-
Case Study
-
단층의 거동 특성 검토를 위한 축소모형실험 사례연구
Case Study of Scale Model Tests to Examine the Behavior Characteristics of Fault
-
김종우
Jong-Woo Kim
- 단층의 거동 특성을 검토하기 위하여 모래, 석고, 시멘트, 물의 혼합물로 모형시험체를 제작하고, 서보 제어 기능을 갖춘 이축 압축 시험장치를 사용하여 축소모형실험을 수행하였다. …
In order to examine the behavioral characteristics of the fault, scaled model tests were performed using a biaxial compression test apparatus with …
- 단층의 거동 특성을 검토하기 위하여 모래, 석고, 시멘트, 물의 혼합물로 모형시험체를 제작하고, 서보 제어 기능을 갖춘 이축 압축 시험장치를 사용하여 축소모형실험을 수행하였다. 총 19개의 모형시험체에 대하여 일정한 구속 하중 조건에서 단층면을 가압 파괴하는 실험을 하였고, 단층의 거동과 파괴응력 조건을 알아보았다. 주향이동단층 모형은 시험체의 대각선 방향에 존재하는 단층면을 따라 전단 변형하였고, 역단층 모형은 상반이 하반 위로 타고 오르는 거동을 보여서, 물리적인 실험을 통해 단층 운동을 실증적으로 규명하였다. 거칠고 맞물린 단층면을 가진 모형은 편평한 단층면을 가진 모형보다 파괴하중이 작았고, 시험 전에 서로 맞물렸던 단층면의 요철부가 마모되면서 생긴 파쇄 부스러기는 단층 충전물처럼 거동하여 전단저항을 감소시켰음을 확인하였다.
- COLLAPSE
In order to examine the behavioral characteristics of the fault, scaled model tests were performed using a biaxial compression test apparatus with servo control function. Test specimens were made of a mixture of sand, gypsum, cement and water. The behavior and the failure stress conditions of the faults were investigated by conducting an experiment to pressurize and destroy the fault planes under constant constraint load conditions for 19 model specimens. The strike-slip fault models were displaced along a fault plane that existed in the diagonal direction of the test specimens, and the reverse fault models showed the behavior of the hanging wall riding up the foot wall, so that the fault behavior was empirically identified through physical experiments. The model with a rough and interlocked fault plane had a lower breaking load than the model with a flat fault plane. It was confirmed that the crushed crumbs caused by the wear of the irregularities on the interlocked fault plane acted like a fault gouge to reduce shear resistance.

-
단층의 거동 특성 검토를 위한 축소모형실험 사례연구
-
Case Study
-
발파진동 실측 데이터를 활용한 지하구조물의 발파진동 영향 분석
Analysis of Blasting Vibration Impacts on Underground Structures Using Field-Measured Data
-
이현우, 이승중, 최성웅
Hyeon-Woo Lee, Seung-Joong Lee, Sung-Oong Choi
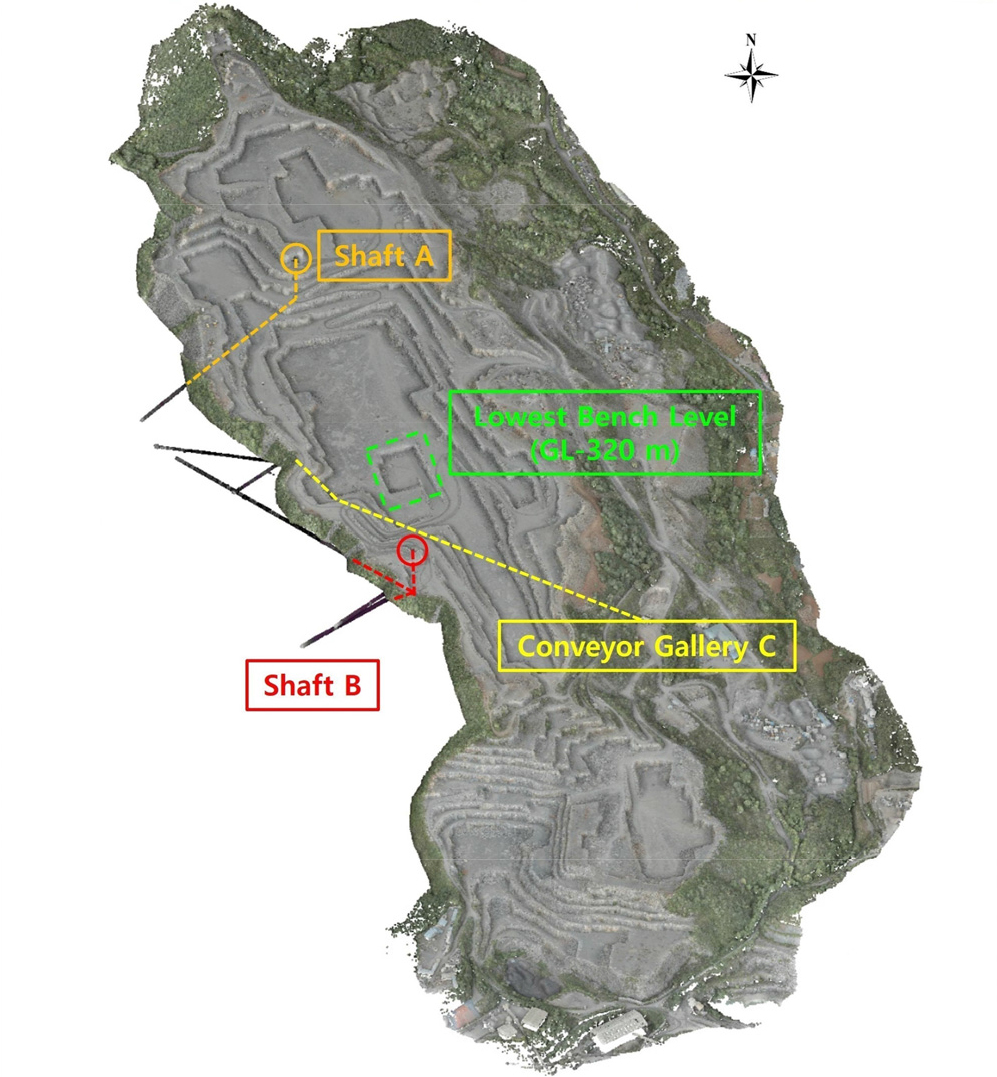
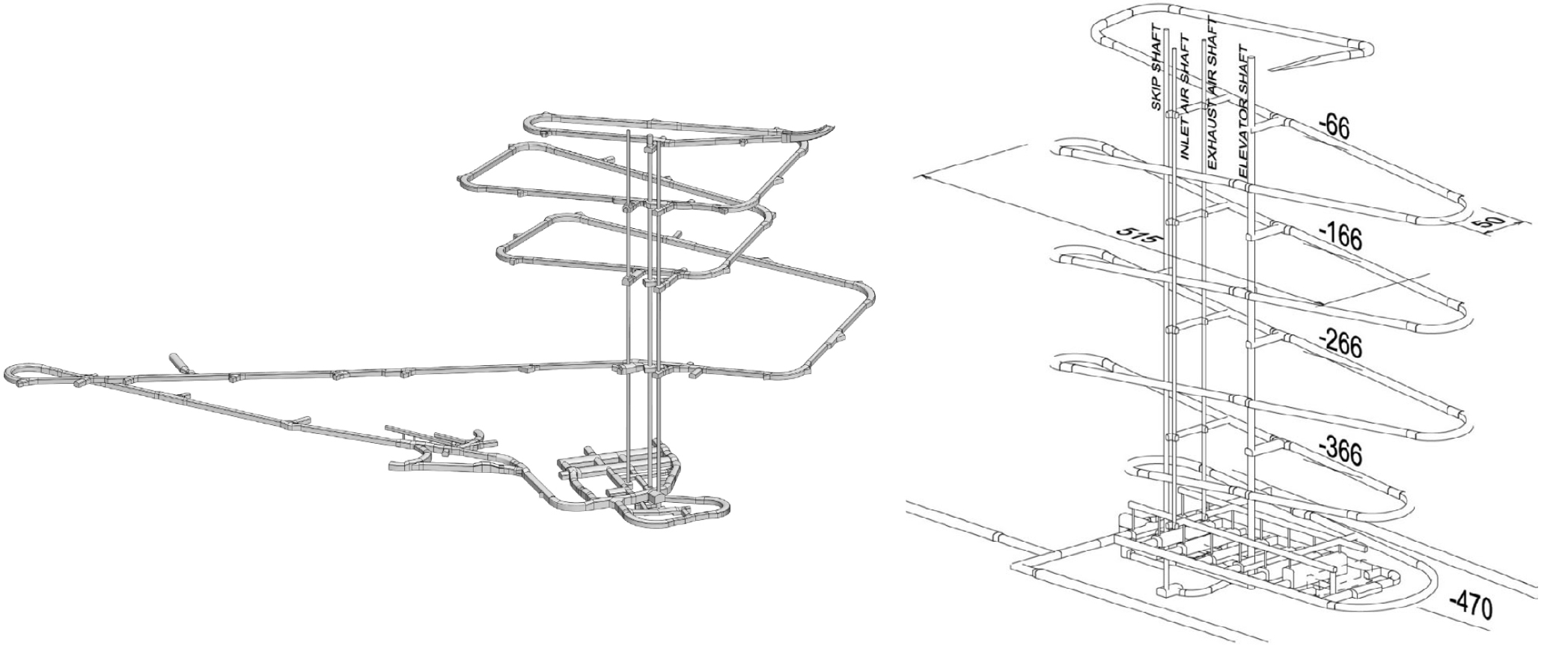
- 본 연구에서는 노천 석회석 광산의 지하구조물에 대한 발파진동 영향을 분석하기 위해 실측된 발파진동 데이터를 토대로 수치해석적 안정성 분석을 실시하였다. 3차원 수치해석 모델을 …
The effects of blasting vibration on underground structures were numerically analyzed using field-measured data. The research target facility is an open-pit limestone …
- 본 연구에서는 노천 석회석 광산의 지하구조물에 대한 발파진동 영향을 분석하기 위해 실측된 발파진동 데이터를 토대로 수치해석적 안정성 분석을 실시하였다. 3차원 수치해석 모델을 구축하기 위하여 드론 및 LiDAR 측량 자료를 기반으로 실측 형상을 반영하였으며, 수치해석의 주요 입력자료인 발파하중은 현장에서 수행된 발파진동계측 결과를 토대로 역해석을 수행하여 직접 산정하였다. 연구대상 광산의 주요 지하구조물에 인접하여 수행되고 있는 발파작업이 구조물의 안정성에 미치는 영향을 분석하기 위해 수행된 3차원 연속체 동적해석 결과, 적정 수준의 지발당 장약량 적용 시 지하구조물의 안정성에 큰 문제는 없는 것으로 확인되었으며, 역해석을 통해 산정된 발파하중 역시 발파진동 계측값으로부터 도출된 발파진동추정식을 합리적인 수준에서 재현하고 있는 것으로 확인된다. 따라서 본 연구에서 적용된 역해석 기반의 발파하중 산정기법은 지하구조물에 대한 발파진동 영향 평가 시 최적의 동하중 해석용 입력자료 제공에 활용 가능하며, 향후 이와 유사한 현장에 대해 발파진동 영향평가 시 최적의 해석방법의 하나로 제안될 수 있을 것으로 판단된다.
- COLLAPSE
The effects of blasting vibration on underground structures were numerically analyzed using field-measured data. The research target facility is an open-pit limestone mine. The 3D numerical model for the analysis was constructed using the actual topography based on drone and LiDAR surveying data, and the blasting load which is the main input data in dynamic analysis was determined through back-analysis of the field-measured blasting vibration results. The analysis of the effects of blasting operations revealed that the stability of the underground structures was not significantly compromised when an appropriate maximum charge weight per delay was applied. Also, it was confirmed that the blasting load determined through back-analysis reproduced the blasting vibration regression equation derived from the field-measured data in a highly reasonable manner. Therefore, the back-analysis-based blasting load estimation technique can be effectively utilized as a method to determine input data for dynamic numerical analysis to evaluate blasting vibration impacts on underground structures. Consequently, the methodology proposed in this study is considered appropriate as an approach and analytical procedure for blasting vibration impact assessments.
-
발파진동 실측 데이터를 활용한 지하구조물의 발파진동 영향 분석
-
Case Study
-
고준위방사성폐기물 심층처분시설 수직구 및 경사로의 설계적합성 검증체계 개발을 위한 사례 연구
A Case Study on the Development of a Design Verification System for Shafts and Ramps in Deep Geological Repositories for High-Level Radioactive Waste
-
박경규, 안성진, 임경호, 박의섭, 김형목
Kyung-Kyu Park, Seong-Jin Ahn, Kyung-Ho Lim, Eui-Seob Park, Hyung-Mok Kim
- 고준위방사성폐기물 심층처분시설의 진입구역은 인력, 장비, 자재 및 폐기물 운송, 환기, 배수, 비상대피와 유지관리를 위한 핵심 접근시설이다. 경사진입로와 수직구로 대표되는 진입구역의 굴착 과정에서는 …
The access area of a deep geological repository for high-level radioactive waste is a key access facility for the transportation of personnel, …
- 고준위방사성폐기물 심층처분시설의 진입구역은 인력, 장비, 자재 및 폐기물 운송, 환기, 배수, 비상대피와 유지관리를 위한 핵심 접근시설이다. 경사진입로와 수직구로 대표되는 진입구역의 굴착 과정에서는 모암 손상, 지하수 유입, 굴착손상영역 및 수리·역학적 교란이 발생할 수 있으며, 폐쇄 후에는 지표와 처분구역을 연결하는 잠재적 핵종 유동경로로 작용할 가능성이 있다. 따라서 진입구역 설계는 구조적 안정성과 시공성뿐만 아니라 운영안전성, 폐쇄 후 장기 격리성능 및 품질보증 체계와 연계한 사전 규제적 관점에서 면밀하게 검토될 필요가 있다. 이를 위해 본 연구에서는 진입구역에 적용 가능한 국내외 규제요건과 품질관리 항목을 검토하고, 핀란드 ONKALO와 스웨덴 Forsmark의 관련 사례를 분석하였다. 분석 결과, 진입구역 설계는 부지조건, 처분개념, 운송·환기계획, 지하수 유입 제어, EDZ 관리, 지보 및 그라우팅 계획, 폐쇄 후 밀봉 가능성을 종합적으로 고려해야 함을 확인하였다. 이를 바탕으로 진입동선 체계, 경사진입로, 수직구 및 공통 품질관리 항목을 포함하는 단계적 검증 절차와 설계검토 체크리스트를 제안하였다. 제안된 검증절차와 체크리스트는 향후 국내 심층처분시설 및 지하연구시설의 진입구역 설계적합성 검증체계 구축을 위한 기초자료로 활용될 수 있을 것으로 판단된다.
- COLLAPSE
The access area of a deep geological repository for high-level radioactive waste is a key access facility for the transportation of personnel, equipment, materials, and waste, as well as for ventilation, drainage, emergency evacuation, and maintenance. During the excavation of the access area, typically represented by access ramps and shafts, host rock damage, groundwater inflow, excavation damaged zones (EDZs), and hydro-mechanical disturbances may occur. After closure, the access area may also act as a potential radionuclide flow pathway connecting the surface and the disposal area. Therefore, the design of the access area needs to be carefully reviewed from a proactive regulatory perspective in connection with structural stability, constructability, operational safety, post-closure long-term isolation performance, and quality assurance systems. In this study, domestic and international regulatory requirements and quality management items applicable to the access area were reviewed, and relevant cases from ONKALO in Finland and Forsmark in Sweden were analyzed. The results indicate that the design of the access area should comprehensively consider site conditions, disposal concepts, transportation and ventilation plans, groundwater inflow control, EDZ management, rock support and grouting plans, and post-closure sealing feasibility. Based on these findings, this study proposes a stepwise verification procedure and a design review checklist covering the access route system, access ramp, shafts, and common quality management items. The proposed verification procedure and checklist are expected to serve as basic reference materials for establishing a design suitability verification framework for the access area of future deep geological repositories and underground research facilities in Korea.
-
고준위방사성폐기물 심층처분시설 수직구 및 경사로의 설계적합성 검증체계 개발을 위한 사례 연구

-
Original Article
-
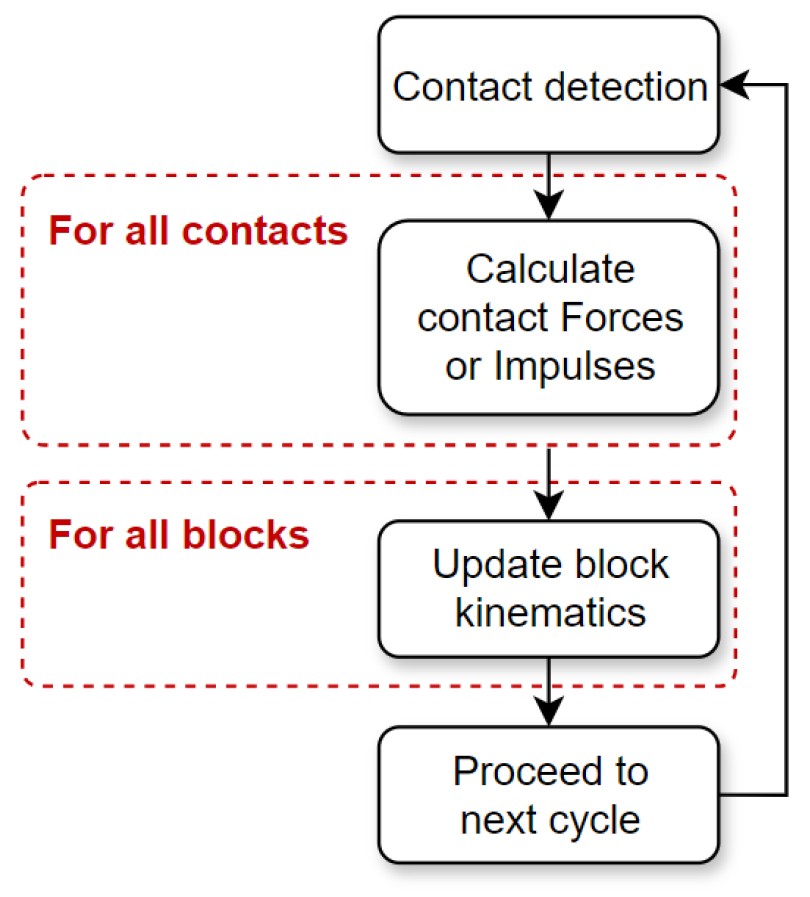
시간 간격 변화에 따른 DEM 접촉 해석 기법별 수치 응답 특성 비교: Spring model 및 Impulse-based method
Comparison of Numerical Response Characteristics of DEM Contact Formulations under Varying Timesteps: Spring Model and Impulse-based Method
-
이제겸, 송명규, 김창용, 유완규, 윤지석, 이승원
Je-Kyum Lee, Myung-Kyu Song, Chang-Yong Kim, Wan-Kyu Yoo, Ji-Seok Yun, Sean Seungwon Lee
- 불연속 암반의 거동을 모사하기 위해 개별요소법(Discrete Element Method, DEM)이 널리 활용되고 있으나, 접촉 응답을 계산하는 방식에 따라 해석 결과의 수치적 안정성, 접촉 …
The discrete element method (DEM) is widely used to simulate the mechanical behavior of discontinuous rock masses; however, the numerical stability, reproducibility …
- 불연속 암반의 거동을 모사하기 위해 개별요소법(Discrete Element Method, DEM)이 널리 활용되고 있으나, 접촉 응답을 계산하는 방식에 따라 해석 결과의 수치적 안정성, 접촉 이력 재현성 및 계산 효율성은 달라질 수 있다. 본 연구에서는 DEM의 대표적인 접촉 해석 기법인 Spring model과 Impulse-based method를 대상으로, 동일한 해석 조건에서 시간 간격 변화에 따른 수치 응답 특성을 비교·분석하였다. 이를 위해 정적 접촉, 준정적 전단, 회전 및 동적 충돌 조건을 설정하고, 접촉력, 전단저항, 속도, 위치 및 에너지 응답을 비교하였다. 해석 결과, Spring model은 정적 접촉 및 준정적 전단 조건에서 접촉력 변화와 전단저항의 점진적 발현을 재현하는 데 유리하였으나, 시간 간격 증가에 따라 접촉력 진동, 에너지 응답 왜곡 및 발산이 나타났다. 반면, Impulse-based method는 회전 및 동적 충돌 조건에서 상대적으로 큰 시간 간격에서도 안정적인 운동 응답을 보였으나, 접촉 이력에 기반한 준정적 전단 거동을 재현하는 데에는 제한이 있었다. 두 기법의 접촉 계산 방식의 차이는 시간 간격 변화에 대한 민감성의 차이로 나타났으며, 이는 해석의 초점이 접촉 이력에 있는지, 운동량 변화에 있는지에 따라 각 기법의 적합성을 가르는 요인이 된다. 향후 Impulse-based method의 한계를 보완하는 연구가 수행된다면, 계산 효율성을 유지하면서 절리 암반 해석으로 적용 범위를 확장할 수 있을 것으로 기대된다.
- COLLAPSE
The discrete element method (DEM) is widely used to simulate the mechanical behavior of discontinuous rock masses; however, the numerical stability, reproducibility of contact history, and computational efficiency of the analysis can vary depending on the contact calculation method adopted. In this study, two representative DEM contact formulations, the spring model and the impulse-based method, were comparatively analyzed in terms of their numerical response to variations in the timestep under identical simulation conditions. To this end, static contact, quasi-static shear, rotational, and dynamic impact conditions were considered, and the contact force, shear resistance, velocity, position, and energy responses were compared. The results show that the spring model effectively reproduces the gradual mobilization of contact force and shear resistance under static contact and quasi-static shear conditions, but exhibits contact force oscillation, distortion of the energy response, and divergence as the timestep increases. In contrast, the impulse-based method maintains a stable kinematic response even at relatively large timesteps under rotational and dynamic impact conditions, yet shows limitations in reproducing the quasi-static shear behavior that relies on contact history. The difference in the contact calculation schemes of the two methods manifests as a difference in their sensitivity to the timestep, which in turn determines the suitability of each method depending on whether the analysis focuses on contact history or momentum change. These findings suggest that, if future studies address the limitations of the impulse-based method, its application can be extended to jointed rock mass analysis while preserving its computational efficiency.
-
시간 간격 변화에 따른 DEM 접촉 해석 기법별 수치 응답 특성 비교: Spring model 및 Impulse-based method
-
Original Article
-
고준위방사성폐기물 부지선정과 심층처분시설 설계를 위한 국내 심부 결정질암의 열물성 평가
Evaluation of Thermal Properties of Various Deep Crystalline Rocks for Site Selection and Design of High-Level Radioactive Waste Deep Disposal in Korea
-
이재원, 이상빈, 정종원, 김기석, 최준형, 천대성
Jaewon Lee, Sangbeen Lee, Jongwon Jung, Ki Seog Kim, Junhyung Choi, Dae-Sung Cheon
- 현재 국내에서는 고준위방사성폐기물을 심부 암반층에 영구적으로 처분하는 심층 처분이 추진되고 있다. 암반의 열물성은 심층 처분 시 처분공 간격과 처분터널 간격, 심층처분시설 체적 …
Currently, deep disposal is being promoted in Korea for the permanent disposal of high-level radioactive waste (HLW) within deep rock formations. The …
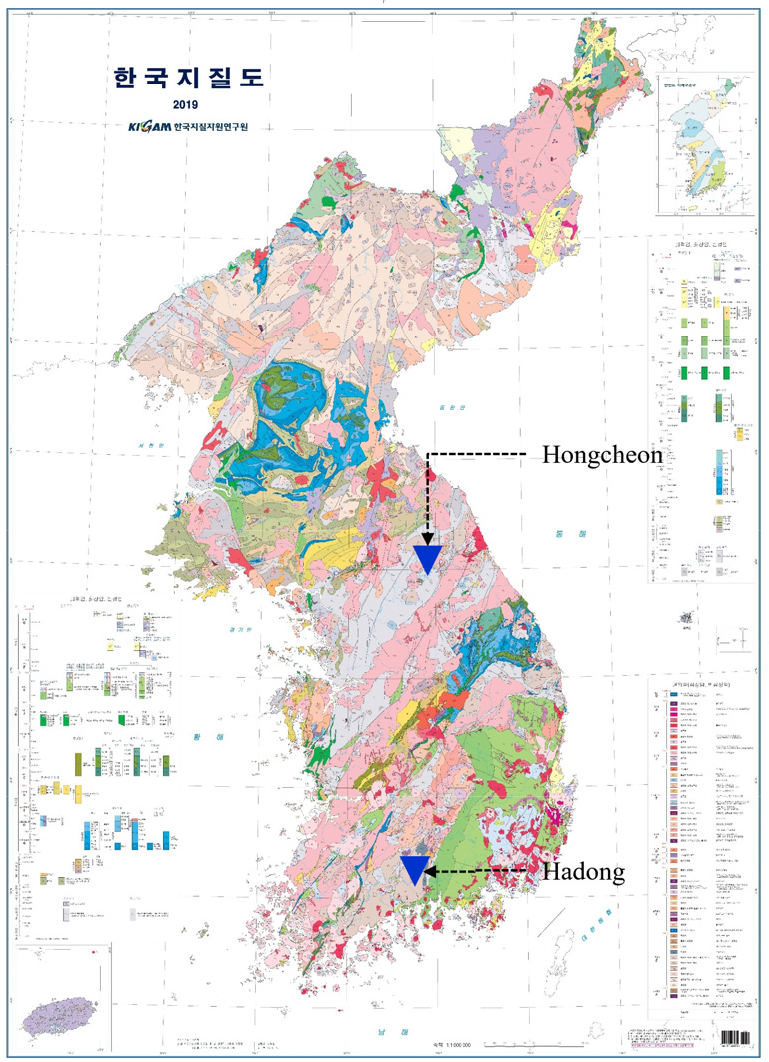
- 현재 국내에서는 고준위방사성폐기물을 심부 암반층에 영구적으로 처분하는 심층 처분이 추진되고 있다. 암반의 열물성은 심층 처분 시 처분공 간격과 처분터널 간격, 심층처분시설 체적 등을 결정하는 주요한 인자로서 이는 처분부지 및 경제성 확보를 위해 필수적으로 고려되어야 한다. 하지만 국내에서는 심부 암반의 열물성을 측정한 사례가 드물다. 심층처분시설의 모암으로 고려되는 결정질암으로 화강암과 편마암 등이 있으며, 본 연구에서는 편마암 지대에 위치한 홍천과 하동에서 심부 암석을 채취하여 연구를 수행하였다. 열물성은 TPS를 사용하여 열전도도, 비열, 열확산율을 산출하였고, 스트레인 게이지를 사용하여 열팽창계수를 측정한 뒤 결정질암인 화강암을 중심으로 국내외 문헌과 비교하였다. XRD 분석을 통해 조암광물과 열전도도의 상관성을 분석하였다. 본 연구 측정값 및 문헌값 모두 열전도도에 따른 열확산율이 비례 관계를 보였다. 석영 함량에 따른 열전도도 분석이 가장 높은 정확도를 갖는 것으로 확인하였다. 본 연구 결과는 국내 고준위방사성폐기물 부지 선정과 심층처분시설 설계 과정에 있어 중요한 기초 자료로 활용될 것으로 기대된다.
- COLLAPSE
Currently, deep disposal is being promoted in Korea for the permanent disposal of high-level radioactive waste (HLW) within deep rock formations. The thermal properties of the rock mass are critical factors that determine the spacing between disposal holes and tunnels, as well as the total volume of the disposal facility. Therefore, these properties must be evaluated to ensure the economic feasibility and suitability of a disposal site. However, measured data on the thermal properties of deep rock formations in Korea remain scarce. Crystalline rock considered as a host rock in deep disposal repository includes granite and gneiss. In this study, deep rock samples were collected from Hongcheon and Hadong, which are located in gneiss regions. Thermal properties, including thermal conductivity, specific heat, and thermal diffusivity were determined using the Transient plane source method (TPS), while the coefficient of thermal expansion was measured using strain gauges. Furthermore, X-ray diffraction (XRD) analysis confirmed that rock-forming minerals are key factors influencing thermal conductivity. Both the measured values from this study and the existing literature data exhibited a proportional relationship between thermal conductivity and thermal diffusivity. Furthermore, it was confirmed that the analysis of thermal conductivity based on quartz content yielded the highest accuracy. The findings of this study are expected to serve as significant fundamental data for the site selection and design processes of deep disposal facilities in Korea.
-
고준위방사성폐기물 부지선정과 심층처분시설 설계를 위한 국내 심부 결정질암의 열물성 평가
-
Original Article
-
고준위방사성폐기물 부지선정 및 처분시설 안정성 평가를 위한 일축압축강도 산정 및 검증 방안 연구
Study on the Estimation and Verification of Uniaxial Compressive Strength for Site Selection and Stability Assessment of High-Level Radioactive Waste Disposal Facilities
-
천대성, 최준형, 박찬, 채병곤
Dae-Sung Cheon, Junhyung Choi, Chan Park, Byung-Gon Chae
- 고준위방사성폐기물 처분시설의 안전한 설계와 시공을 위해서는 처분부지 암반의 역학적 특성을 정확히 파악하는 것이 필수적이다. 본 연구에서는 처분부지 선정의 부지특성화 단계에서 핵심 평가인자인 …
For the safe design and construction of high-level radioactive waste (HLW) disposal facilities, it is essential to accurately characterize the mechanical properties …
- 고준위방사성폐기물 처분시설의 안전한 설계와 시공을 위해서는 처분부지 암반의 역학적 특성을 정확히 파악하는 것이 필수적이다. 본 연구에서는 처분부지 선정의 부지특성화 단계에서 핵심 평가인자인 일축압축강도(UCS)의 산정과 신뢰성을 확보하기 위한 검증 방안을 제시하였다. 일축압축강도를 산정하기 위해 제시된 국내외 표준시험법(ASTM, ISRM, KS, KSRM)을 비교 분석하고, 시료 제작부터 시험, 결과 보고에 이르는 전 과정의 품질관리 요소를 도출하였다. 특히 강원도 원주 지역의 화강암 시추 코어를 대상으로 한 실증 사례를 통해 측정 시스템의 오차 검증과 자연적 불확실성의 정량화 방법을 검토하였다. 국외 사례를 통해 중심극한정리를 활용한 95% 신뢰구간 산정 등 통계적 기법을 적용하여 설계 인자의 대표성을 확보하는 방안을 논의하였다. 본 연구에서 제시된 검증 방안은 역학적 평가인자인 일축압축강도 이외 타 분야의 평가인자를 산정하고 검증하는 방법론으로 활용될 수 있을 것으로 기대된다.
- COLLAPSE
For the safe design and construction of high-level radioactive waste (HLW) disposal facilities, it is essential to accurately characterize the mechanical properties of the rock mass at the disposal site. This study presents methods for estimating and verifying the Uniaxial Compressive Strength (UCS), a key evaluation parameter during the site characterization stage of site selection, to ensure its reliability. We conducted a comparative analysis of domestic and international standard test methods (ASTM, ISRM, KS, KSRM) for UCS and identified quality control factors across the entire process, from specimen preparation and testing to result reporting. Specifically, using granite drill cores from the Wonju area as a case study, we examined error verification of the measurement systems and methods for quantifying natural uncertainties. Furthermore, based on international precedents, we discussed methods for ensuring the representativeness of design parameters by applying statistical techniques, such as calculating 95% confidence intervals using the Central Limit Theorem. The verification methods proposed in this study are expected to serve as a versatile methodology for estimating and validating evaluation parameters in other fields beyond mechanical properties like UCS.
-
고준위방사성폐기물 부지선정 및 처분시설 안정성 평가를 위한 일축압축강도 산정 및 검증 방안 연구
 Tunnel and Underground Space
Tunnel and Underground Space