

1. 서 론
2. 연구 방법
2.1 조향 방식의 이론적 배경
2.2 자율주행 로봇의 구성
2.3 현장 실험
3. 연구결과
3.1 현장 실험 결과
4. 토 의
4.1 시뮬레이션 기반 조향 메커니즘 분석
4.2 시뮬레이션 결과와 현장 실험 결과의 비교
5. 결 론
1. 서 론
자율주행 로봇(Autonomous Driving Robot)이란 사람의 개입 없이 스스로 주변 환경을 인식하고 이동하는 로봇을 말한다(Kanayama et al., 1990). 자율주행 로봇은 사전에 정해진 경로를 따라 이동하는 Automated Guided Vehicle (AGV)와 실시간으로 주변 환경을 인식해서 목적지까지 이동하는 Autonomous Mobile Robot (AMR) 등이 있다. 최근 인공지능, 센서, 통신 기술의 발전으로 자율주행 로봇의 활용도가 높아지고, 물류(Fragapane et al., 2021), 탐사(Alatise and Hancke, 2020) 등 다양한 산업 현장에 도입되어 활용되고 있다.
자율주행 로봇은 실내나 도심지처럼 도로 표면 상태가 양호한 환경에서 주로 운용되지만, 일부 분야에서는 험지 지형과 같은 거친 환경에서도 활용되고 있다. Mitra(2019)는 농업 분야에서 고르지 않은 땅과 변화하는 기후 조건에서도 작물을 관리가 가능한 자율주행 로봇 TerraSentia를 개발하였고, Ha et al.(2019)는 군사 분야에서 토목 작업을 수행하도록 하는 로봇 자율 시스템(Robotics and Autonomous Systems, RAS)을 만들었다. 또한, 건설 현장에서도 Johns et al.(2020)은 Global Positioning System (GPS)와 Light Detection and Ranging (LiDAR)를 사용해 굴착 작업을 자율적으로 수행하는 자동 굴착기를 개발했다.
최근 광물을 채굴하는 광업 현장에서도 자율주행 로봇을 활용한 연구 사례들이 다수 있었다(Wu et al., 2019, Kumar et al., 2013, Bharathi and Samuel, 2013). 대표적으로 지하 광산에서 발생할 수 있는 안전사고들을 예방하기 위해 자율주행 로봇을 통해 정찰 작업을 수행하는 연구들이 있었다. Zhao et al.(2017)은 지하광산 환경에서 화재 발생 여부를 탐지하는 자율주행 로봇을 개발하였고, 현장 검증을 통해 활용 가능성에 대해 분석하였다. 또한, Szrek et al.(2020) 어두운 지하 환경에서 열화상 카메라를 활용하여 작업자를 인식하는 자율주행 로봇을 개발하였고, 다양한 작업환경에서 인식 정확도를 평가하였다. 그뿐만 아니라, Kim and Choi(2021b)는 지하광산의 온도, 습도, 분진 농도 등을 자동으로 측정하고 위험 여부를 감지하는 자율주행 로봇을 개발한 후 현장 실험을 통해 활용 가능성을 검증하였다.
자율주행 로봇을 통해 지하 광산의 갱도를 측량하여 공동의 구조적인 안정성을 평가하기 위한 연구들도 수행되었다(Neumann et al., 2014, Baker et al., 2004). 정확한 측량을 위해서는 로봇의 위치를 정밀하게 인식하는 것이 매우 중요한데, 지하 광산 환경의 경우 GPS를 통한 위치 인식이 불가능하므로, 로봇의 자체적인 측위 시스템을 통해 로봇의 위치와 자세 등을 인식하여야 한다(Lösch et al., 2018). 로봇의 위치를 인식하기 위해 휠 엔코더, LiDAR, Inertial Measurement Unit (IMU)과 같은 센서들을 활용하여 로봇의 자체적인 위치 인식 기술을 도입한 연구 사례들이 다수 있었다(Li et al., 2020, Cui et al., 2023, Chi et al., 2012).
로봇이 주변 환경지도를 작성하면서 자체적으로 위치를 추정하는 Simultaneous Localization and Mapping (SLAM) 기술을 통해 로봇의 위치추정 정확도를 향상하기 위한 연구들이 다수 수행되었다(Dellenbach et al., 2022, Chen et al., 2023, Filipenko and Afanasyev, 2018). 대표적으로 Zhang and Singh(2014)은 3D LiDAR 통해 3차원 지도를 만들면서 로봇의 이동 궤적을 예측하는 LiDAR Odometry and Mapping (LOAM) 알고리즘을 개발하였다. 또, LOAM 알고리즘의 한계점을 보완하기 위해 FAST-LOAM (Wang et al., 2021), LEGO LOAM (Shan and Englot, 2018), FAST-LIO (Xu and Zhang, 2021), LIO-SAM (Shan et al., 2020)과 같은 알고리즘들이 개발되었다.
험지 환경에서도 로봇의 위치를 정밀하게 인식하기 위한 연구들이 다수 수행되었다(Ren et al., 2019, Kim and Choi, 2021a, Ren and Wang, 2022). 이때, 지하 광산 환경은 바닥 면이 매우 거칠고 질퍽하기 때문에 바퀴의 슬립 현상에 의한 위치 오차가 크게 발생하는 사례들이 다수 있었고, 오차를 최소화하기 위한 연구들이 다수 수행되었다(Kim and Choi, 2022, Ghosh et al., 2017, Jacobson et al., 2018). 그러나 기존 지하 험지 환경에서 위치 오차를 최소화하기 위한 연구들은 다수 수행되었지만, 모바일 로봇의 조향 메커니즘에 따른 위치 오차에 대한 분석은 수행하지 않았다. 지하 험지 환경에서는 바퀴의 슬립 현상이 매우 빈번하게 발생하며, 로봇의 바퀴 형태와 조향 방식에 의해 위치 인식 정확도가 큰 영향을 받는다. 따라서 험지 환경에서 활용될 수 있는 모바일 로봇의 조향 제어 메커니즘에 대한 비교를 통해 위치 오차를 최소화하는 방법에 대한 분석이 필요하다.
본 연구의 목적은 지하 험지 환경에서 활용될 수 있는 자율주행 로봇의 조향 메커니즘들을 비교, 분석하는 것이다. 분석을 위해 세 종류(Ackermann, differential, tracked)의 조향 메커니즘을 탑재한 자율주행 로봇을 활용하여 지하 험지 환경에서 현장 실험을 수행하였다. 각각의 조향 메커니즘들의 위치추정 정확도를 분석하기 위해 실제 이동 경로는 현장 실험에서 촬영된 영상 데이터를 기반으로 위치를 산정하여 경로를 구성하였고, 이를 2D LiDAR와 Adaptive Monte Carlo Localization (AMCL) 알고리즘을 통해 보정된 이동 경로를 비교하여 조향 방식에 따른 바퀴 슬립과 경로 오차를 분석하였다.
2. 연구 방법
2.1 조향 방식의 이론적 배경
2.1.1 Ackermann 조향 매커니즘
Ackermann 조향은 Rudolf Ackermann이 정의한 방식으로, 전륜이 방향을 제어하고 후륜이 구동을 담당하는 시스템이다(Rajamani, 2011). 차량의 전륜과 후륜 사이의 거리인 휠베이스와 회전 각도에 따라 전륜 좌우의 바퀴 조향각이 결정된다. 조향할 때 좌측 바퀴가 우측 바퀴보다 작은 반경을 따른다. 이를 통해 차량이 회전할 때 네 바퀴가 같은 중심을 기준으로 움직여, 코너링 성능을 크게 향상시키며 타이어의 마찰력을 최소화하고 회전 중 슬립을 줄이는 효과가 있다. 하지만 이때 고속으로 커브를 돌 때는 원심력으로 바깥쪽 타이어에 큰 하중이 실려 Ackermann 조향각이 미끄러짐을 유발할 수 있다. Fig. 1은 Ackermann 조향의 운동학 모델에서 앞바퀴의 조향각이 어떻게 결정되는지를 설명하며, 이 모델은 다음과 같은 방정식 (1), (2), (3)으로 나타낼 수 있다(Yun et al., 2023).
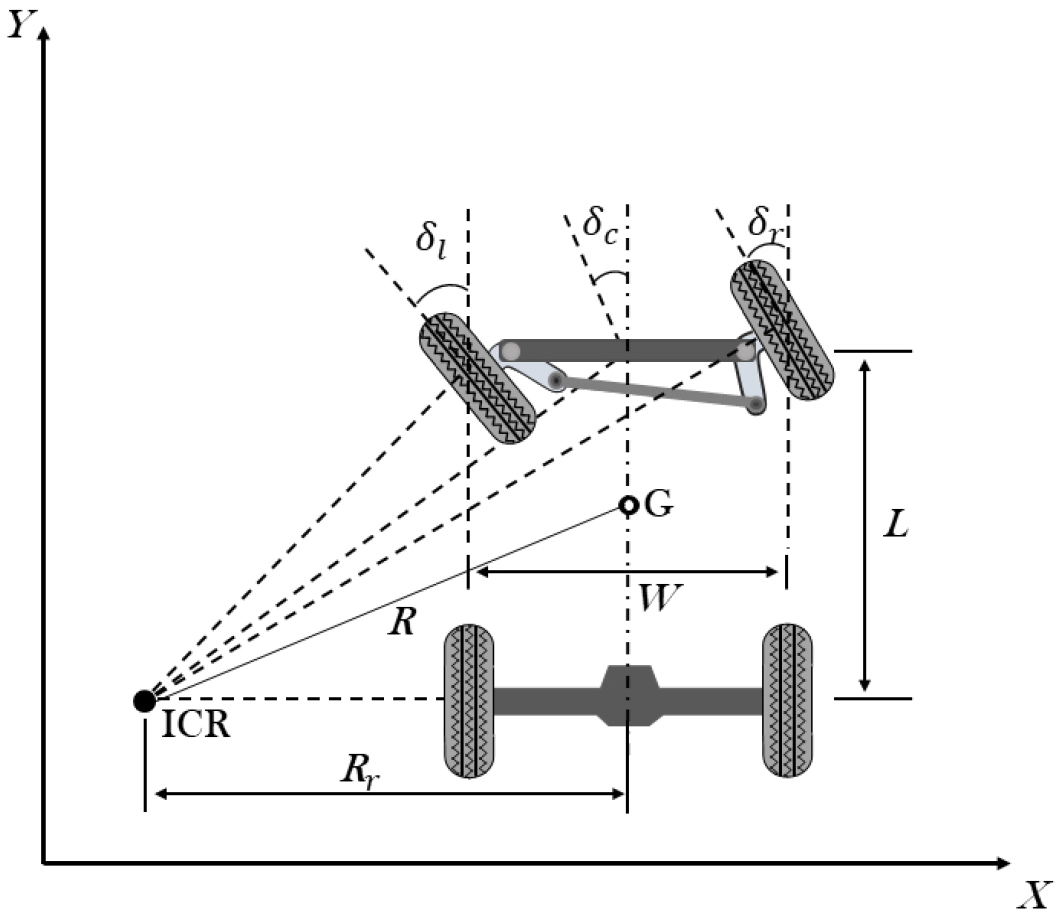
여기서 전륜과 후륜 사이의 거리(wheelbase)를 L (m), 바퀴 간의 거리(차폭)를 W (m), 회전 중심에서 뒤쪽 차축의 중심까지의 거리를 (m), , 은 각각 우측과 좌측의 조향각(rad), 는 차량의 조향각(rad), 회전 반경 R (m)이다. 이 방정식은 차량이 회전할 때 좌측과 우측 바퀴의 조향각이 각각 어떻게 계산되는지 나타내고, 이를 통해 코너링 성능을 향상시켜 타이어의 마모를 줄이고 슬립을 방지할 수 있는 Ackermann 조향의 효과를 설명할 수 있다.
2.1.2 Differential 조향 매커니즘
Differential 조향은 좌우 바퀴의 속도 차이를 이용해 차량의 방향을 전환하는 방식이다(Wu et al., 2013). 그렇기에 별도의 조향 장치 없이도 차량을 제어할 수 있어 구조가 단순하며, 각 바퀴에 동력을 제공하여 제어하기 때문에 속도를 개별적으로 조절할 수 있다. 또한, 좌우 바퀴의 회전 속도 차이를 이용하므로, 제자리 회전이 가능하여 좁은 공간에서도 기동성이 뛰어나며 장애물을 상대적으로 쉽게 피할 수 있다. 하지만 좌우 바퀴의 회전 속도 차이를 이용하므로 직진 주행 시 안정성이 상대적으로 낮다. 즉, 좌우 바퀴의 속도 차이가 크면 차량이 더 빠르게 회전하지만, 속도 차이가 거의 없으면 직진 주행에서 불안정해질 수 있다. Fig. 2는 differential 조향의 운동학을 보여준다. 각 바퀴의 선형 속도와 각속도에 따라 움직임이 결정되며, 이는 다음 방정식 (4), (5), (6), (7), (8)으로 표현된다(Wu et al., 2013).
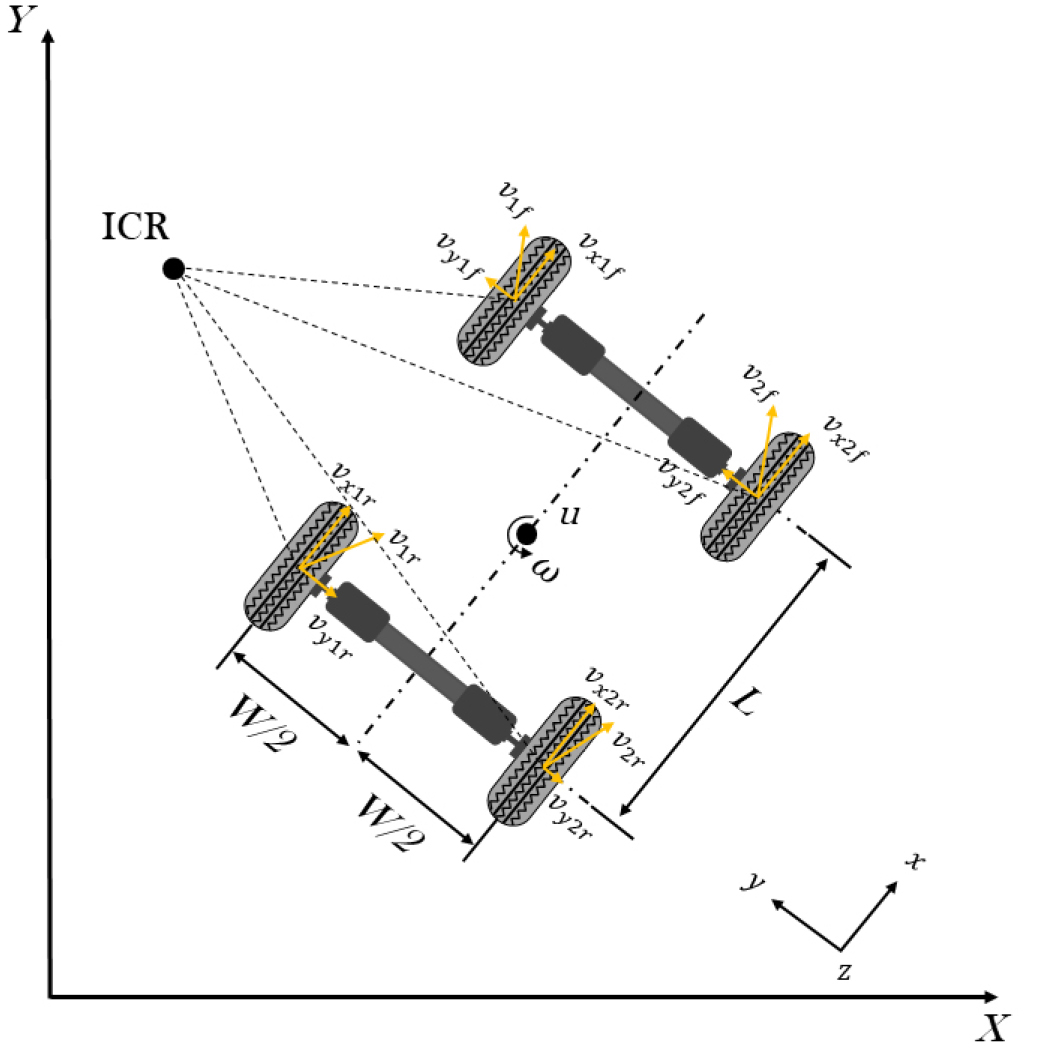
Fig. 2에서 는 앞 왼쪽 바퀴의 종속도(m/s), 는 앞 왼쪽 바퀴의 횡속도(m/s), 는 뒤 왼쪽 바퀴의 종속도(m/s), 는 뒤 왼쪽 바퀴의 횡속도(m/s), 는 앞 오른쪽 바퀴의 종속도(m/s), 는 앞 오른쪽 바퀴의 횡속도(m/s), 는 뒤 오른쪽 바퀴의 종속도(m/s), 는 뒤 오른쪽 바퀴의 횡속도(m/s)를 의미한다. 그리고 방정식 (4), (5), (6), (7), (8)에서 각 바퀴의 선형 속도는 , , , 로 각각 앞 왼쪽, 뒤 왼쪽, 앞 오른쪽, 뒤 오른쪽 바퀴의 선형 속도(m/s)를 나타낸다. 은 각각 오른쪽과 왼쪽 바퀴의 속도(m/s), 는 차량의 선형 속도(m/s), 𝜔는 각속도(rad/s), R은 회전 반경(m)이다. 이 방정식을 통해, 좌우 바퀴의 속도 차이에 따라 차량의 회전 속도와 이동 속도를 계산할 수 있다.
2.1.3 Tracked 조향 매커니즘
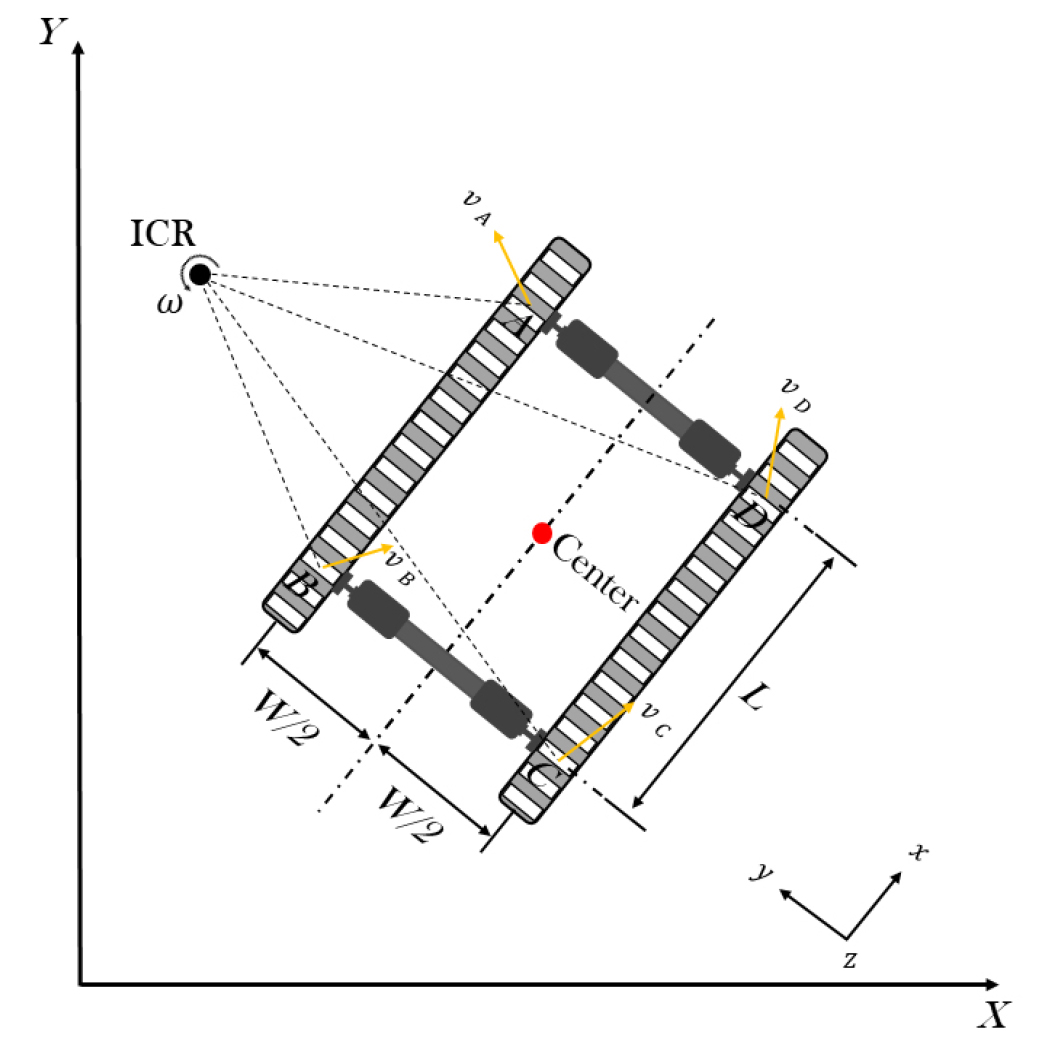
Tracked 조향은 좌우에 설치된 궤도를 개별적으로 제어하여 방향을 바꾸는 방식이다(Han et al., 2022). 좌우의 속도 차이를 통해 제어한다는 점에서 differential 조향과 비슷하지만, 양쪽에 트랙을 사용해 지면과 접촉 면적이 넓어진다는 점에서 차이가 있다. 트랙을 이용해 바퀴보다 큰 견인력과 안정성을 제공하여 험지 환경에서도 주행 능력이 우수한 특징이 있다. 하지만 접촉하는 면적이 커짐에 따라 접지력이 향상돼 구동 저항이 생겨 속도가 느려지는 단점이 존재한다. 또한, 회전할 때 트랙이 지면에 강하게 붙어 있어 회전 저항이 커지므로, 세밀한 조향이 어렵다(Hu and Cheng, 2021). Tracked 조향의 운동학 모델은 differential 조향과 유사하게 양쪽 궤도의 속도 차이를 통해 설명할 수 있다. 이를 그림으로 Fig. 3과 방정식 (9), (10), (11), (12), (13)으로 다음과 같이 나타낼 수 있다(Han et al., 2022).
여기에서는 , , , 는 각 모터에 의한 선형 속도(m/s)이고, , 은 각각 오른쪽과 왼쪽 트랙의 속도(m/s), 는 차량의 선형 속도(m/s), 𝜔는 각속도(rad/s)이다. 이 방정식을 통해, 좌우 트랙의 속도 차이에 따라 차량의 회전 속도와 이동 속도, 회전 반경을 계산할 수 있다.
2.2 자율주행 로봇의 구성
2.2.1 로봇의 하드웨어 구성
Fig. 4는 본 연구에서 사용한 소형 자율주행 로봇의 구조와 외부 디자인을 보여준다. 이 로봇은 Agilex Robotics의 LIMO PRO이고, 다양한 조향 메커니즘을 지원하도록 설계되어 있다. 로봇은 여러 센서와 모듈이 통합된 구조로, Fig. 5와 Table 1은 로봇의 시스템 구성과 센서, 하드웨어를 보여준다. LIMO PRO는 NVIDIA Orin Nano 프로세서가 탑재되어 있어 다양한 센서의 사용과 SLAM 기능을 구현할 수 있다. 3 EAI T-mini Pro LiDAR와 Dabai depth camera를 통해 360도 주변 환경 인식을 수행한다. 이를 통해 실시간 매핑과 장애물 인식 및 자율주행을 지원한다. 또한, IMU는 가속도계와 자이로스코프를 이용해 로봇의 가속도와 각속도를 측정하여 로봇의 자세 및 방향을 추정하고, LiDAR와 카메라 센서를 결합하여 로봇의 위치와 자세를 정확하게 파악할 수 있어, 더욱 정확한 자율주행이 가능하다.
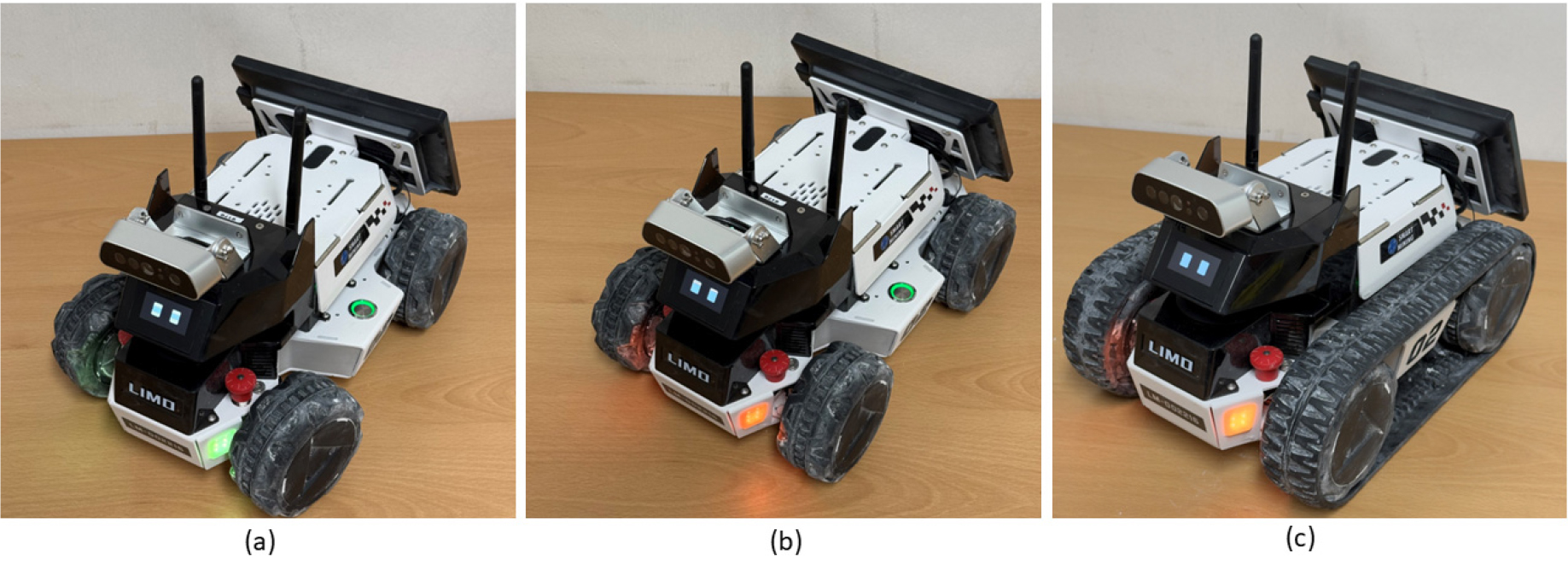
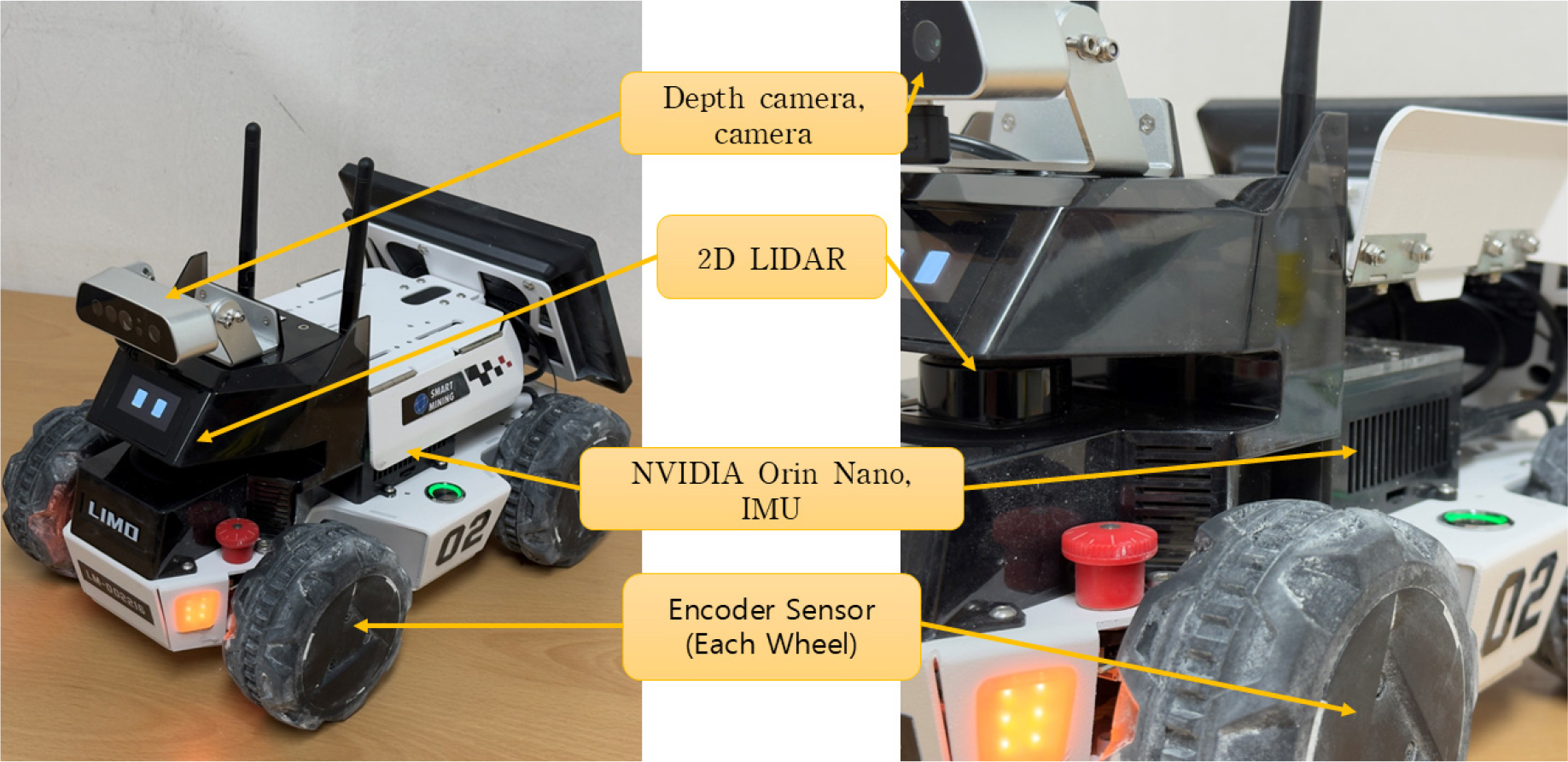
Table 1.
Specifications of the driving robot used in this study
2.2.2 자율주행 알고리즘
자율주행에 사용되는 알고리즘으로 크게 5가지가 존재한다. 먼저 SLAM은 동시적 로컬화와 매핑을 다룬다. SLAM은 로봇이 자신이 이동하는 동안 마주치는 환경에서 로봇의 위치를 확률적으로 추정하면서 불확실성을 처리하는 것이다. SLAM의 한 종류인 GMapping 알고리즘이 있다. GMapping은 파티클 필터 기반의 2D SLAM 알고리즘으로, 로봇이 주행 중 획득하는 센서 데이터를 이용해 실시간으로 맵을 생성한다(Grisetti et al., 2007). 이 알고리즘은 로봇이 이동 경로에서의 자세와 위치를 확률적으로 추정하여, 효율적인 2D 매핑을 수행할 수 있다. AMCL은 로봇이 이미 구축된 맵에서 자신의 위치를 추정하는 데 사용된다. 이 알고리즘은 몬테카를로 방식으로 다양한 위치 샘플을 생성하여 로봇의 위치를 지속해서 수정한다(Thrun, 2002).
Dynamic Window Approach (DWA)는 자율주행 로봇이 실시간으로 장애물을 피하면서 안전하게 목표 지점으로 이동할 수 있도록 경로를 계획하는 알고리즘이다(Fox et al., 1997). 로봇의 속도와 가속도 한계를 고려하여 경로를 최적화하며, 특히 동적 환경에서 자주 사용된다. A* 알고리즘은 경로 탐색에 자주 사용되며, 주어진 환경에서 시작 지점과 목표 지점 사이의 최단 경로를 탐색한다(Hart et al., 1968). 이 알고리즘은 각 노드 간의 경로 비용을 계산하고, 가장 비용이 적은 경로를 선택하여 장애물 회피 및 경로 탐색을 효과적으로 수행한다. 로봇은 이 모든 알고리즘을 사용해 주행 안정성을 높이고, 동적인 환경에서도 정확하고 안전한 주행을 가능하게 한다. 본 연구에서는 global path planning과 local path planning을 수행하기 위해 DWA 알고리즘과 A* 알고리즘을 함께 활용하였다.
2.2.3 자율주행 시 Robot Operating System (ROS)에서 발행되는 토픽
먼저 ROS는 자율주행 로봇의 센서 데이터를 수집하고, 이를 기반으로 로봇의 행동을 제어하는 중요한 통신 중계 임무를 수행한다. 본 연구에서는 다양한 센서로부터 실시간 데이터를 수집하고, 이 데이터를 바탕으로 환경 인식, 위치 추적, 경로 계획 및 로봇 제어를 수행하는 여러 토픽을 사용했다. Table 2는 자율주행 시 발행되는 주요 토픽과 메시지, 그 역할을 설명한다. 각 토픽은 특정한 메시지 형식으로 데이터를 주고받으며, 로봇의 자율주행과 요소 기술들을 구현하기 위해 활용된다.
Table 2.
Topics and messages published during autonomous navigation
2.3 현장 실험
2.3.1 실험 환경
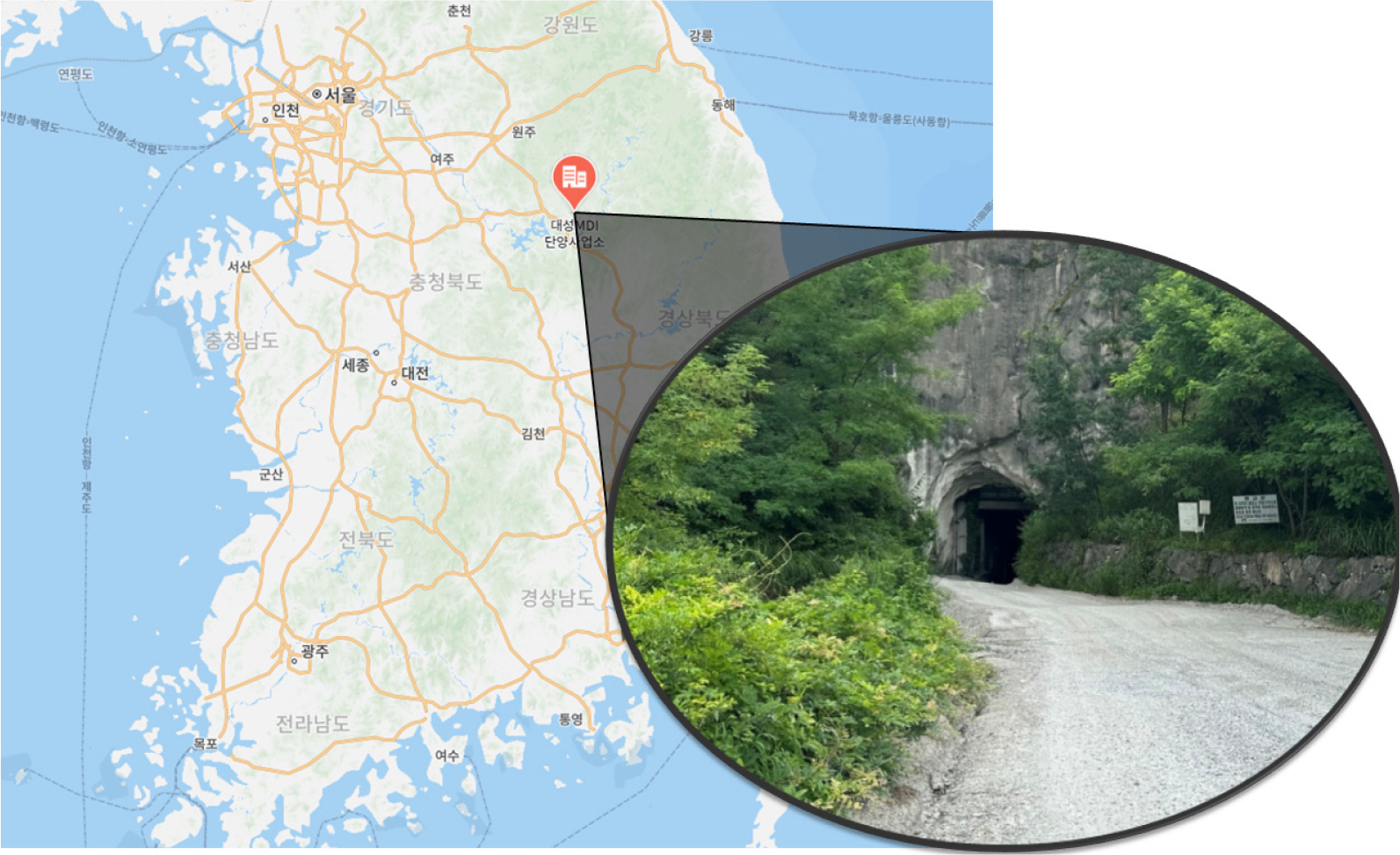
본 연구는 충북 단양군에 있는 석회석 광산 대성 MDI에서 실험을 진행하였으며, Fig. 6은 광산의 위치와 광산 입구를 나타낸다. 안전상의 이유로 차량이 다니지 않는 지하 대피소에서 수행했다. 이 구간은 차량이 없어 같은 조건에서 실험할 수 있기에 실험 장소로 선정하였으며, 로봇의 조향 메커니즘별 주행 성능을 평가할 수 있었다. Fig. 7은 실험 환경을 나타낸다. 이 지면은 차량의 바퀴 자국과 천정으로부터 떨어진 물로 인해 땅이 파여 지름이 작게는 1 cm에서 크게는 10 cm 크기에 홀이 생겼고, 물이 고여있는 상태였다. 이러한 거친 지면 상태로 인해 바퀴의 슬립 현상이 나타났고, 주행 경로의 오차를 유발하는 주요 요인으로 작용하였다. 실험 구간은 대피소 내 약 7 m 평지 구간이다. 레이저는 50 cm, LED 조명은 1 m 간격으로 설치하여 그리드를 만들었으며, 이를 통해 로봇의 주행 경로를 시각적으로 추적하고, 로봇의 위치 오차를 정밀하게 측정할 수 있었다.

2.3.2 실험 방법
먼저 로봇의 주행과 바퀴의 슬립을 정확하게 파악하기 위해 조명을 사용하여 지하 광산의 어두운 실험 환경을 밝혔으며, 레이저와 LED 조명을 이용하여 형성한 그리드를 통해 로봇의 위치를 파악하고자 했다. 본 실험에서는 GMapping 알고리즘을 사용해 사전 지도작성을 진행하였으며, 같은 출발지와 목적지를 설정하여 조향 메커니즘별로 자율주행을 통해 약 7 m 거리를 자율 주행하였다. Fig. 8은 ROS의 시각화 도구인 RVIZ 화면을 보여준다. 화면의 오른쪽 부분은 실험 지역의 지도를 나타내고 있으며, 빨간 점은 LiDAR가 감지한 물체를, 핑크색 선은 로봇이 설정한 자율주행 경로를 나타낸다. 또한, ROS의 ‘rosbag’ 기능을 이용하여 실시간으로 주행 중에 발행되는 AMCL, Odom, cmd_vel 토픽을 함께 기록하였고, 추후 실제 위치와 로봇의 위치를 비교하는 데 사용하였다.
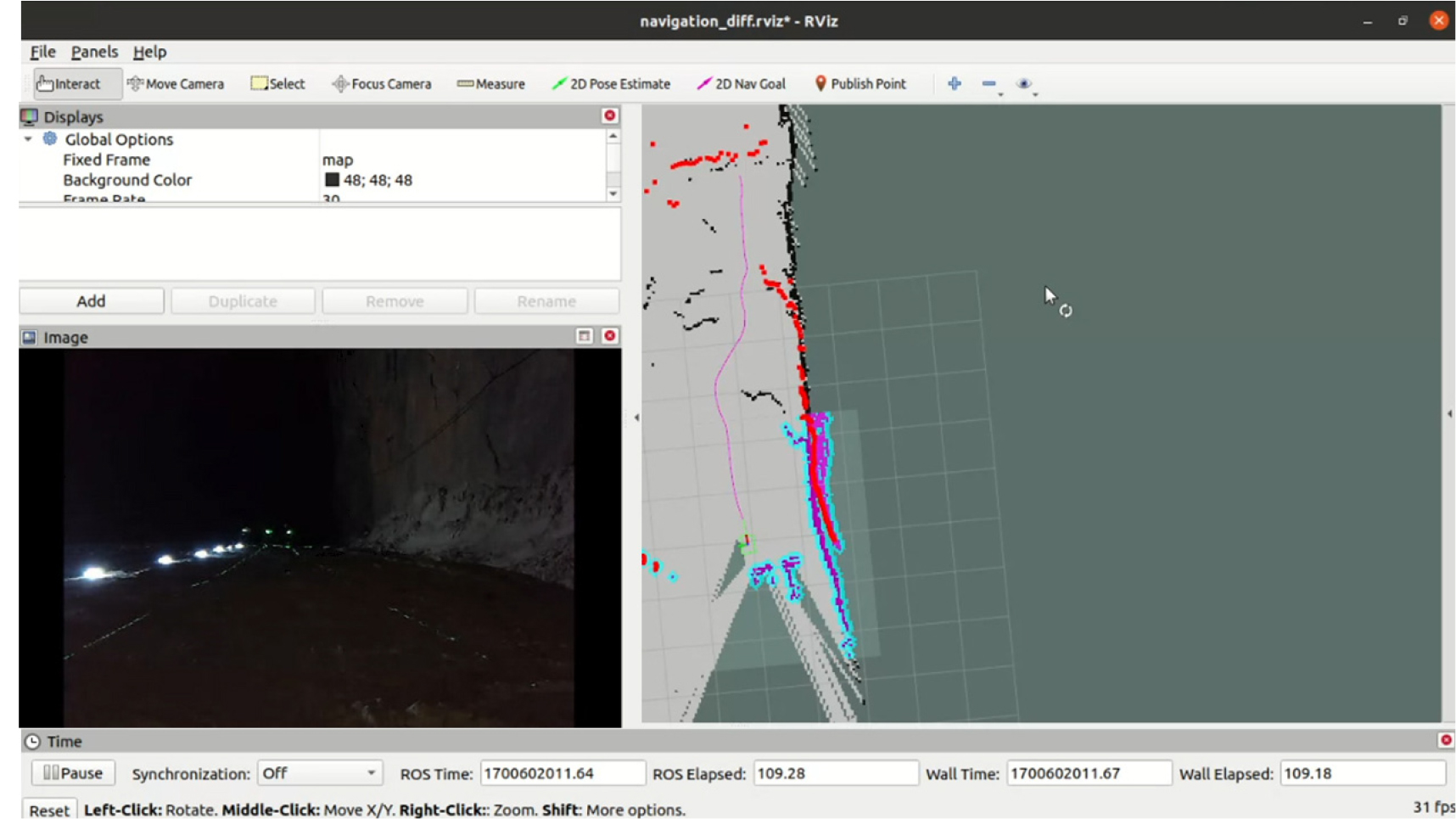
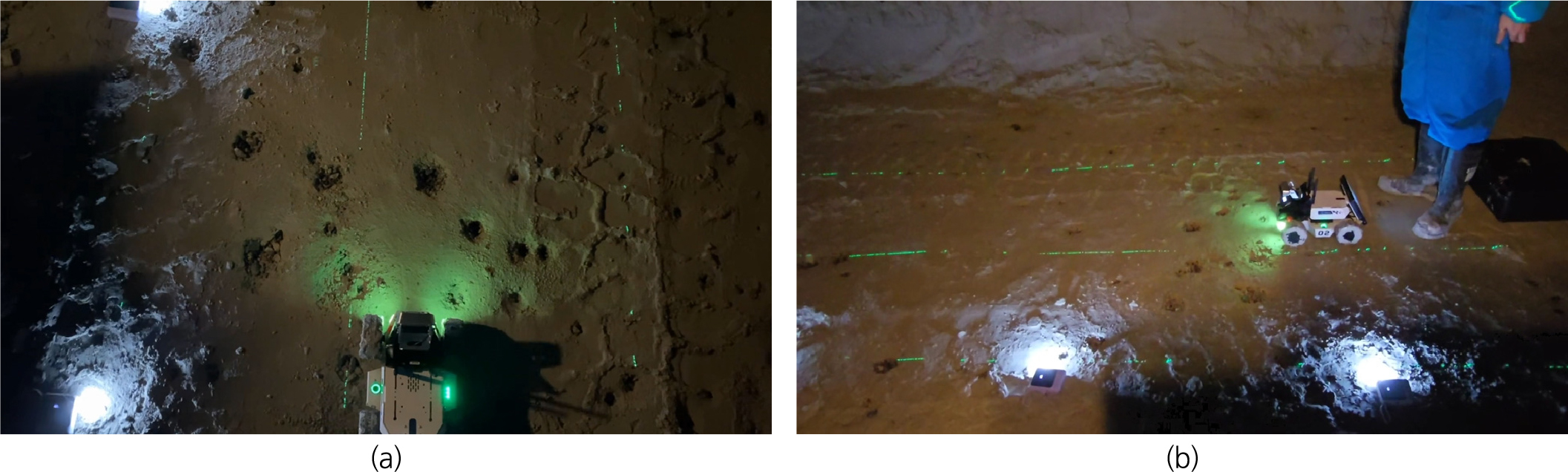
Fig. 9는 주행 중 사진을 나타낸다. 측면 카메라는 구간 전체적인 지형의 특성을 파악하고 바퀴의 슬립 현상을 확인하였으며, 상부 카메라는 로봇의 전체적인 주행 경로와 양쪽 바퀴의 슬립을 파악하기 위해 녹화를 하였다. 이러한 영상 데이터는 후속 분석에서 바퀴 슬립이 발생한 시점과 원인을 명확하게 식별하는 데 사용되었다. 이후 분석에서는 영상 기반으로 측정한 실제 위치와 AMCL 추정 위치 간의 거리 차이를 기반으로 위치에 대한 평균 제곱근 오차(Root Mean Square Error, RMSE)를 산정하였다. 산출된 RMSE 값은 로봇 크기 및 실험 환경을 고려하여 주행 성능을 평가하는 기준으로 활용되었다.
3. 연구결과
3.1 현장 실험 결과
본 연구는 지하 험지에서 다양한 조향 메커니즘을 적용하여 같은 구간을 자율주행으로 주행한 후, 각 지형 조건에서 발생하는 위치 오차와 경로 오차를 분석하여 조향 방식의 성능을 비교하였다. 특히, 지형 및 지면 조건에 따른 조향 방식의 특성을 평가하고, 오차가 크게 발생하는 지형을 식별함으로써 각 조향 메커니즘의 성능을 파악하는 데 초점을 맞추었다. 자율주행 중 다양한 요인에 의해 발생하는 바퀴의 슬립은 헤딩 각도에 변화를 일으켰고, 이는 위치 오차에 영향을 미치는 것으로 나타났다.
3.1.1 Ackermann 조향 실험 결과
먼저 Ackermann 조향의 경우 다른 조향 메커니즘에 비해 빠른 속도로 주행했다. 전체 주행 시간은 7초가 걸렸고 주행거리는 7.29 m이다. 전체적인 양상으로는 주행 중반 이후부터 우측(-)으로 편향되어 주행했고, 이 때문에 슬립이 증가해 오차가 증가한 것으로 확인되었다. Fig. 10은 주행 중 헤딩 변화가 크게 발생했을 시점의 사진들이다. 헤딩 변화는 4 ∼ 5.5초 구간과 6.5 ∼ 7초 구간에서 크게 나타났다. 4초대에서는 약간의 내리막길에서 오른쪽으로 조향 중 관성으로 인해 오른쪽으로 10.86° 회전하였다. 4.5 ∼ 5초대에서는 높은 속도와 고르지 않은 표면으로 접지력 부족으로 인해 왼쪽 바퀴 슬립 발생해 왼쪽으로 각각 6.44°, 7.7° 회전했다. 5.5초대에서는 내리막길에서 직진 주행 중 왼쪽으로 조향하려 했으나, 관성으로 인해 오른쪽으로 12.28° 회전했다. 이런 연속적인 헤딩 각도의 변화는 위치 오차에도 큰 영향을 미쳤다.
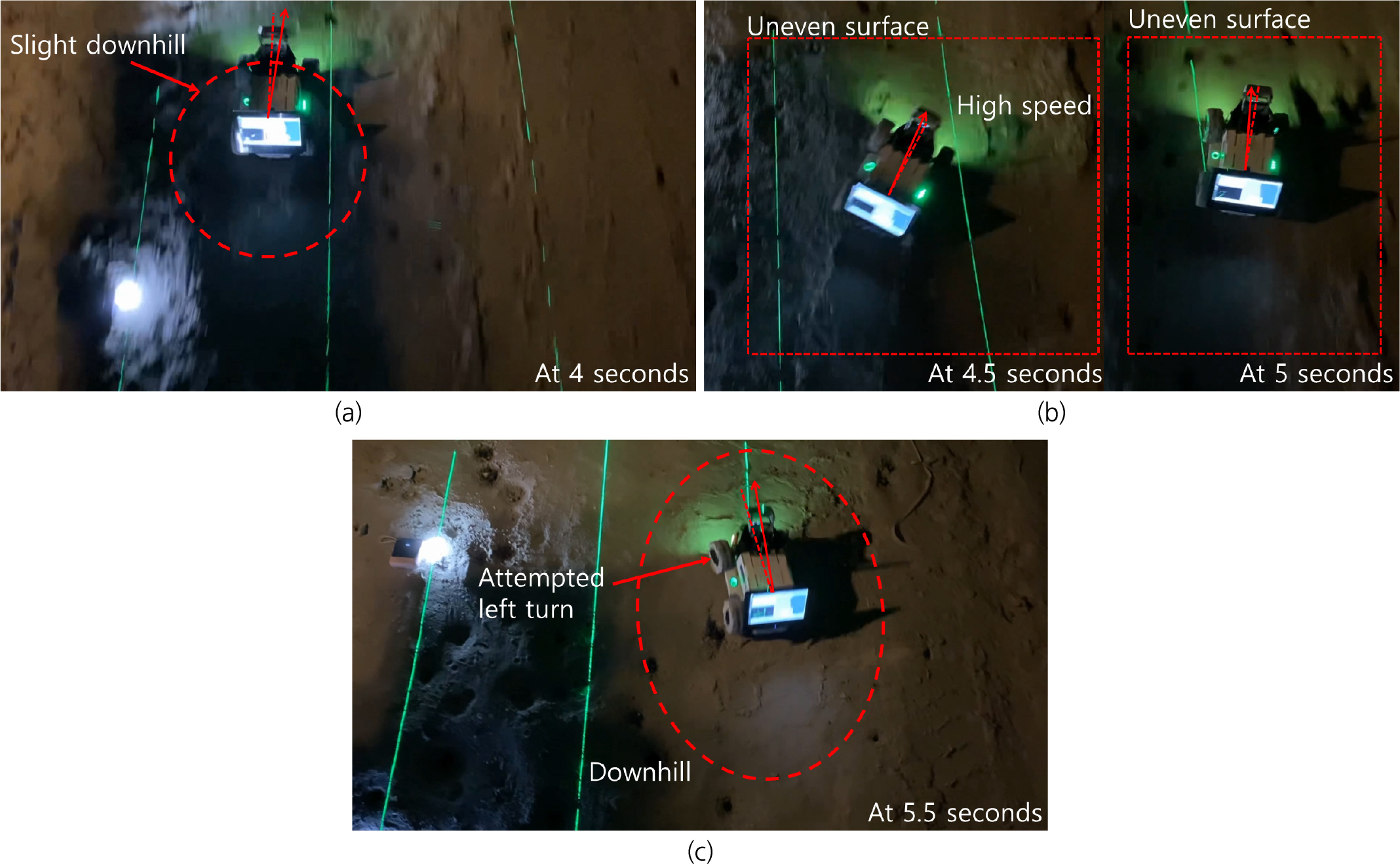
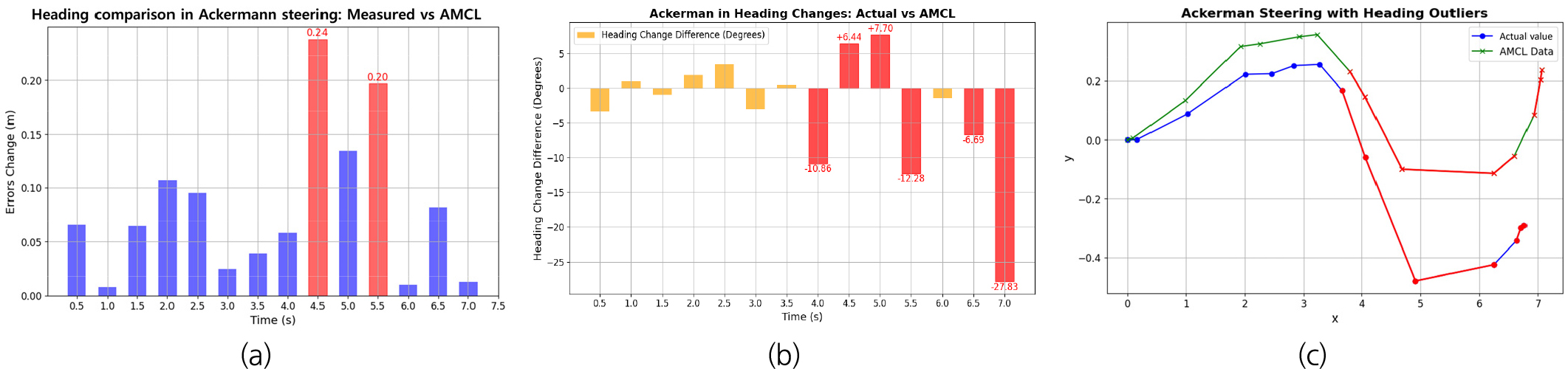
위치 오차가 큰 부분은 헤딩 오차가 발생한 이후 시점인 4.5 ∼ 5.5초대로, 각각 0.24 m, 0.13 m, 0.20 m의 위치 오차가 발생했음을 확인할 수 있었다. 마지막으로 6.5 ∼ 7초 구간에서는 오른쪽으로 각각 0.69°, 27.83°로 큰 헤딩 변화율을 보였으나, 이 구간에서는 위치 오차에 큰 영향을 미치지 않았다. 이는 로봇이 목적지에 거의 도달하여 낮은 속도로 주행 중 경로 수정을 할 때 제동 과정에서의 슬립과 목적지에 도달 후 헤딩 각도 변환 중에 발생한 슬립이었다. 이는 낮은 속도로 인해 위치 오차에 큰 영향을 주지 않은 것으로 나타났다.
Fig. 11(a)와 Fig. 11(b)는 시간에 따른 헤딩 변화와 위치 오차를 나타낸다. 이때 Fig. 11(a), (b) 그래프에서 붉은색으로 강조된 구간은 오차 변화량의 평균보다 1.2배 이상의 표준편차를 초과한 시점으로, 바퀴 슬립 또는 접지 불균형으로 인한 급격한 오차 발생 구간(outlier)을 나타낸다. Fig. 11(c)을 통해 Ackermann 조향 방식은 낮은 속도로 곡선 주행을 할 때 유리하지만, 전체 주행에 대한 위치 RMSE 값이 0.2805 m로 측정되어, 커브 중 불균일한 표면으로 인한 접지력 저하로 인해 최대 24 cm의 위치 오차가 발생하였고, 정확한 경로를 따르기 어려워지게 한다는 것을 확인할 수 있었다.
3.1.2 Differential 조향 실험 결과
Differential 조향의 경우 전체 주행 시간은 11초가 걸렸고, 주행거리는 7.39 m이다. 헤딩 변화의 전체적인 양상은 비교적 작은 값으로 +, - 즉 좌측과 우측이 반복되어 나타났다. 이는 지형에 의한 슬립이나 조향 메커니즘 특성에 의해 나타난 헤딩 변화가 위치 오차로 이어지지 않고, 경로 복원으로 이어져 다른 조향 메커니즘보다 위치 오차를 적게 나타내는 요인으로 확인되었다. Fig. 12는 주행 중 헤딩 변화가 크게 발생했을 시점의 사진들이다. 헤딩 변화가 크게 나타나는 시간은 6.5초대, 8.5 ∼ 9초대, 10초대, 11초대로 나타났다. 6.5초대에서는 직진 구간에서 왼쪽 앞바퀴에 슬립이 발생해 왼쪽으로 10.41° 회전했다. 8.5 ∼ 9초대에서는 내리막과 구덩이 진입 때 오른쪽 바퀴 슬립 발생하였고, 오른쪽 바퀴가 구덩이를 지나며 슬립이 발생해 왼쪽으로 치우치는 현상이 나타났다. 이로 인해 각각 오른쪽으로 10.84°, 왼쪽으로 23.28° 회전했다. 10초대에서는 경로 탐색을 위해 정지하며 슬립이 발생해 오른쪽으로 13.52° 회전했다. 마지막으로 11초대 목적지에서 헤딩 방향을 맞추기 위해 조향 중 표면 불균형으로 인해 왼쪽 바퀴 슬립 발생해 왼쪽으로 9.81° 회전했다.
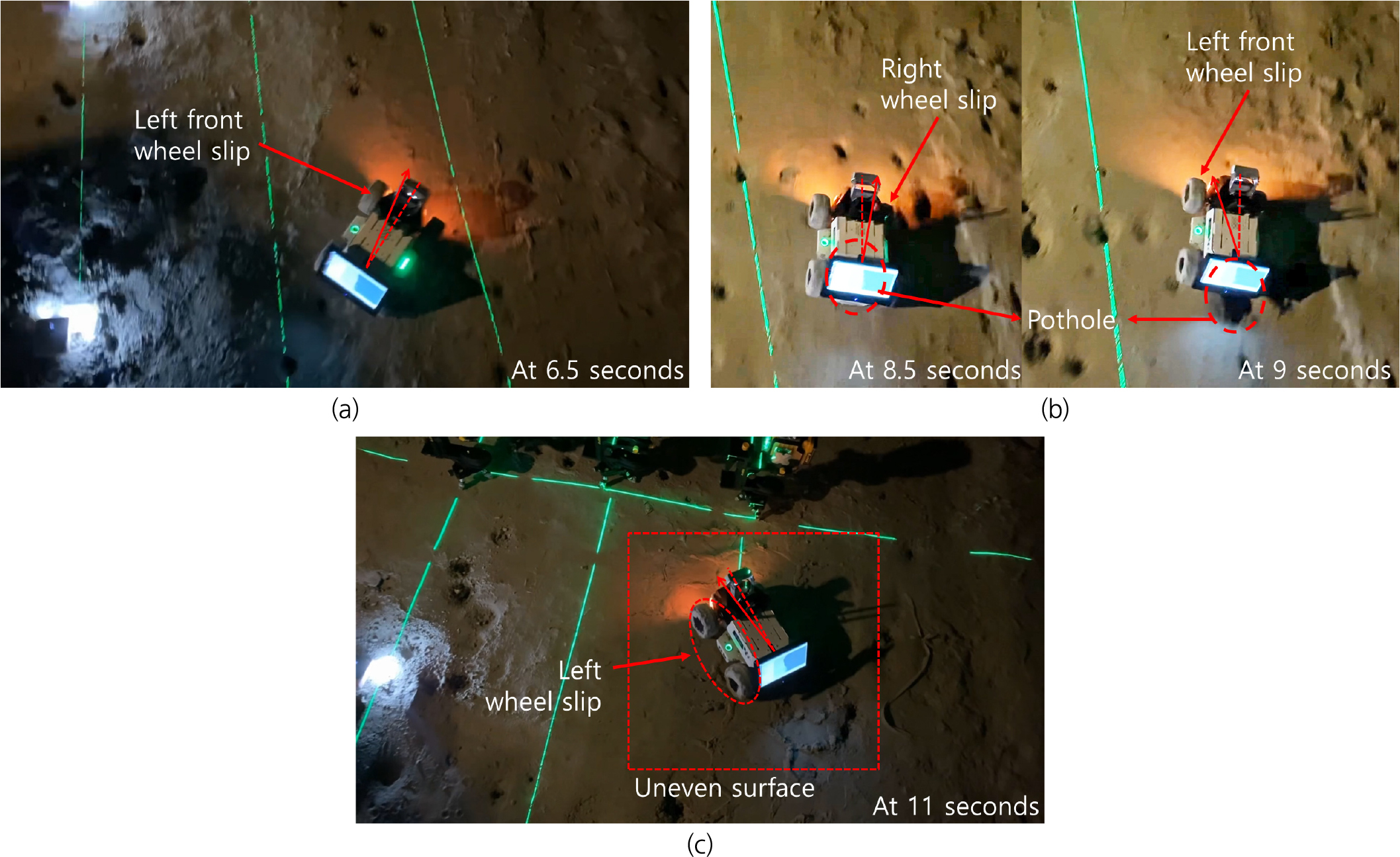
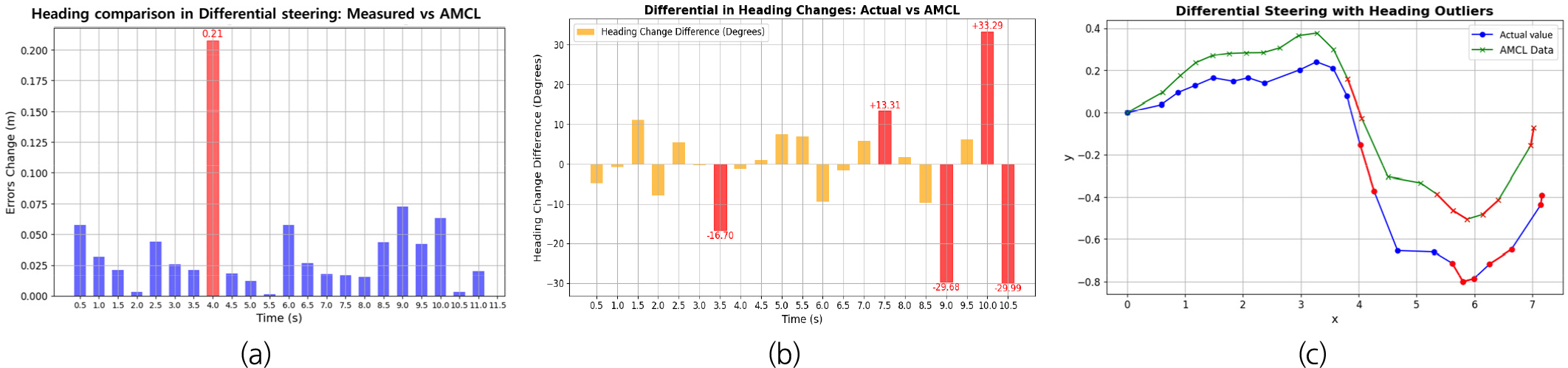
Fig. 13(a)과 Fig. 13(b)은 시간에 따른 헤딩 변화와 위치 오차를 나타낸다. Fig. 13(a), (b) 그래프에서 붉은색으로 강조된 구간은 오차 변화량의 평균보다 1.2배 이상의 표준편차를 초과한 시점으로, 바퀴 슬립 또는 접지 불균형으로 인한 급격한 오차 발생 구간(outlier)을 나타낸다. 이때 위치 오차가 많이 발생하는 시간은 4초대이다. 이는 직선 중에는 좌우 바퀴의 속도 차이가 크지 않을 때 3.5초대에 발생한 헤딩 변화로 인해 경로와 차이가 발생해 오차가 비교적 눈에 띄게 나타났다. 반면, 커브 구간에서는 바퀴의 좌우 속도 차이와 슬립으로 인해 큰 헤딩 변화가 있었으나, 경로 복원으로 이어져 위치 오차가 크게 발생하지 않았다. Differential 조향 메커니즘은 특성상 주행 중 헤딩 변화율이 크게 변화한다. Fig. 13(c)를 보면 직선 주행의 경우 헤딩 변화로 인해 경로에서 잠깐 벗어나기도 했으나, 커브를 도는 과정에서는 헤딩 오차가 컸음에도 불구하고 경로를 잘 따라가 위치 오차가 크게 나타나지 않았다. 전체 주행에 대한 위치에 대한 RMSE 값이 0.2311 m로 측정되어, 다른 조향 메커니즘보다 위치 정확도가 높은 것으로 나타났다.
3.1.3 Tracked 조향 실험 결과
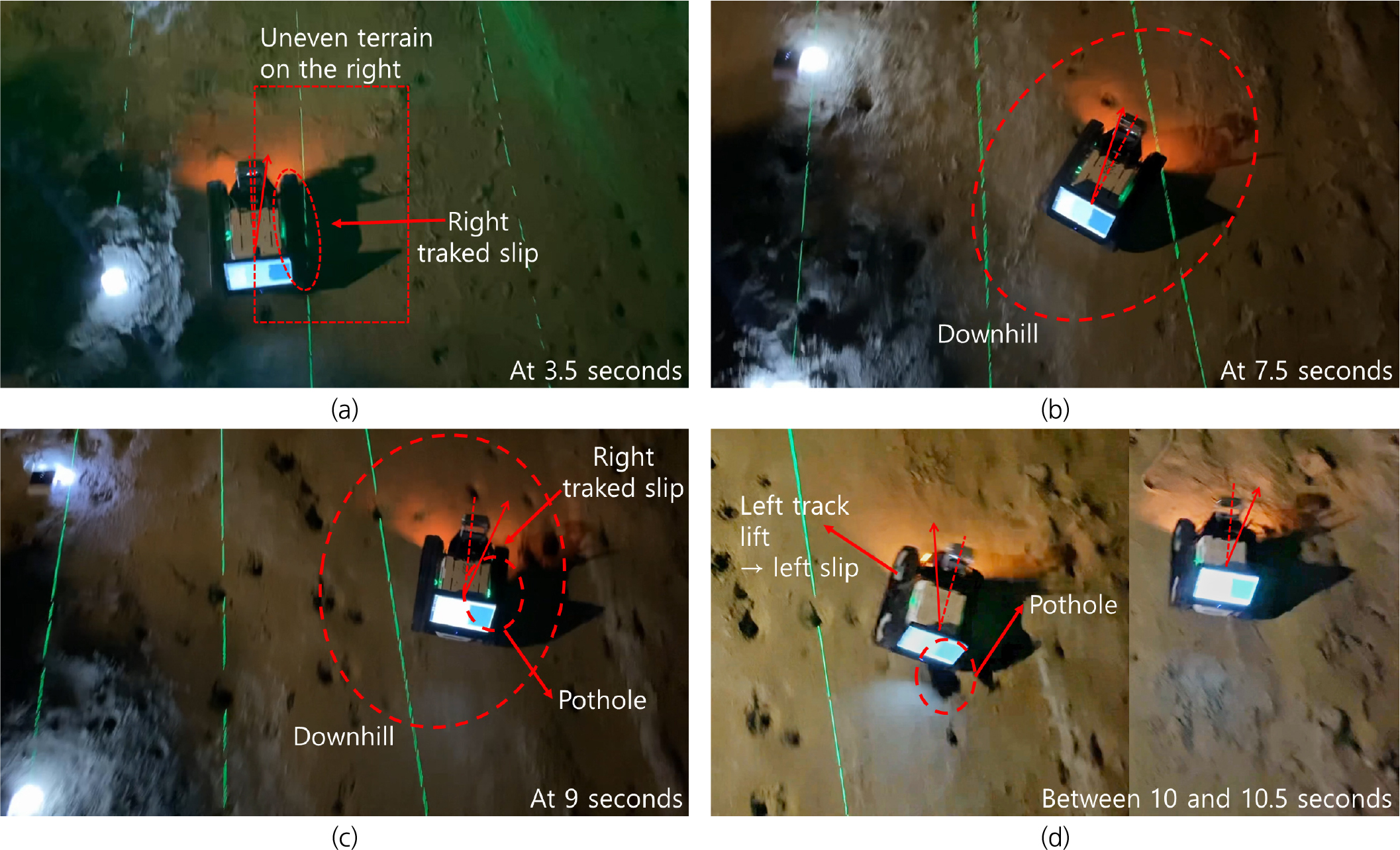
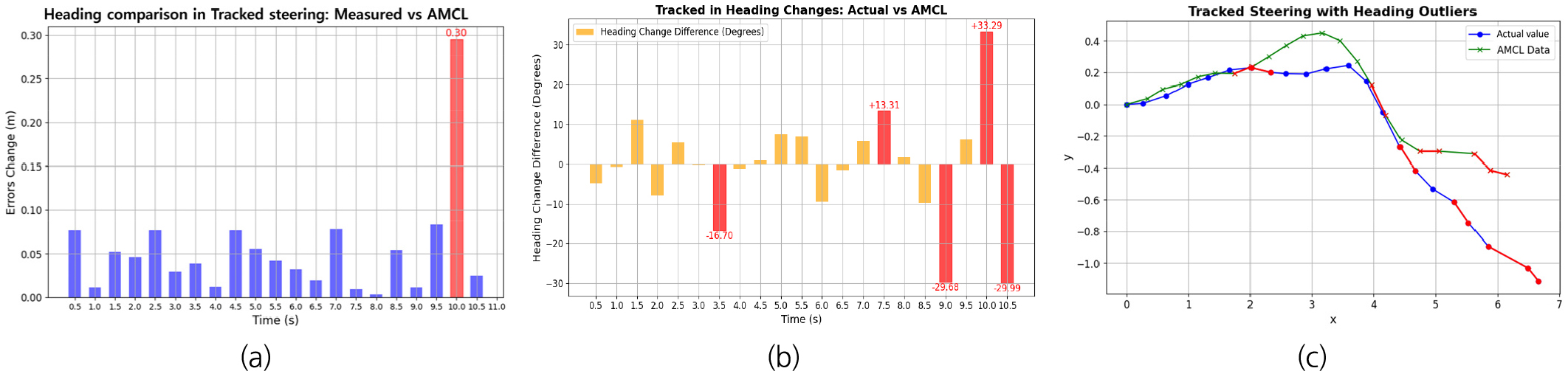
Tracked 조향의 경우 전체 주행 시간은 10.5초가 걸렸고 주행거리는 6.40 m였다. 전체적으로는 비교적 큰 각도로 좌측과 우측을 반복하며 주행한 것을 알 수 있다. 이는 다른 조향 메커니즘보다 조향의 변화가 커서 자율주행 시 세밀한 방향 조정이 어렵다는 것을 의미한다. 이로 인해 경로 복원이 어려워 경로 차이 발생한 것으로 해석할 수 있다. Fig. 14는 주행 중 헤딩 변화가 크게 발생했을 시점의 사진들이다. 헤딩 변화가 크게 나타나는 시간은 3.5초대, 7.5초대, 9초대, 10 ~ 10.5초대였다. 3.5초대에서는 초반부터 헤딩 변화가 왼쪽으로 치우쳐짐에 따라 경로 오차가 생기기 시작했으며, 오른쪽 지형 불균형으로 인해 오른쪽 트랙에 슬립 발생하여 오른쪽으로 16.7° 회전했다. 7.5초대에서는 왼쪽으로 살짝 조향한 후 내리막으로 가면서 관성에 의해 왼쪽으로 더 회전하게 되어 왼쪽으로 13.31° 더 회전했다. 9초대에서는 내리막과 큰 웅덩이로 인해 오른쪽 트랙에 슬립이 크게 발생하여 오른쪽으로 29.68° 회전했다. 10~10.5초대에서는 구덩이를 지나며 왼쪽 트랙이 들뜨고 왼쪽 슬립 발생하였다.
목적지 도착 후 최종 헤딩 각도를 맞추기 위해 회전할 때 속도 제어가 민감하게 반응해 큰 오차가 발생하였으며, 각각 왼쪽으로 33.29°, 오른쪽으로 29.99° 회전하였다. Fig. 15(a)과 Fig. 15(b)은 시간에 따른 헤딩 변화와 위치 오차를 나타낸다. 이때 Fig. 15(a), (b) 그래프에서 붉은색으로 강조된 구간은 오차 변화량의 평균보다 1.2배 이상의 표준편차를 초과한 시점으로, 바퀴 슬립 또는 접지 불균형으로 인한 급격한 오차 발생 구간(outlier)을 나타낸다. 위치 오차는 헤딩 변화가 가장 큰 부분인 10초대에 경사면과 구덩이와 같은 불규칙한 지형에서 접지력이 순간적으로 낮아져 트랙의 미끄러짐으로 인해 경로 이탈로 인해 발생하였다. Tracked 조향은 다른 조향 메커니즘에 비해 넓은 접지 면적으로 험지에서 우수한 주행 능력을 보인다. 하지만 Fig. 15(c)를 보면 자율주행 시 접지력과 구동 저항으로 인해 낮은 선형 속도를 보이고, 회전 저항이 커 세밀한 조향이 어렵다는 것을 확인할 수 있었다. 또한, 험지 지형에서 순간적인 접지력 손실이 슬립의 원인으로 작용해 큰 경로 오차를 보였다. 이로 인해 전체 주행에 대한 위치에 대한 RMSE 값이 0.3119 m로 측정되었으며, 이는 다른 조향 메커니즘보다 위치 정확도가 낮은 것으로 나타났다.
4. 토 의
4.1 시뮬레이션 기반 조향 메커니즘 분석
이 연구에서는 Ackermann, differential, tracked 조향 메커니즘을 사용한 자율주행 로봇의 직진 주행 중 슬립 현상을 가정하여 시뮬레이션을 수행하고, 그 결과를 현장 실험 데이터와 비교하여 각 조향 방식의 성능을 평가하였다. 속도 데이터는 현장 실험의 cmd_vel 토픽 기록을 사용하였다. 시뮬레이션에서는 15.6초 동안 직진 주행을 할 때 좌우 바퀴에 랜덤한 슬립을 적용하여 경로 오차와 위치 오차를 분석하였으며, 현장 실험에서는 실제 지형의 변화와 곡선 경로의 영향을 분석하였다.
Fig. 16(a), (b), (c)는 슬립으로 인해 경로 오차가 발생하는 구간 중 속도 차이가 크게 발생한 시점의 위치 그래프와 바퀴의 선형 속도를 나타낸다. 위치 그래프의 빨간 선은 오차가 발생한 위치를 나타낸다. 슬립으로 인해 바퀴 간 속도 차이가 생겨 각속도가 발생하며, 이로 인해 헤딩 변화가 생겨 슬립이 일어나지 않을 때와 비교했을 때 경로 오차가 발생한다.
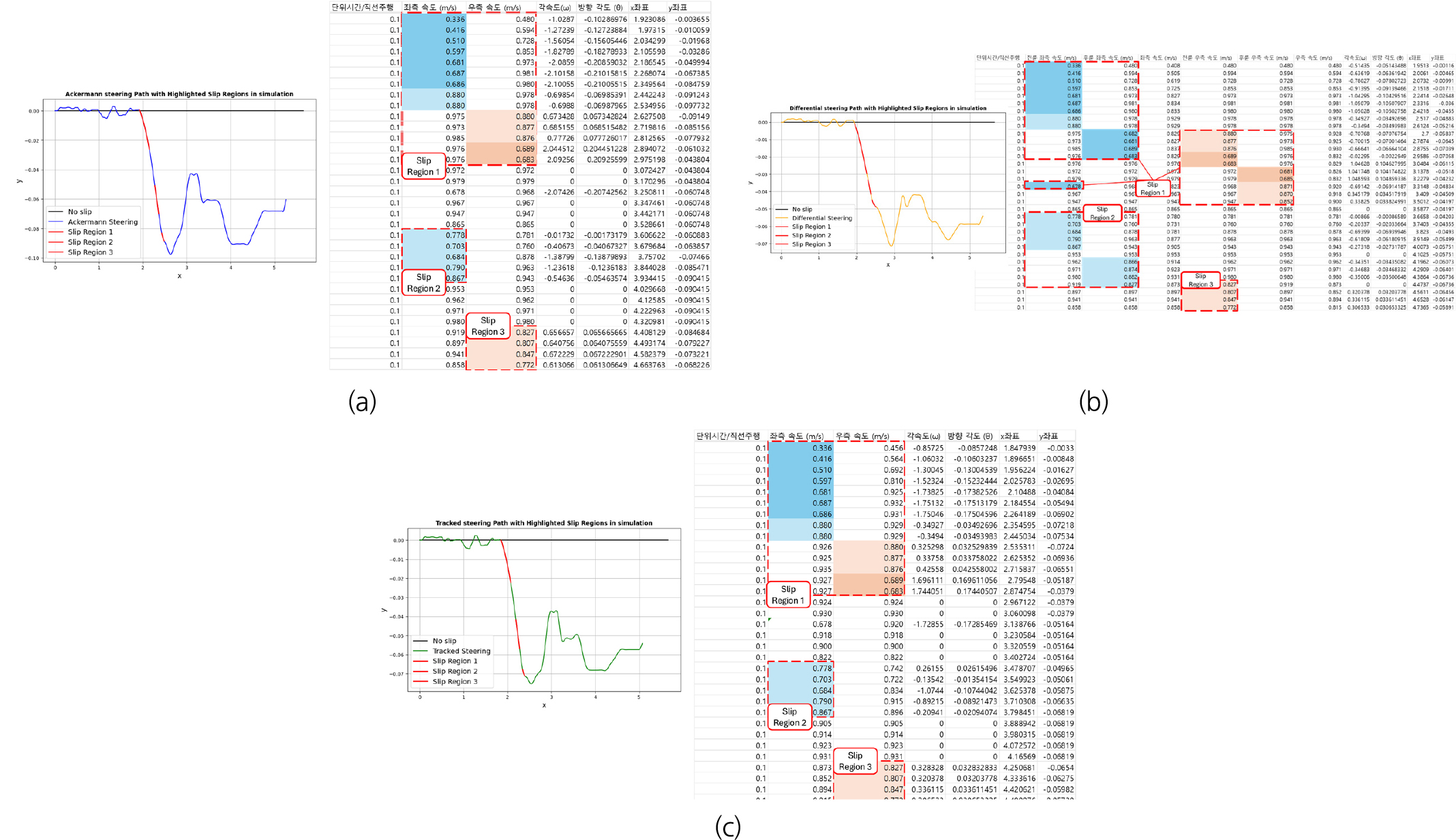
Fig. 16.
Comparison of steering mechanisms in simulation with slip section analysis: (a) Ackermann steering: simulated path and slip section data, (b) differential steering: simulated path and slip section data, (c) tracked steering: simulated path and slip section data. In each case, slip sections are highlighted in the trajectory and corresponding data table for quantitative comparison
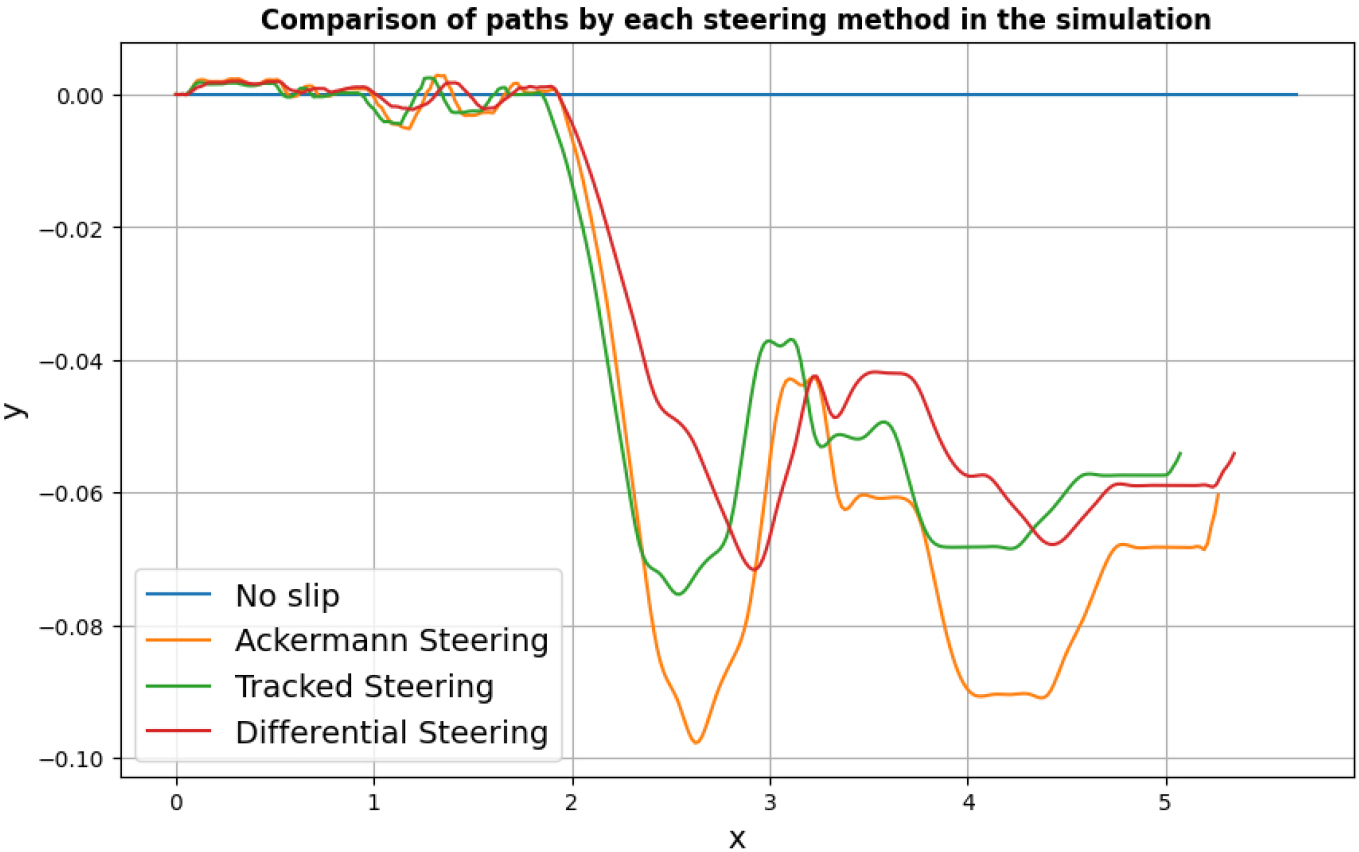
Fig. 17은 Ackermann, differential, tracked 조향 메커니즘을 비교한 시뮬레이션 및 실험 경로를 나타낸다. Fig. 17에서 초반 슬립은 느린 속도에서 발생했기 때문에 위치 오차에 큰 영향을 주지 않았다. 반면, 2 m 이후 빠른 속도로 이동하기 시작하면서 발생한 슬립은 위치 오차에 큰 영향을 미친 것을 확인할 수 있다. 또한, 그래프에서 확인할 수 있듯이, 시뮬레이션에서는 Ackermann 조향과 tracked 조향 모두 같은 경로에서 좌측 또는 우측의 슬립이 발생할 때 비슷한 패턴의 오차를 나타냈다. 이는 트랙이 바퀴보다 넓은 접지 면적을 가졌지만, 직선 주행 시 슬립 발생 패턴은 유사했기 때문이다. 다만, tracked 조향에서는 접지 면적이 넓어 구동 저항이 증가하면서 선형 속도가 느려졌기 때문에 실제 이동한 거리는 Ackermann 조향보다 적게 나타났다. 따라서 시뮬레이션 상에서 두 조향 방식의 경로 오차는 유사했지만, tracked 조향은 덜 이동한 것으로 해석되었다. 하지만 현장 실험에서는 지형의 변화와 곡선 경로로 인해 Ackermann 조향과 tracked 조향 간의 차이가 더 명확하게 드러났다. 특히, Ackermann 조향은 곡선 구간에서 접지력 감소로 인해 위치 오차가 더 크게 발생하였지만, tracked 조향은 넓은 접지 면적 덕분에 안정적인 주행 성능을 보였다. 이러한 차이는 현장에서의 경로가 곡선인 점과, 불규칙한 지형으로 인해 접지 상태가 일정하지 않았던 점에서 기인한 것으로 보인다. Differential 조향 방식은 시뮬레이션에서 네 바퀴에 각각 슬립을 적용하여 오차를 분석한 결과, Ackermann 및 tracked 방식보다 상대적으로 더 높은 경로 복원 성능을 보였다. 이는 각 바퀴의 독립적인 속도 제어가 가능하여, 주행 중 슬립이 발생하더라도 경로 복원이 빠르게 이루어졌기 때문이다.
시뮬레이션에서는 네 바퀴 모두 슬립을 적용하여 선형 속도를 조정했지만, differential 방식의 주행 성능은 오차가 적은 경향을 보였다. 현장 실험에서는 지형의 영향과 조향 방식의 영향을 더 크게 받았다. 지하 광산의 불규칙한 표면과 경사로에서 differential 조향은 직진 주행 시 접지력이 불안정해지거나 좌우 바퀴의 속도 차이로 인해 헤딩 변화로 큰 위치 오차가 발생하였다. 이는 시뮬레이션에서는 바퀴가 완벽하게 접지하는 상태를 가정했고, 좌우 바퀴가 같은 속도로 주행한다고 가정했지만, 실제 현장에서는 각 바퀴가 접지하지 못하는 상황이 빈번하게 발생하고, 좌우 속도 차이가 존재해 나타난 결과로 해석된다.
4.2 시뮬레이션 결과와 현장 실험 결과의 비교
결론적으로, 시뮬레이션에서는 각 조향 방식이 직선 주행 중 슬립이 발생 시 유사한 오차 패턴을 보였으며, Table 3과 같이 RMSE 분석 결과 시뮬레이션에서는 비교적 낮은 오차를 보였으나, 현장 실험에서는 시뮬레이션보다 약 7~10배 오차가 증가하였다. 이는 실제 고르지 않은 지형과 곡선 경로의 영향으로 인해 각 조향 방식의 성능 차이가 더 두드러지게 나타난 것으로 판단된다.
5. 결 론
본 연구의 목적은 Ackermann, differential, tracked 조향 메커니즘을 이용한 자율주행 로봇의 성능을 지하 험지 환경 조건에서 비교 분석하는 것이다. 세 조향 방식 모두 약 7 m 구간을 자율주행 하며 RMSE가 약 0.2~0.3 m 수준으로 측정되었다. 이는 주행거리의 약 2.9~4.29%에 해당한다. 연구 결과 Ackermann 조향 방식은 낮은 속도에서 곡선 주행 시 안정적인 성능을 보여, 주행 중 정확한 경로 유지에 강점을 지닌다는 것이 확인되었다. Differential 조향 방식은 다양한 지형에서 경로 복원 성능이 우수하여 동적 환경에서 자율주행 성능을 크게 향상시킬 수 있었다. Tracked 조향은 험지에서 주행 안정성을 대폭 개선하여, 지하 광산과 같은 특수 환경에서도 유용하다는 것을 확인할 수 있었다.
기존 지하 광산용 로봇의 연구 사례들의 경우 로봇의 위치 추정 오차를 최소화하기 위한 연구들은 있었지만, 다양한 조향 메커니즘들의 장단점을 비교, 분석한 사례는 없었다. 본 연구는 지하 광산과 같은 험지 환경에서 각 조향 메커니즘이 자율주행 로봇의 주행 성능에 어떻게 영향을 미치는지 구체적으로 비교 분석하였다는 점에서 중요한 의의를 지닌다. 특히, 실험을 통해 조향 메커니즘별 장단점을 분석함으로써, 지하 광산과 같은 험지에서 자율주행 로봇을 활용할 때, 조향 제어 방법을 선정하기 위한 자료로 활용될 수 있을 것이다.
더 나아가, 본 연구에서 도출된 결과를 통해 지하 광산뿐만 아니라 군사 및 방위 산업, 재난 상황, 건설 산업과 같은 다양한 산업 분야에서도 활용될 수 있다. 험지 환경에서 자율주행 로봇의 성능을 향상시키기 위한 조향 메커니즘의 이해는 복잡한 지형 조건에서의 로봇 운용에 중요한 기초 자료가 될 수 있으며, 이를 바탕으로 다양한 응용 분야에서 자율주행 성능 개선에 기여할 수 있을 것이다.
본 연구에서는 2D LiDAR, 휠 엔코더, IMU 등의 센서들을 활용하여 로봇의 위치 인식 정확도를 분석하였다. 그러나 최근에는 로봇의 위치를 추정하기 위해 3D LiDAR, Depth 카메라, ICP (Iterative Closet Point) 등의 기술들이 활용되고 있다. 앞으로는 기존의 위치 추정 기술과 새로운 기술들이 융합되어 적용되었을 때 위치 추정 정확도에 대한 분석이 수행되어야 할 것이다. 또한, 실험에서 세 가지 조향 메커니즘을 자유롭게 바꿀 수 있는 로봇을 사용하여 동일한 조건에서 실험을 진행하였다. 하지만, 로봇의 낮은 차체로 인해 높이가 높은 장애물이 있는 험지 지형이나 지면이 고르지 않은 급경사로 지형에서는 차체 하단이 간섭을 받아 실험을 진행하지 못하였으며, 이로 인해 다양한 지형에서의 성능을 충분히 평가하기 어려웠다는 한계가 있었다.
본 실험은 지하광산 내 평탄한 구간을 중심으로 진행되었다. 이에 향후 연구에서는 경사, 암반과 같은 장애물이 존재하는 조건 등 다양한 지형과 환경에서의 추가 실험을 통해 각 조향 방식의 성능을 더욱 정확히 평가해야 한다. 또한, 실시간 지면 상태 감지와 조향 방식 자동 전환 시스템을 도입해, 각 환경에 맞는 최적의 조향 방식을 선택하여 자율주행 성능을 극대화할 필요가 있다. 본 연구는 자율주행 로봇의 주행 성능을 향상시키기 위한 조향 메커니즘 선택에 중요한 기초 자료를 제공하며, 다양한 응용 분야에서 활용될 수 있을 것이다.
