

1. 서 론
2. 무인 적재 장비 개요
2.1 장비 유형별 정의
2.2 핵심 기술
2.3 광산 자동화 성숙도 모델
3. 글로벌 제조사의 무인 적재 장비 기술 동향
3.1 캐터필라(Caterpillar, 미국)
3.2 알씨티(RCT, 호주)
3.3 립헬(Liebherr, 독일)
3.4 볼보(Volvo, 스웨덴)
3.5 에피록(Epiroc, 스웨덴)
3.6 코마츠(Komatsu, 일본)
3.7 히타치(Hitachi, 일본)
3.8 HD 현대건설기계(HD Hyundai Construction Equipment, 대한민국)
4. 국내 광산의 무인 적재 장비 도입 사례
4.1 대성엠디아이(Daesung MDI) 단양사업소
4.2 삼양리소스(Samyang Resource) 관인광산
4.3 한일현대시멘트(Hanil Hyundai Cement) 영월광산
5. 토 의
5.1 기술적 특징
5.2 도입 효과
5.3 향후 발전 방향
6. 결 론
1. 서 론
광업은 높은 재해율과 열악한 작업 환경으로 인해 무인화 및 자동화 기술의 필요성이 특히 큰 산업 분야로 알려져 있다. 실제로 2018~2024년 동안 광업의 평균 재해율은 28.84%로 전체 산업 평균인 0.61%에 비해 현저히 높게 나타났으며(MOEL, 2025, Jin, 2023), 이는 작업자 안전 확보를 위한 기술적 개입의 시급성을 시사한다. 이러한 산업적 특성에 따라 안전사고 저감과 작업 효율 향상을 동시에 달성하기 위한 mining automation 기술 개발이 전 세계적으로 빠르게 확산되고 있다.
특히 노천광산의 적재·운반 공정은 전체 생산 주기에서 병목 구간으로 작용하며, 광산 운영 효율과 생산성을 좌우하는 핵심 단계로 평가된다(Aguayo et al., 2021). 이 공정은 전체 운영비의 약 35~55%를 차지할 정도로 비용 비중이 크고, 로더·굴착기·덤프트럭 등 중장비 간 상호작용이 빈번하게 발생하여 안전사고의 주요 원인으로 지목되어 왔다(Alarie and Gamache, 2002, Bakhtavar and Mahmoudi, 2020, Candia et al., 2010). 따라서 생산성 향상과 비용 절감뿐 아니라 작업자 안전 확보 측면에서도 적재·운반 공정의 무인화 및 자동화는 광산 무인화 전략에서 가장 중요한 기술 과제 중 하나로 간주된다.
이러한 배경에서 자율적재시스템(autonomous loading system)은 광산 무인화를 구성하는 핵심 요소로 주목받고 있다. 자율적재시스템은 로더(loader)나 굴착기(excavator)와 같은 적재 장비를 작업자 탑승 없이 원격 또는 자율적으로 제어하는 기술 체계로, 운용 방식에 따라 세 가지 유형으로 구분될 수 있다. 먼저 원격 제어(remote control, RC)는 작업자가 장비 인근에서 원격으로 조작하는 방식으로, 위험 노출을 낮출 수 있으나 작업 시야 제한으로 인해 정밀도 저하 가능성이 존재한다. 다음으로 원격 조종(teleoperation)은 작업자가 별도의 제어실에서 카메라 또는 각종 센서를 기반으로 장비를 조작하는 방식으로, 장비 접근이 불필요하고 안전성이 높다는 장점이 있다. 마지막으로 자율주행(autonomous driving)은 장비가 센서·통신·제어 기술을 활용해 스스로 주행 및 적재 작업을 수행하는 방식으로, 완전 무인화를 실현하기 위한 핵심 기술로 평가된다.
최근 무인 로더 분야의 연구는 자율 작업 성능 향상, 주행 안전성 확보, 운행 효율 최적화라는 세 가지 방향을 중심으로 발전하고 있다. Tampier et al.(2021)은 숙련 작업자의 작업 노하우를 알고리즘화하여 평균 90%의 버킷 채움률을 달성한 자율 상차 시스템을 제시하였고, Backman et al.(2021)은 심층 강화학습(deep reinforcement learning)을 적용하여 로더가 시행착오를 통해 최적의 상차 전략을 학습하도록 하였다. 또한 Gu et al.(2022)은 지하 갱도 내 회전 구간에서의 안전한 3차원 경로계획 기법을 제안하였으며, Song et al.(2022)은 모델 예측 제어(model predictive control, MPC)를 통해 주행 안정성을 향상시켰다. 더 나아가 Zhao et al.(2022)은 강화학습 기반 제어로 인간 운전자 수준의 부드러운 주행을 구현하였고, Yu et al.(2025)은 기어 단수 선택 알고리즘을 활용하여 연료 효율을 최적화하는 방안을 제시하였다.
무인 굴착기 분야 역시 비정형 지형에서의 주행 안전성 확보와 작업 궤적 최적화를 중심으로 활발한 연구가 수행되고 있다. Guan et al.(2022)은 RGB 이미지와 3차원 포인트 클라우드를 융합해 실시간 지형 매핑이 가능한 TNS 시스템을 제안하였으며, Rasul et al.(2021)은 LiDAR 기반 객체 탐지와 움직임 예측을 통해 충돌 위험도를 사전에 평가하는 안전 알고리즘을 개발하였다. Zhang et al.(2021)은 LiDAR와 카메라를 결합한 다중 인식 기반 자율 굴착 시스템(autonomous excavator system, AES)을 구현하여 24시간 무인 작업이 가능한 수준의 생산성을 입증한 바 있다.
이처럼 무인 적재 장비에 대한 연구와 산업적 적용이 빠르게 확대되는 가운데, 본 연구는 글로벌 주요 제조사를 중심으로 광산용 무인 적재 장비의 기술 동향과 국내 도입 사례를 종합적으로 분석하고자 한다. 이를 통해 자율적재시스템의 개념과 핵심 구성 요소를 정립하고, 제조사별 기술 개발 현황을 기술적·산업적 관점에서 비교·검토함으로써 향후 광산 무인화 구현을 위한 기술 발전 방향과 시사점을 도출하고자 한다.
2. 무인 적재 장비 개요
2.1 장비 유형별 정의
무인 로더(unmanned loader)는 장비의 이동 및 제어를 무인화하여, 발파 과정을 거친 후 쌓여 있는 광석을 적재하기 위한 장비이다. 노천광산에서는 주로 휠로더(wheel loader)가 사용되고, 지하 광산에서는 저상형 로더(load haul dump, LHD)가 활용된다. 무인 로더는 버킷을 이용해 운반 트럭에 광석을 정밀하게 적재해야 하므로, 주로 원격 조종(teleoperation) 형태로 운용된다. 지하 광산 환경에서는 Wi-Fi 통신망을 기반으로 태블릿 기기를 이용하여 원격 제어가 이루어지며, 주행 공간이 협소하고 장비 간 이동이 제한적이기 때문에, 고도화된 자동화를 위해 조작자의 모션 피드백(motion force feedback) 시스템과 무인 트럭(unmanned truck)과의 무선 통신 시스템이 요구된다.
무인 굴착기(unmanned excavator)는 무인 로더와 마찬가지로 장비의 이동과 적재 제어를 자동화하여 운반 트럭에 광석을 적재하는 장비이며, 대부분 유압식으로 구동된다. 무인 굴착기는 주로 노천광산에서 운용되며, 붐(boom), 암(arm), 버킷(bucket) 등의 동작을 정밀하게 제어해야 하므로 현재는 주로 원격 조종(teleoperation) 방식으로 운용된다. 일반적으로 별도의 제어실에서 조이스틱과 콘솔을 사용해 장비를 실시간으로 제어하며, 일부 광산에서는 파쇄기 호퍼나 광석 투입구 주변에 고정식 무인 굴착기를 설치하여 안정적이고 연속적인 적재 작업을 수행한다.
2.2 핵심 기술
무인 적재 장비는 작업자의 탑승 없이 원격 또는 자율적으로 적재 작업을 수행하기 위해 공통적인 핵심 구성요소와 이를 기반으로 한 인식·제어·운영 관리 기술을 통합적으로 적용한다. 일반적으로 무인 적재 장비에는 조이스틱·콘솔 기반의 원격 조작 인터페이스, LiDAR·카메라·GPS 등 복합 센서 시스템, 그리고 Wi-Fi 등 무선 통신망이 필수 요소로 포함되며, 이들 기술은 장비의 실시간 제어와 안전한 작업 수행을 위한 기반을 이룬다.
먼저 조이스틱과 콘솔은 작업 현장과 분리된 장소에서 장비를 실시간으로 조작하기 위한 핵심 입력 장치로 기능한다. 이는 teleoperation 기반 무인 운용에서 가장 기본적인 제어 수단이며, 조작자의 명령을 정밀하게 전달함으로써 적재 작업의 연속성과 안정성을 확보한다. 특히 다자유도 작업부를 갖는 적재 장비의 특성상, 정교한 입력 인터페이스와 실시간 피드백 체계는 원격 환경에서도 작업자가 실제 탑승 운전과 유사한 조작 경험을 유지하도록 지원한다.
다음으로 LiDAR, 카메라, GPS로 구성되는 센서 시스템은 장비의 위치 인식과 주변 환경 인지를 담당한다. 이들 센서는 장비의 실시간 좌표 추정, 주변 객체 감지, 근접 거리 판단을 수행하며, 더 나아가 3차원 지형 매핑(3D terrain mapping), 장애물 회피(obstacle avoidance), 자동 정지(auto-stop)와 같은 고도 안전 기능 구현의 기반이 된다. 즉, 작업 구역 내 위험 요소를 실시간으로 탐지하고 필요 시 장비 동작을 제한하거나 정지시키는 방식으로 안전성을 확보하며, 카메라 기반 모니터링은 원격 조종 상황에서 작업자가 현장 상황을 실시간으로 확인할 수 있도록 한다.
무선 통신망은 이러한 원격 조작과 센서 데이터 처리 체계를 현장과 제어 시스템 간에 연계하는 핵심 인프라로, 무인 장비의 실시간 제어 및 데이터 송수신을 담당한다. 통신망을 통해 장비의 작동 상태, 연료 소비량, 생산성 지표와 같은 운영 데이터가 지속적으로 수집·전송되며, 이는 장비 운용 효율 최적화와 운영 관리 자동화 수준 향상에 활용된다. 결과적으로 무선 통신 기반의 데이터 통합과 분석 기능은 단일 장비의 무인화 수준을 넘어, 광산 전체 공정의 지능형 운영 체계를 구현하는 필수 요소로 작용한다.
이와 같은 기술적 기반 위에서 주요 제조사들은 자율 적재 시스템(autonomous loading system)의 인식 정확도와 작업 계획 능력, 그리고 운영 안정성을 지속적으로 고도화하고 있으며, 이를 통해 무인 적재 장비의 상용화 및 현장 적용 범위를 빠르게 확대하고 있다.
2.3 광산 자동화 성숙도 모델
본 연구에서는 무인 적재 장비의 자동화 수준을 객관적이고 일관된 기준으로 평가하기 위해 Global Mining Guidelines Group에서 제안한 Mining Automation Maturity Model (GMG, 2024)을 참조하였다(Fig. 1). 해당 모델은 SAE International(2018)이 제시한 운전자 조작 자동화 분류 체계를 토대로 구성되었으며, ISO 17757(2019)에서 정의한 표준 용어를 적용하여 광산 자동화의 성숙도를 단계적으로 구분한다. 이와 같은 국제 표준 기반의 수준 분류는 광산 현장에 도입되는 무인 적재 장비의 자동화 범위와 운영 특성을 체계적으로 비교·평가하는 데 유효한 기준으로 활용될 수 있다.
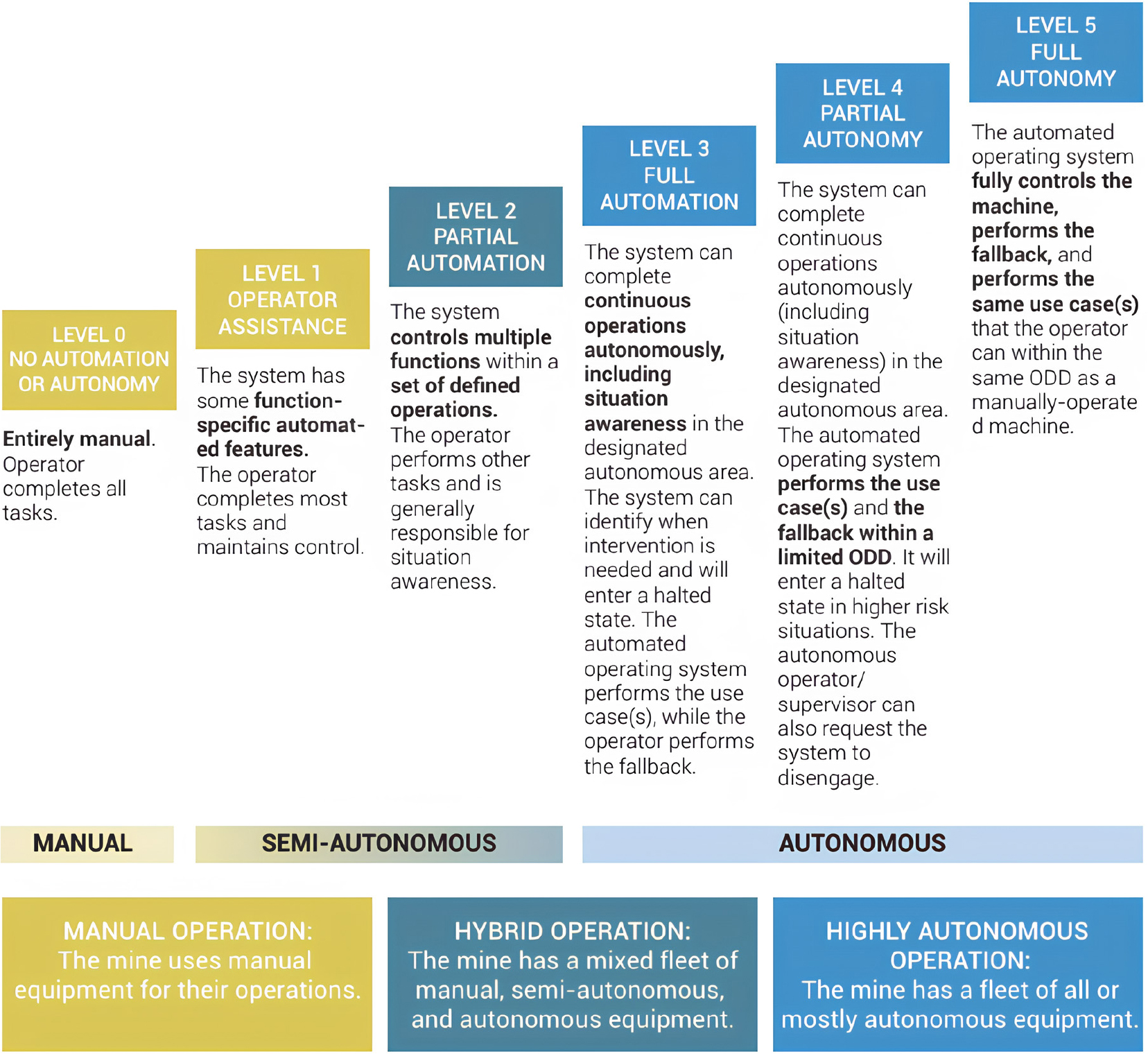
Mining Automation Maturity Model은 자동화 성숙도를 0단계부터 5단계까지 여섯 수준으로 정의한다. 0단계는 자동화 기능이 존재하지 않는 완전 수동 단계로, 장비의 모든 작업이 작업자에 의해 직접 수행된다. 1단계는 특정 기능에서 제한적 자동화를 제공하는 작업자 보조 수준으로, 일부 기능이 시스템에 의해 수행되더라도 전체 제어권과 작업 책임은 작업자에게 유지된다. 2단계는 시스템이 지정된 작업 영역 내에서 여러 기능을 동시에 제어할 수 있는 부분 자동화 단계이며, 작업자는 다른 작업을 수행할 수 있으나 상황 인식과 안전 확보의 책임은 여전히 담당한다. 3단계는 시스템이 상황 인식을 포함한 연속 작업을 자율적으로 수행할 수 있는 단계로, 개입이 필요한 상황을 스스로 판단하여 안전 정지 상태로 전환할 수 있으며, 필요 시 작업자가 대체 작업을 수행한다. 4단계에서는 운영 설계 영역(Operational Design Domain, ODD) 내에서 시스템이 연속 작업과 대체 작업을 모두 완전 자율적으로 수행할 수 있고, 위험 상황에서는 자동 정지 기능이 작동할 수 있다. 마지막으로 5단계는 인간의 개입 없이 자동화 시스템이 장비를 전적으로 제어하여, 수동 장비가 수행 가능한 모든 작업을 자율적으로 처리하는 완전 자율 수준을 의미한다.
한편, 광산 운영의 관점에서 자동화 성숙도는 장비 구성 및 운영 방식에 따라 수동 운영, 하이브리드 운영, 고도 자율 운영으로도 구분될 수 있다. 수동 운영은 모든 장비가 작업자의 직접 조작에 의해 운용되는 전통적 형태이며, 하이브리드 운영은 수동, 준자율, 완전 자율 장비가 혼재하여 함께 운용되는 과도기적 운영 방식이다. 반면 고도 자율 운영은 대부분 또는 모든 장비가 자율 시스템으로 구성되어 운영되는 단계로, 자율광산 실현을 위한 최종적 운영 모델로 간주된다. 이러한 분류 체계는 무인 적재 장비의 도입 수준과 운영 전략을 객관적으로 판단하고, 향후 자동화 고도화 로드맵을 수립하는 데 기초 자료로 활용될 수 있다.
3. 글로벌 제조사의 무인 적재 장비 기술 동향
본 장에서는 글로벌 주요 제조사의 무인 적재 장비에 대해 기술적·산업적 동향을 정리하였다. 각 제조사의 원격 조종 및 자율화 기술, 시스템 구성, 상용화·실증 현황을 중심으로 서술하였다.
3.1 캐터필라(Caterpillar, 미국)
Caterpillar는 광산 장비의 자동화·무인화를 지원하기 위해 종합 제어 플랫폼인 Cat® MineStar™를 구축하고, 이를 기반으로 로더 및 굴착기의 원격·자율 운용을 구현하고 있다. Cat® MineStar™는 작업자가 별도의 제어 공간에서 장비 상태와 작업 환경을 실시간으로 감시하면서 운용할 수 있도록 설계된 통합 시스템으로, 직관적인 사용자 인터페이스를 통해 원격 제어를 수행하고 현장 데이터를 공유·분석하여 채굴 공정을 통합적으로 관리한다. Fig. 2는 원격 제어 환경에서 무인 장비를 조작하는 작업자와 작업 현장에서 운전석이 비어 있는 무인 로더의 조종석 내부를 제시한 것이다.

Fig. 2.
Overview of Caterpillar’s teleoperation and unmanned loader. (a) Operator remotely controlling an unmanned loader. (b) Interior view of the unmanned loader’s empty operator cabin at the worksite (Caterpillar, 2020).
Cat® MineStar™ Command for Excavating은 Caterpillar의 굴착기 원격 제어 솔루션으로, 위험 작업 구역에서 운전자를 장비로부터 분리함으로써 안전성과 생산성을 향상시키고 작업 피로를 저감하는 것을 목표로 한다. 해당 시스템은 운용 거리와 제어 환경에 따라 Command console과 Command station으로 구분된다. Command console은 약 400 m 이하의 단거리 원격 조작에 적합한 장치이며, Command station은 원격 사무실에서 최대 5대의 장비를 동시에 비시야(non-line-of-sight) 환경으로 제어할 수 있도록 구성된다. 시스템 적용 대상은 20~40톤급 굴착기 모델이며, 시야 내(line-of-sight)와 비시야 원격 조종을 모두 지원한다. 카메라, 센서, 무선 통신 모듈을 통한 실시간 제어가 가능하고, Grade Assist, Swing Assist, E-Fence 등 작업 보조 기능의 원격 설정 또한 지원한다. 더불어 지상 스위치를 이용한 모드 전환을 통해 수동 운전과 원격 운전을 작업 조건에 따라 유연하게 전환할 수 있다. Fig. 3은 Command for Excavating의 시스템 구성과 무인 굴착기 적용 사례를 보여준다.
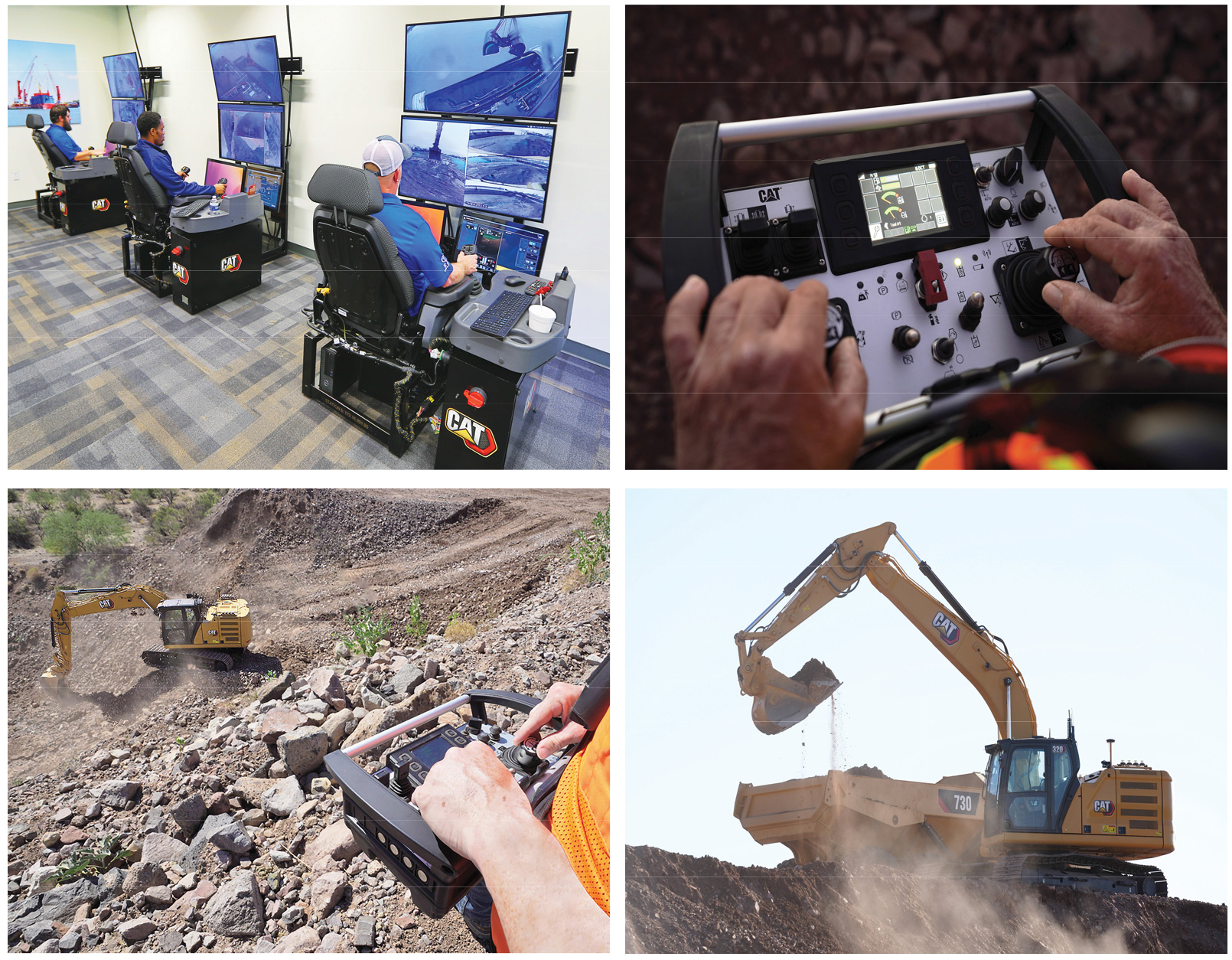
Fig. 3.
Caterpillar’s Cat® MineStar™ Command for excavating and an unmanned excavator (Caterpillar, 2025)
한편 Cat® MineStar™ Command for Excavating은 작업자가 원격에서 장비를 직접 조작하는 teleoperation 기반 운용 체계이며, Grade Assist, Swing Assist, E-Fence와 같은 제한적 작업 보조 기능을 포함한다. 따라서 장비가 작업 전 과정을 독립적으로 수행하는 자율 단계에는 이르지 못하고, 정의된 작업 영역에서 일부 기능이 자동화되는 수준으로 판단되므로 자동화 성숙도는 Level 2(partial automation)로 평가할 수 있다.
3.2 알씨티(RCT, 호주)
호주의 RCT (Remote Control Technologies)는 Control Master® 플랫폼을 통해 로더를 포함한 다양한 광산 장비에 원격 조종과 자동화 기능을 적용해 왔으며, 특정 OEM에 한정되지 않고 Caterpillar, Sandvik, Komatsu 등 여러 제조사의 장비로 확장 가능한 범용 제어 솔루션을 제공한다. Control Master®는 원격 조종 기능을 중심으로 장비 운용 데이터를 통합·분석하는 구조로 되어 있으며, 장비의 위치 인식, 이동 경로 계획, 주행 상태 분석 등 자동화 보조 기능을 함께 수행함으로써 안전성과 생산성을 동시에 향상시키는 것을 목표로 한다. 특히 원격 제어 시스템은 작업자를 위험 구역으로부터 분리한 안전한 장소에서 장비를 운용할 수 있도록 하고, 단일 작업자가 자동화 보조 기능을 기반으로 복수의 장비를 동시에 제어할 수 있는 다중 장비 관리 개념을 지원한다. Fig. 4는 호주 광산 현장에서 운용 중인 Control Master® 기반 무인 로더와 원격 제어 작업 환경을 보여준다.

RCT는 파푸아뉴기니 Porgera 금 광산의 Caterpillar R2900 로더에 현장 원격 제어/조종 기술을 적용해 작업 안전과 효율을 개선하였으며, 운영 효율 약 16% 향상을 보고하였다. 2024년에는 호주 Hillgrove Resources의 Kanmantoo 동 광산에서 Caterpillar 로더 CAT2900 2대에 Control Master®를 적용해 원격 안전 제어를 구현하였다. 또한 호주 Mandalay Resources의 Costerfield 금광산에서는 원격 조종 및 자동화를 통해 광석 회수율을 약 95%까지 높였다. Aeris Resources가 운영하는 Tritton 광산에는 원격 조종 및 Surface control system을 도입해 최대 채굴량을 달성하였다. 중국 White Mountain 금광산에서는 Control Master® 적용으로 생산성이 25~30% 향상되어 약 6개월 내 투자비 회수가 가능할 것으로 전망되었다. Fig. 5는 파푸아뉴기니와 중국 현장의 적용 사례를 나타낸다. RCT의 Control Master®는 원격 조종 기반 운영 방식에 위치·경로 인식 및 보조 자동화 기능을 결합한 시스템으로 작업 보조 중심의 자동화 수준을 제공한다. 시스템이 작업 사이클을 완전히 자율 수행하지 않으므로, 자동화 성숙도는 Level 2(partial automation)라고 할 수 있다.

3.3 립헬(Liebherr, 독일)
독일의 Liebherr는 로더 원격 운용을 지원하기 위해 Liebherr Remote Control (LiReCon) 시스템을 개발·적용하고 있다. LiReCon은 광산 현장에서 로더를 작업자 탑승 없이 원격으로 제어하도록 설계된 시스템으로, 장비에 카메라와 무선 통신 송수신기를 탑재하여 작업자가 원격 스테이션에서 장비 상태와 작업 환경을 실시간으로 확인하며 조작할 수 있도록 한다. 또한 능동형 사람 인식 시스템(Active Person Recognition System, APRS)을 통해 작업자와 주변 장애물을 능동적으로 인식하고, 위험 상황을 사전에 감지함으로써 작업 안전성을 강화한다. Fig. 6은 LiReCon 시스템의 원격 제어 스테이션과 현장에서의 무인 장비 운용 장면을 제시한 것이다.

Fig. 6.
Liebherr’s remote control system LiReCon. (a) Liebherr’s control station. (b) Worker operating unmanned equipment at a work station (Liebherr, 2024).
LiReCon은 원격 스테이션에서 작업자가 장비를 직접 조작하는 원격 조종 기반 운용 체계를 중심으로 하며, APRS와 같은 안전 보조 기능을 통해 작업 위험을 저감하는 구조를 갖는다. 그러나 장비가 작업 사이클을 스스로 수행하는 자동화 기능은 포함되지 않고, 적재 작업의 전 과정이 작업자 조작에 의해 수행된다는 점에서 자율 수준은 제한적이다. 따라서 LiReCon 시스템은 작업자 주도 원격 운용을 기반으로 제한적 보조 기능이 결합된 형태로 판단되며, 본 연구의 자동화 성숙도 기준에 따르면 Level 1(operator assistance) 수준에 해당한다.
3.4 볼보(Volvo, 스웨덴)
스웨덴 Volvo는 PIMM 프로젝트를 통해 무인 휠로더 L180H를 적용한 바 있으며, 본 장비는 약 25톤의 적재 용량을 갖는 노천광산용 무인 적재 장비이다. L180H는 장소의 제약 없이 원격 조종이 가능하도록 설계되었고, 작업자 숙련과 운영 안정성을 높이기 위해 트레이닝 시뮬레이터와 실제 제어 스테이션이 동일한 구성과 인터페이스를 갖추도록 개발되었다. 또한 동작 센서를 활용하여 장비의 움직임에 대한 실시간 피드백을 제공함으로써 원격 조종 환경에서도 조작 정밀도와 응답성을 향상시키는 특징을 가진다. Fig. 7은 Volvo의 제어 스테이션과 L180H 무인 휠로더의 운용 모습을 나타낸다.

Fig. 7.
Volvo’s control station and L180H remote-operated wheel loader used in the PIMM project (Volvo, 2025)
Volvo L180H 무인 휠로더는 작업자가 원격에서 장비를 직접 운전하는 teleoperation 기반의 운용 체계를 중심으로 하며, 동작 센서 기반 실시간 피드백 제공과 같은 작업 보조 기능을 포함한다. 그러나 적재 작업의 주요 사이클을 장비가 자동 또는 자율적으로 수행하는 기능은 적용되지 않은 것으로 판단된다. 따라서 본 연구의 자동화 성숙도 기준에 따르면 L180H 시스템은 제한적 보조 기능을 제공하는 작업자 주도 원격 운용 단계에 해당하므로, Level 1(operator assistance) 수준으로 평가할 수 있다.
3.5 에피록(Epiroc, 스웨덴)
스웨덴 Epiroc의 BenchRemote 시스템은 광산과 같은 고위험 작업 환경에서 작업자 안전을 확보하고 작업 효율을 향상시키기 위해 개발된 원격 제어(teleoperation) 기반 운용 시스템이다. BenchRemote는 자체 통신 네트워크를 통해 장비와 원격 제어 스테이션을 안정적으로 연결하며, 작업자가 현장 접근 없이 실시간으로 장비를 조작할 수 있도록 한다. 제어 스테이션은 이동식 구조로 설계되어 작업 현장 조건에 따라 유연하게 설치·운용할 수 있으며, 원격 운용 과정에서 수집되는 장비·작업 데이터는 광산 운영 시스템의 효율을 최적화하는 데 활용된다. Fig. 8은 BenchRemote 제어 스테이션에서 장비를 원격 조종하는 작업자와 운용 인터페이스 화면을 보여준다.

Fig. 8.
Epiroc’s BenchRemote teleoperation system. (a) Operator remotely controlling unmanned equipment from a workstation. (b) BenchRemote user interface for remote operation (Epiroc, 2022).
BenchRemote 시스템은 작업자가 원격 스테이션에서 장비를 직접 조작하는 운영 방식에 기반하며, 자체 통신 네트워크와 데이터 기반 운영 지원 기능을 제공한다. 그러나 장비가 적재 작업을 자동 또는 자율적으로 수행하는 기능은 포함하지 않으므로, 시스템은 작업 보조 중심의 원격 운용 수준에 해당한다. 따라서 본 연구의 자동화 성숙도 기준에 따르면 BenchRemote의 자동화 수준은 Level 1(operator assistance)으로 평가할 수 있다.
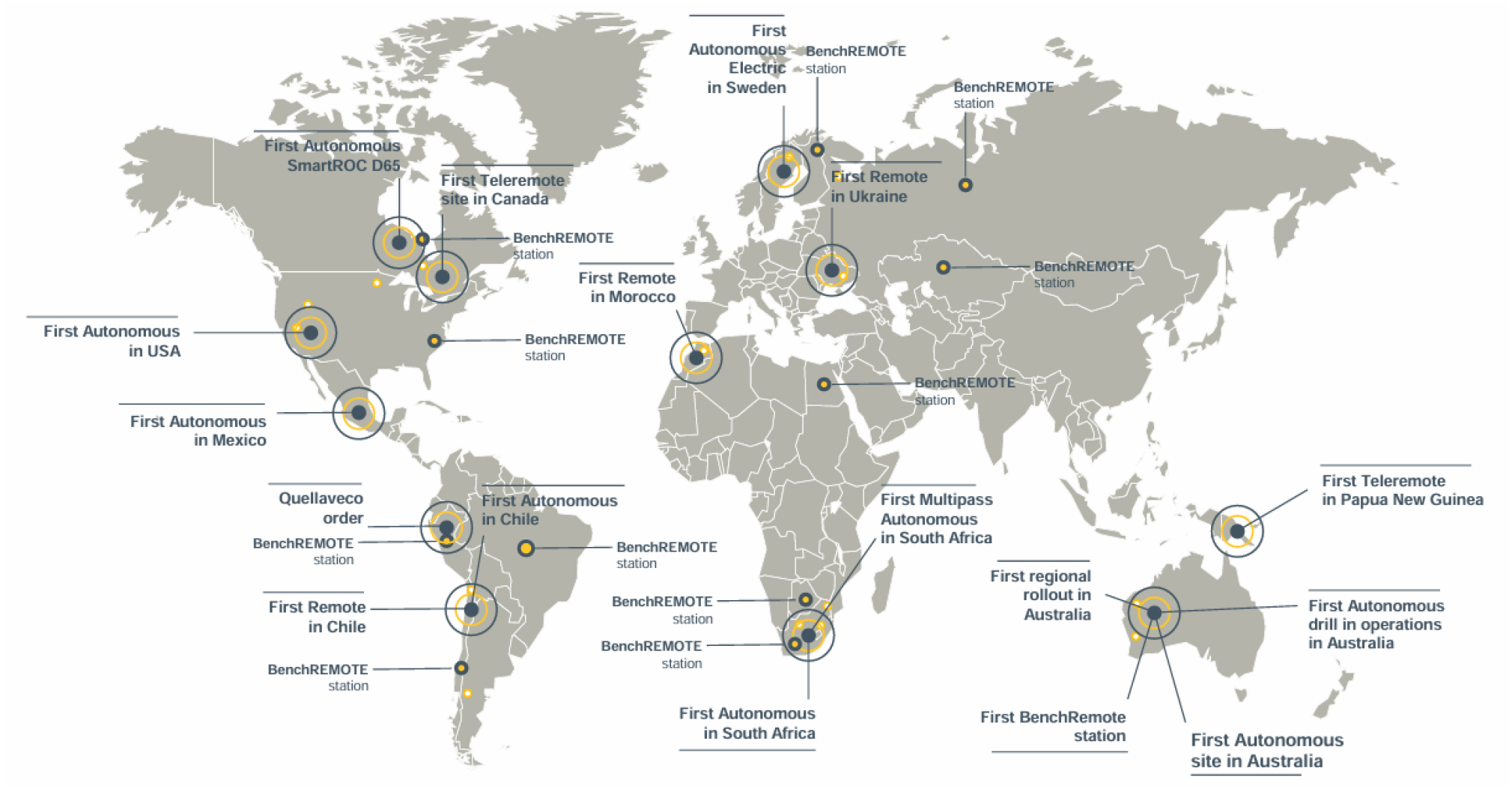
Epiroc의 BenchRemote 시스템은 호주에서 최초로 적용된 이후 현재 전 세계 16개국 이상으로 확산되어 운영되고 있으며, 최근에는 원격 조종 기반 운용을 넘어 자율 제어 시스템(autonomous control system)으로의 확장이 활발히 이루어지고 있다. Fig. 9는 BenchRemote 시스템이 적용되어 운용 중인 국가 분포를 나타낸 것이다.
한편, 스웨덴 Kiruna 철광산을 운영하는 LKAB (Luossavaara-Kiirunavaara AB)는 2022년에 지하 광산에 무인 휠로더를 도입하였다. LKAB는 Epiroc의 Autonomous Scooptram ST18 3대를 도입하고, 지상에 구축된 원격 제어실에서 갱내 장비를 실시간으로 제어하는 방식으로 운용하였다. 본 시스템은 기존에 작업자가 장비에 근접해야 했던 작업 반경 내 안전 문제와 공정 중단 위험을 해소하기 위한 목적으로 적용되었으며, 도입 이후 생산성 향상과 안전사고 저감 효과가 확인된 것으로 보고되었다.
3.6 코마츠(Komatsu, 일본)
일본 Komatsu는 광산 장비의 자동화 및 무인화 구현을 위해 Fig. 10과 같은 단계별 기술 개발 로드맵을 제시하였다. 로드맵은 총 네 단계로 구성되며, 반자동화(semi-automation), 원격 제어(remote control/teleoperation), 복합 단계(semi-automation + remote control/teleoperation), 자율 운행(autonomous operation)으로 구분된다. 반자동화 단계는 장비의 특정 작업을 자동화하여 작업 정밀도를 향상시키고 작업자의 피로를 경감하는 것을 목표로 하며, PC200i-11 굴착기와 WA470-8 휠로더가 대표 사례로 제시된다. 두 장비는 모두 자동 버킷 제어 기능을 포함하여 반복 작업의 안정성과 효율을 높이는 데 중점을 둔다. 원격 제어 단계는 조이스틱 또는 콘솔 기반으로 장비를 제어하는 방식으로, 운전자가 현장 외부의 제어실에서 실시간으로 작업을 수행하는 구조이며, PC200-11 굴착기가 해당 단계에 포함된다. 복합 단계는 반자동화 기능과 원격 제어 기술이 결합된 형태로, 초대형 유압 굴착기 PC7000-11이 대표 장비로 제시되며, 이 단계에서는 협동(collaboration) 개념이 도입되어 다른 자율 장비와의 연동 운용이 가능한 것이 특징이다. 다만 로더와 굴착기는 로드맵의 최종 단계인 완전 자율 운행 영역에는 포함되지 않았다.
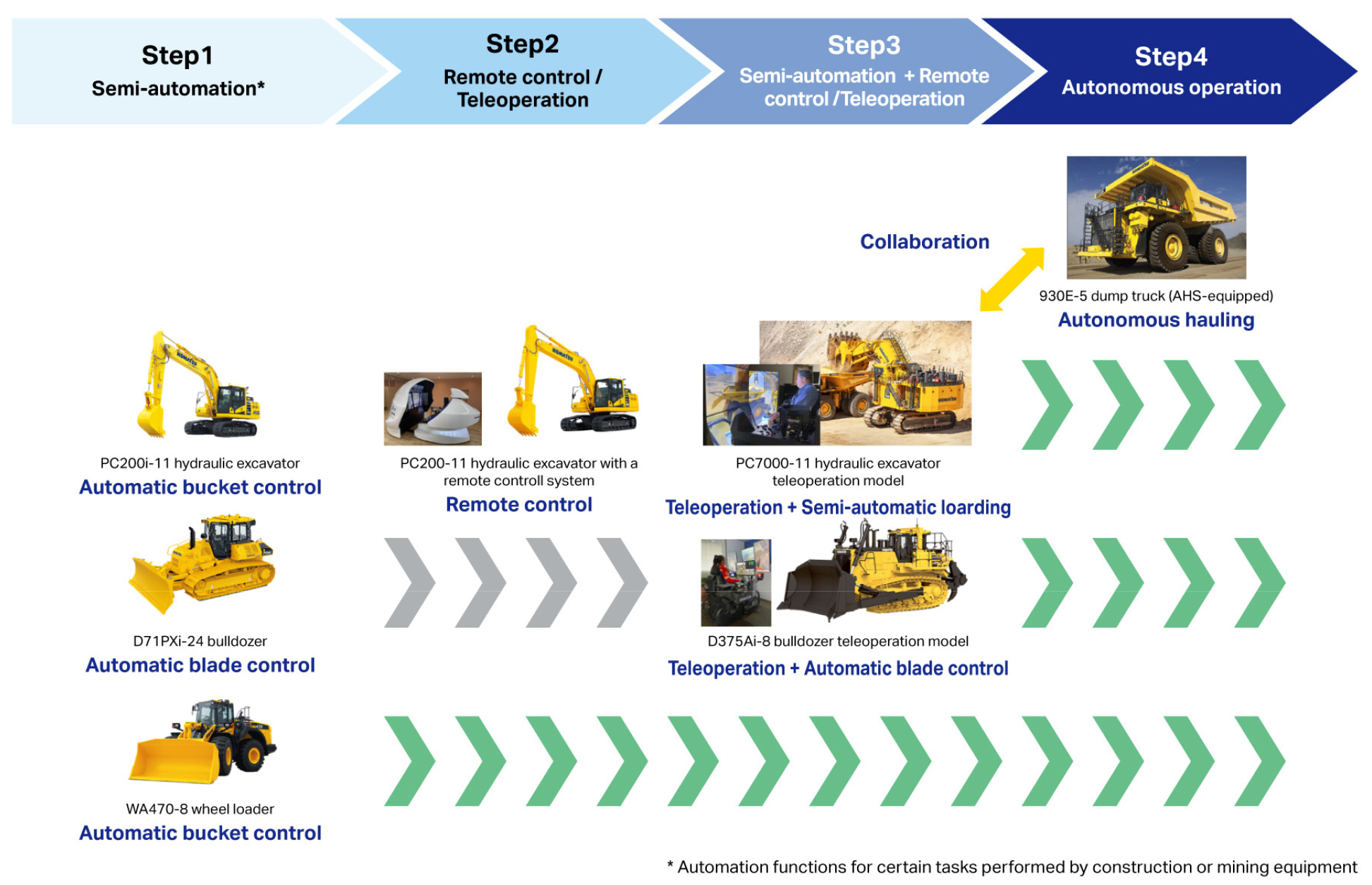
Fig. 10.
Komatsu’s roadmap for the automation development of construction and mining equipment (Komatsu, 2025)
Komatsu는 초대형 유압 굴착기 PC7000-11을 대상으로 원격 조작 시스템(teleoperation system)을 개발하고 이를 무인 광산화를 위한 핵심 기술로 제시하였다. 해당 시스템은 카메라, 센서, 무선 송신기, AR 기반 인터페이스로 구성되며, 지상 원격 콘솔에서 굴착·적재 작업을 수행할 수 있도록 설계되었다. Full-HD 해상도의 전방 카메라와 하드웨어 인코딩 방식을 적용하여 영상 지연(latency)을 약 50% 감소시켰고, 버킷, 하부, 주변 카메라 영상을 통합한 AR-based visual assist를 제공함으로써 작업자의 공간 인식 능력을 향상시켰다. 또한 스윙(swing), 덤핑(dumping), 붐다운(boom down) 구간을 자동화한 반자동 굴착·적재(semi-automatic loading) 기능과 실린더 말단 충격 완화(stroke-end cushioning) 기능을 탑재하여 작업 안정성과 장비 수명 개선을 동시에 도모하였다. Immersive Technologies의 시뮬레이터 기반 콘솔을 적용하여 실제 장비와 동일한 조작 환경을 제공하며, OPA (Operator Performance Analytics) 플랫폼을 통해 작업자의 조작 패턴을 분석하고 교육 피드백을 제공하도록 구성된 점도 특징이다.
Komatsu는 2021년 미국 라스베이거스에서 개최된 MINExpo에서 PC7000-11 원격 조작 시스템을 시연하였으며, 자율 덤프트럭인 Innovative Autonomous Haulage Vehicle에 토사를 원격으로 적재하는 데 성공하였다. 시뮬레이터 및 현장 시험 결과 기존 시스템 대비 약 37%의 생산성 향상을 달성하였고, 탑승 조작과 유사한 수준의 작업 효율을 확보한 것으로 보고되었다. 본 시스템은 향후 상용 광산에서의 시범 운전과 실증 운용을 거쳐 완전 무인화 단계로 발전할 것으로 예상된다(Morinaga, 2022).Fig. 11 은 Komatsu의 원격 제어 유압식 굴착기와 제어 스테이션을 나타낸다. Fig. 11(a)는 원격 조작 키트가 장착된 무인 굴착기 PC7000-11, Fig. 11(b)는 제어 스테이션 전경, Fig. 11(c)과 Fig. 11(d)는 실제 장비에 설치된 조작 콘솔의 구성을 보여준다.
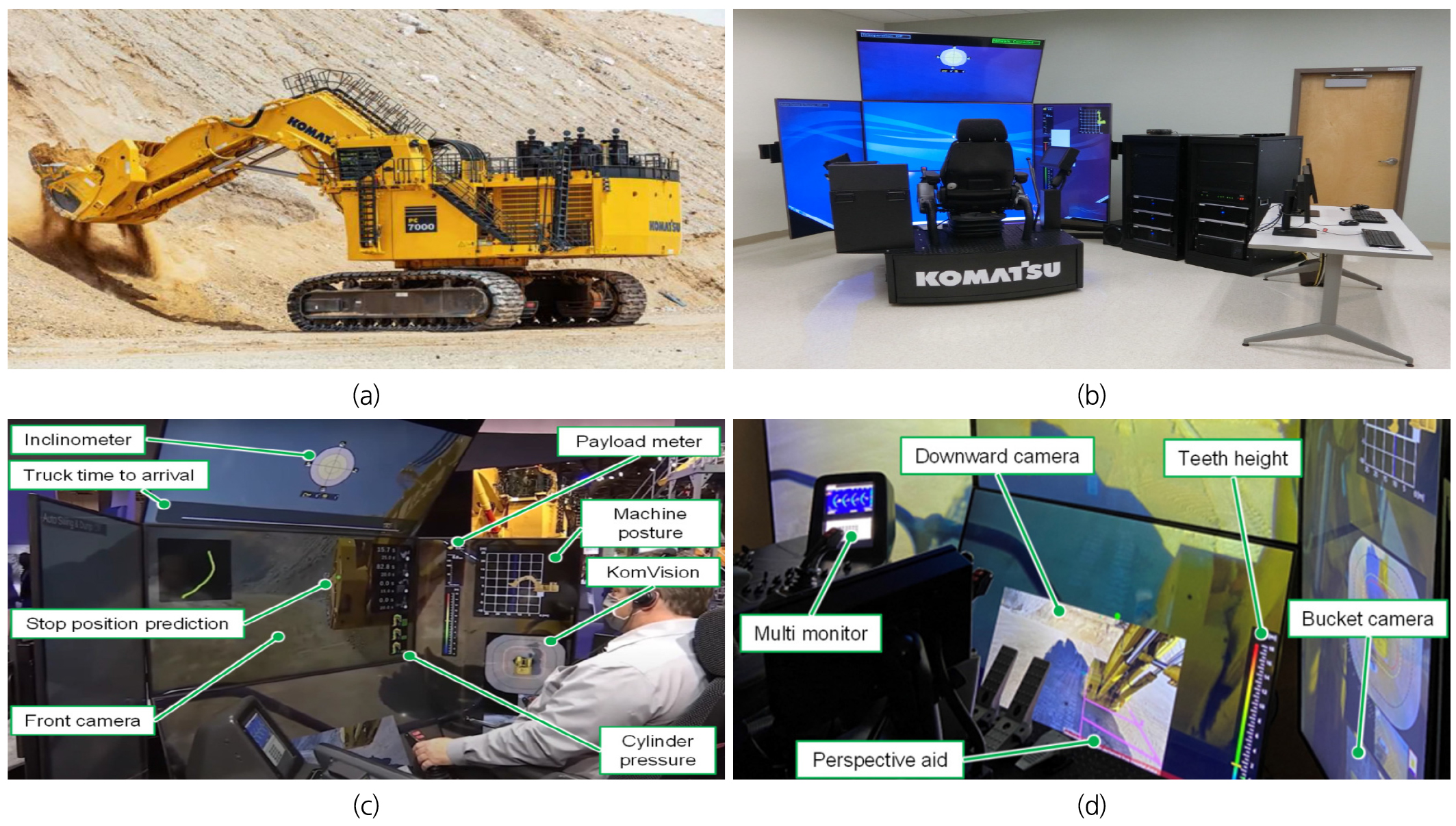
Fig. 11.
Komatsu’s unmanned excavator and teleoperation station. (a) PC7000-11 equipped with a teleoperation kit. (b) Overall view of the teleoperation station. (c) Teleoperation console installed on the actual machine. (d) Close-up view of the teleoperation console on the machine (Morinaga, 2022).
Komatsu의 자동화 로드맵은 반자동화, 원격 제어, 복합 단계, 자율 운행으로 구성되지만, 이를 GMG의 광산 자동화 성숙도 모델 기준으로 재해석하면 단계별 자동화 수준을 보다 명확히 판단할 수 있다. 반자동화 장비인 PC200i-11과 WA470-8, 그리고 복합 단계 장비인 PC7000-11은 특정 기능의 자동화를 포함하고 있으므로 Level 2(partial automation)에 해당하며, 원격 조종 기반 장비인 PC200-11은 작업자 제어를 중심으로 제한적 보조 기능만 제공하는 수준이므로 Level 1(operator assistance)으로 평가할 수 있다.
3.7 히타치(Hitachi, 일본)
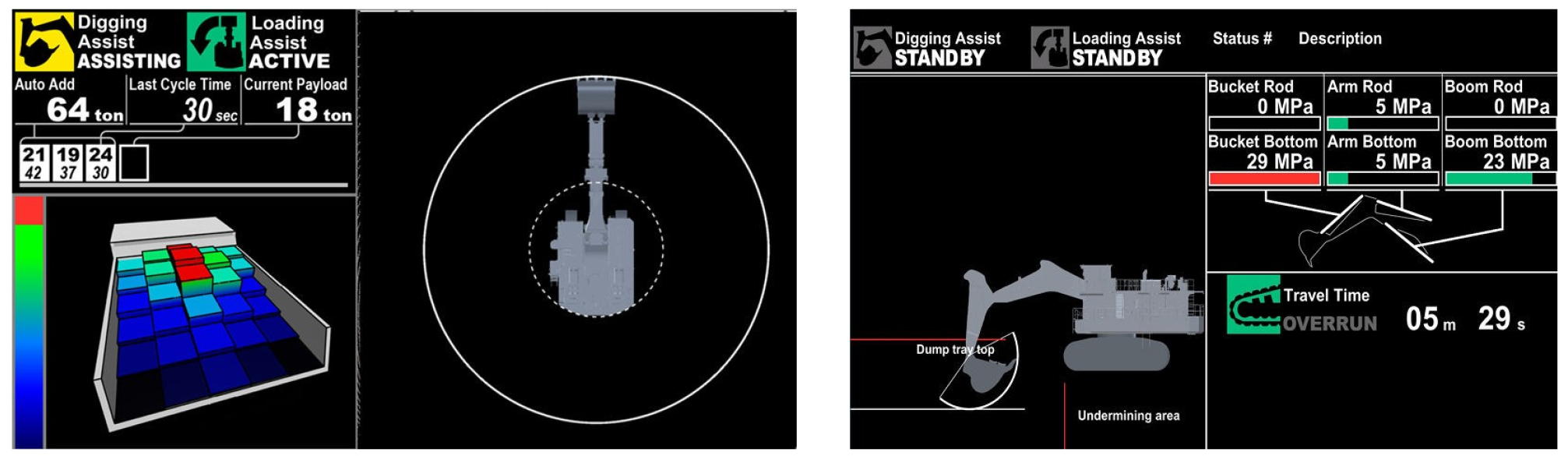
Hitachi는 광산 현장에서 초대형 유압식 굴착기의 자율 운전(autonomous operation)을 구현하기 위해 원격 제어와 운전 지원 기술을 중심으로 자동화 체계를 고도화하고 있다. 이를 위해 고도화된 원격 제어 시스템(advanced remote control system)과 운전 지원 시스템(operation support system)을 구축하여, 작업자가 원격 환경에서도 장비를 안정적으로 운용하고 장비 간 충돌 위험을 최소화할 수 있도록 하였다. 또한 굴착 및 상차 작업의 일부를 자동화함으로써 한 명의 작업자가 여러 대의 굴착기를 동시에 제어할 수 있는 기반을 마련하고 있으며, 향후 이러한 기술을 통합해 완전 자율형 초대형 굴착기로 발전시키는 것을 목표로 한다. Digging Assist 기능은 굴착 과정에서 과부하가 발생할 경우 버킷 동작을 자동으로 제어하여 장비 손상과 작업 중단을 예방하고, Loading Assist 기능은 상차 과정에서 전면 부속 장치를 자동으로 상승시켜 덤프트럭과의 충돌을 방지함으로써 작업 안정성과 효율을 높인다. Fig. 12는 ZCORE 기반 초대형 유압 굴착기의 원격 제어 시연 장면을 제시한다.

Fig. 12.
Remote control demonstration of a ZCORE-based ultra-large hydraulic excavator (Hitachi, 2025a)
Hitachi는 초대형 유압 굴착기 EX3600-7 모델에 운전 지원 시스템(operator assist system)을 적용하여 2024년 3월부터 호주 Rio Tinto의 Pilbara 철광석 광산에서 검증 시험을 수행하였다. 본 시스템은 Digging Assist와 Loading Assist 기능을 통해 굴착 중 과도한 실린더 부하를 자동 제어하고, 상차 시 전면 부착물을 자동 상승시켜 장비 보호와 충돌 방지, 생산성 향상, 연료 절감을 동시에 달성하는 것을 지향한다. 이를 통해 작업자의 숙련도와 무관하게 안정적이고 효율적인 조작을 지원하며, 작업 부담 감소와 현장 안전성 강화에 기여한다. 검증 시험에서는 실제 광산 환경에서 시스템 제어 성능과 운전석 디스플레이의 사용성을 평가하였고, Hitachi는 Rio Tinto와의 협력을 통해 확보한 데이터를 기반으로 2025년부터 Operator Assist System의 단계적 상용화를 추진할 계획이다. Fig. 13은 EX3600-7 굴착기의 외관을, Fig. 14는 전용 보조 모니터의 예시를 각각 보여준다.

아울러 Hitachi는 2025년 10월 8일 Rio Tinto와 초대형 유압 굴착기 원격 조작 기술 개발을 위한 협약을 체결하고, 향후 5년간 협력을 강화하여 차세대 광산 운영을 지원하는 기술 개발을 지속할 계획임을 밝혔다(Hitachi, 2025b). Hitachi는 2030년까지 광산 현장 전반에서 부분적 자율성을 갖춘 다수의 초대형 유압 굴착기가 상호 연동되어 운용될 수 있는 플랫폼(interoperable platform)을 구축하는 것을 목표로 하고 있다. 다만 현재 단계에서 Hitachi의 초대형 굴착기 자동화는 원격 조종 기반 운용 위에 Digging Assist, Loading Assist와 같은 작업 보조 기능이 결합된 수준이며, 장비의 주요 작업 사이클은 여전히 작업자 주도의 원격 조작에 의해 수행된다. 따라서 본 연구의 자동화 성숙도 기준에 따르면 Hitachi의 시스템은 Level 2(partial automation) 수준으로 평가할 수 있다.
3.8 HD 현대건설기계(HD Hyundai Construction Equipment, 대한민국)
HD 현대건설기계는 ‘2025 서울 모빌리티쇼(Seoul Mobility Show 2025)’에서 40톤급 스마트 굴착기 HX400을 공개하며, 광산 및 건설 현장 적용을 고려한 무인·지능형 굴착 기술의 방향성을 제시하였다. HX400은 비전 센서(vision sensor)를 활용해 주변 장애물을 인식하고, 인공지능(AI) 기반 휴먼 디텍션(human detection) 객체 인식 기술을 적용함으로써 작업자 접근 여부를 실시간으로 판단하고 안전을 확보할 수 있도록 설계되었다. 또한 무인 굴착기에는 LiDAR와 카메라로 구성된 복합 비전 센서가 탑재되어 작업 구역의 지형 데이터를 수집하며, 이를 기반으로 지형 지도를 실시간으로 시각화한다. 장비는 수집된 데이터를 활용해 작업 환경을 스스로 분석하고, 작업 스케줄링과 경로 계획을 수행할 수 있는 기능을 갖추고 있다는 점에서 단순 원격 조종을 넘어선 지능형 자동화 지향 특성을 보여준다.
HD 현대건설기계는 이러한 기술을 단계적으로 상용화할 계획을 제시하였다. 2026년부터는 기존 장비에 부착 가능한 모듈형 시스템 형태로 시장 적용을 확대하고, 2030년에는 공장 출고 단계에서 완전 무인 자율 굴착기를 제공하는 것을 목표로 하고 있다(HD Hyundai, 2025a). Fig. 15는 서울 모빌리티쇼에서 공개된 HX400의 실물을 나타낸 것이다. HX400은 LiDAR–카메라 기반 복합 센싱을 통해 주변 환경을 인지하고, 자율 지형 분석과 작업 스케줄링, 경로 계획 기능을 수행한다는 점에서 시스템이 상황 인식과 연속 작업 수행을 포함하는 자동화 단계에 접근한 것으로 판단된다. 따라서 본 연구의 자동화 성숙도 기준에 따르면 HX400의 자동화 수준은 Level 3(full automation)에 해당한다고 평가할 수 있다.

4. 국내 광산의 무인 적재 장비 도입 사례
4.1 대성엠디아이(Daesung MDI) 단양사업소
대성엠디아이 단양사업소는 2022년 미분 공정의 원석 투입 작업을 대상으로 원격 조종 기반 무인 로더(unmanned loader)를 도입하여 자동 투입 시스템을 구축하였다. 기존 미분 공장은 24시간 연속 가동 체계로 운영되었으나, 유인 로더(manned loader)의 교대 근무가 중단되는 시간대에 원석 투입이 지연되면서 공정 연속성과 생산성이 저하되는 문제가 발생하였다. 이에 따라 사업소는 Wi-Fi(2.4 GHz) 통신망 기반 원격 제어 시스템을 도입하고, 미분 공장 운전실에서 무인 휠로더(wheel loader)를 실시간으로 조작할 수 있는 운용 체계를 마련하였다. 해당 시스템은 작업자가 원격에서 장비를 직접 제어하는 방식으로 운용되며, 장비가 작업을 자율적으로 수행하는 기능은 포함하지 않으므로 자동화 성숙도는 Level 1에 해당한다.
무인 로더 도입 이후 원석 투입 공정의 상시 운용이 가능해지면서 공정 자동화 수준이 향상되었고, 일일 가동시간이 약 1시간 증가하는 효과가 나타났다. 그 결과 미분 공장 전체 생산성은 약 7% 향상된 것으로 보고되었다. Fig. 16은 대성엠디아이 단양사업소의 무인 로더 제어실과 장비 운용 환경을 제시한 것으로, Fig. 16(a)는 제어실 내부, Fig. 16(b)는 무인 로더 장비, Fig. 16(c)는 무선 통신 AP 설치 장면, Fig. 16(d)는 실시간 작업 영상 모니터링 화면을 각각 나타낸다.

4.2 삼양리소스(Samyang Resource) 관인광산
삼양리소스 관인광산은 지하 광산 발파 이후 발생하는 대괴(large boulder)를 소할 발파 없이 안전하게 처리하기 위해 Wi-Fi 기반 원격 제어 시스템을 적용한 무인 LHD (load haul dump)를 운영하고 있다. 작업자는 갱외 제어실에서 무선 통신망(Wi-Fi)을 활용해 무인 LHD를 원격으로 조종하며, 이를 통해 위험 구역에 대한 작업자 접근을 최소화하고 작업 안전성을 확보하였다. 해당 운용 방식은 작업자가 원격에서 장비를 직접 제어하는 원격 조종 기반 체계로서, 장비가 작업을 자동 또는 자율적으로 수행하는 기능은 포함하지 않으므로 자동화 성숙도는 Level 1로 평가할 수 있다.
무인 LHD 도입 이후에는 발파 후 대괴 처리 공정이 중단 없이 수행되면서 연속 생산이 가능해졌고, 그 결과 생산량이 약 20% 증가한 것으로 보고되었다. 아울러 소할 발파에 투입되던 화학약품 사용량이 감소하여 연간 약 7,700만 원의 비용 절감 효과도 달성하였다. Fig. 17은 관인광산의 작업 환경과 무인 LHD 운용 모습을 제시한 것으로, Fig. 17(a)는 근거리 제어 개념도, Fig. 17(b)는 무인 LHD 장비, Fig. 17(c)는 갱외 원격 조종 장면, Fig. 17(d)는 갱내 작업 장면을 각각 나타낸다.

4.3 한일현대시멘트(Hanil Hyundai Cement) 영월광산
한일현대시멘트 영월광산은 파쇄기 호퍼에 투입되는 대괴를 보다 안전하고 신속하게 처리하기 위해 원격 조종 기반의 고정식 굴착기를 도입하였다. 기존에는 갱내 파쇄시설 내에서 유인 고정식 굴착기가 운용되었으나, 작업자가 파쇄기 호퍼 인근의 위험 구역에 직접 접근해야 하는 한계가 있었다. 이에 따라 2022년 갱내 파쇄시설(공장)에 원격 조종 고정식 굴착기를 설치하고, 외부 운전실에서 장비를 원격으로 제어할 수 있는 운영 체계를 구축하였다. 고정식 붐에 Wi-Fi 기반 통신 기술을 적용하여 실시간 원격 조종이 가능하도록 하였으며, 운용 방식은 작업자가 원격에서 장비를 직접 조작하는 방식이므로 자동화 성숙도는 Level 1에 해당한다.
원격 조종 고정식 굴착기 도입 이후 파쇄기 호퍼 내 대괴 처리의 대응성이 향상되면서 파쇄설비의 가동률이 증가하였고, 그 결과 연간 약 7만3천 톤의 생산량 증가 효과가 발생하였다. Fig. 18은 작업자가 고정식 굴착기를 원격으로 조종하는 장면과 영월광산에 도입된 원격 조종 고정식 굴착기의 설치·운용 모습을 보여준다.

5. 토 의
5.1 기술적 특징
Table 1은 주요 제조사별 대표 시스템과 핵심 기술을 비교·정리한 것으로, 무인 적재 장비의 기술적 발전 방향을 파악하는 데 유용한 기준을 제공한다. 무인 로더(unmanned loader) 분야에서 Caterpillar는 Cat® MineStar™를 기반으로 원격 모니터링(remote monitoring)과 정밀 제어 기술을 통합하여 장비의 실시간 추적 및 데이터 공유 기능을 구현하고 있다. RCT는 최대 약 200 m 범위에서 다중 장비를 원격으로 동시에 조작할 수 있는 원격 조종 기술을 확보하였으며, Caterpillar, Sandvik, Komatsu 등 다양한 원장비(Original Equipment Manufacturer, OEM)와의 호환성을 바탕으로 적용 범위를 확장해 왔다. Liebherr는 카메라 기반 원격 제어 체계에 인체 인식(active person recognition) 기능을 결합하여 작업 구역 내 안전성을 강화하였고, Volvo는 완전 원격 조작 방식을 도입하면서 시뮬레이터와 제어 스테이션 간 동일한 조작 환경을 제공함으로써 원격 운용의 숙련성과 재현성을 높였다. Epiroc 또한 Wi-Fi 기반 영상 제어와 센서 보조 정밀 제어(sensor-assisted precision control)를 결합하여 안정적이고 효율적인 원격 작업이 가능하도록 시스템을 구성하였다.
Table 1.
Representative systems, models and key features by manufacturer
무인 굴착기(unmanned excavator) 분야에서는 제조사별로 원격 운용 기반 기술을 고도화하는 방향성이 두드러진다. Caterpillar는 시야 내(line-of-sight) 및 비시야(non-line-of-sight) 환경 모두에서 원격 제어가 가능한 시스템을 제공하며, 현장 키트 설치만으로 기존 장비에도 적용할 수 있는 retrofit 기반 확장성을 확보하였다. Komatsu는 저지연 원격 조작(low-latency teleoperation) 기술에 반자동 굴착·적재(semi-automatic digging & loading)를 결합하고, 증강현실(AR) 기반 시각 보조 기능을 통해 작업자의 공간 인지와 정밀도를 향상시켰다. Hitachi는 과부하 및 충돌 방지 기능을 포함한 고도화된 원격 제어 시스템을 구축하는 한편, 한 명의 작업자가 여러 대의 장비를 동시에 운용할 수 있는 다중 제어 기술을 개발 중이다. HD Hyundai는 인공지능(AI) 및 머신러닝(machine learning) 기반 자율 작업 기술을 적용하고, LiDAR–카메라 복합 센싱을 통한 실시간 지형 분석과 객체 인식 기능으로 작업 안전성을 강화하는 방향을 제시하였다.
특히 Komatsu와 HD Hyundai의 기술적 접근은 무인 적재 장비의 지능화 추세를 대표한다. Komatsu는 센서 기반 자동화 기능을 넘어 AR 기술을 작업 인터페이스에 적용함으로써 작업자의 인지 능력과 현장 모니터링 정밀도를 증대시켰으며, HD Hyundai는 AI 기반 휴먼 디텍션(human detection) 객체 인식 기술을 통해 작업자 접근 상황을 능동적으로 판단하고 안전 확보 기능을 강화하였다. 이러한 지능형 기술(intelligent technologies)의 확산은 장비가 환경을 해석하고 작업을 계획·수행하는 능력을 고도화함으로써 향후 완전 자율 장비(fully autonomous equipment) 구현을 앞당길 핵심 요인으로 평가된다.
GMG에서 제시한 광산 자동화 성숙도 모델을 기준으로 무인 적재 장비의 자동화 성숙도를 분석한 결과, 현재 상용 또는 현장 적용 단계의 대부분 장비는 Level 1 또는 Level 2 수준에 머무르는 것으로 나타났다. 이는 원격 운용과 국소적 보조 기능이 중심이며, 작업 사이클 전체를 장비가 독립적으로 수행하는 완전 자율화 단계에는 도달하지 못했음을 의미한다. Level 3 기술을 보유한 기업은 HD Hyundai가 유일하지만, 해당 기술 역시 전시를 통해 공개된 수준으로 현장 상용화 이전 단계에 해당하므로, 산업 전반의 자동화 성숙도는 향후 실증과 운영 경험 축적을 통해 점진적으로 고도화될 필요가 있다.
5.2 도입 효과
Table 2는 국내외 광산에서 무인 적재 장비를 도입한 이후 확인된 운영 성과를 정리한 것으로, 무인화 기술이 생산성과 안전성 측면에서 실질적인 효과를 제공하고 있음을 보여준다. 국내 사례를 보면, Daesung MDI는 원격 제어 기반 무인 로더를 미분 공정에 적용함으로써 교대 근무 공백에 따른 투입 지연 문제를 해소하였고, 그 결과 공장 가동시간이 하루 평균 약 1시간 증가하면서 전체 생산성이 약 7% 향상되었다. Samyang Resource는 무인 LHD를 도입하여 위험 구역 내 작업자 접근을 최소화하는 동시에 연속적인 생산 체계를 확보하였으며, 이에 따라 생산량이 약 20% 증가하고 소할 발파용 화학약품 비용이 연간 약 7,700만 원 절감되는 효과를 달성하였다.
Table 2.
Key achievements from deploying unmanned loading equipment by manufacturer and mine operator
해외 적용 사례에서도 무인 적재 장비의 효과는 뚜렷하게 확인된다. RCT의 Control Master® 기반 시스템은 여러 광산에서 생산성 및 회수율 향상에 기여한 것으로 보고되었는데, 파푸아뉴기니 Porgan 금광산에서는 운영 효율이 약 16% 개선되었고, 호주 Costerfield 금광산에서는 원격 조종 및 자동화 적용을 통해 광석 회수율이 약 95%까지 향상되었다. 또한 중국 White Mountain 금광산 사례에서는 Control Master® 적용 후 생산성이 약 25~30% 증가하여 경제적 타당성 측면에서도 긍정적 효과가 제시되었다. 이러한 성과는 원격 운용 기반 무인 기술이 단순한 안전 확보를 넘어, 생산 공정의 연속성과 장비 활용률을 향상시키는 실질적 수단으로 작동하고 있음을 시사한다.
5.3 향후 발전 방향
Table 3은 주요 제조사별 무인 적재 장비의 중장기 기술 전략을 요약한 것으로, 각 기업이 지향하는 자동화 고도화 경로와 상용화 시점을 비교하는 데 의미가 있다. HD Hyundai는 2026년부터 기존 굴착 장비에 부착 가능한 모듈형 시스템 형태로 상용화를 추진하고, 2030년까지는 공장 출고 단계에서 완전 무인 장비를 공급하는 것을 목표로 하고 있다. Hitachi는 다중 장비 통합 제어 시스템(multi-excavator control system)을 개발하는 동시에, 2025년부터 Operator Assist System을 단계적으로 상용화할 계획이다. 더 나아가 2030년까지 광산 현장에서 부분적 자율성을 갖춘 초대형 굴착기들이 상호 연동되어 운용될 수 있는 상호 운용 가능한 플랫폼(interoperable platform)을 구축하는 것을 목표로 하고 있다. Komatsu는 반자동화 단계에서 작업 정밀도 향상과 작업자 피로도 감소를 우선 과제로 설정하고 있으며, 이를 기반으로 장기적으로 완전 무인화(full automation) 단계로의 전환을 준비하는 전략을 제시하고 있다. 이러한 개발 로드맵이 계획대로 실현될 경우, 현재 원격 조종 및 보조 자동화 중심의 Level 1~Level 2 수준에 머무른 자동화 성숙도는 향후 Level 3~Level 4 단계로 확장될 가능성이 크다.
Table 3.
Future strategies for unmanned loading equipment by manufacturer
한편, 무인 적재 장비의 기술적 고도화는 규제 및 제도 환경과 긴밀하게 연계되어 있으며, 관련 기준이 동반 정비되지 않을 경우 기술 확산 과정에서 제약이 발생할 수 있다. 특히 기능 안전(functional safety), 수동·자율 장비의 혼합 운영(mixed operation), 통신 안정성 및 사이버 보안(cybersecurity)과 같은 새로운 위험 요소가 증가하고 있으나, 기존 법·제도 체계가 이를 충분히 포괄하지 못하는 한계가 지적되고 있다(GMG, 2024, Department of Mines and Petroleum, 2015). 따라서 무인 장비의 현장 적용과 확산을 위해서는 규제기관과의 조기 협의를 바탕으로 자율 시스템 전용 안전 기준을 마련하고, 데이터 기반 검증 체계를 구축하는 등 제도적 기반을 선제적으로 확충할 필요가 있다.
6. 결 론
본 연구에서는 광산 무인화를 위한 핵심 요소로서 무인 적재 시스템(autonomous loading system)과 무인 적재 장비(unmanned loading equipment)의 개념을 정립하고, 글로벌 주요 제조사의 기술 개발 동향 및 국내외 적용 사례를 기술적·산업적 관점에서 종합적으로 분석하였다. 이를 통해 제조사별 시스템 특성과 자동화 성숙도 수준을 비교하고, 무인 적재 기술이 광산 운영에 미치는 영향과 향후 발전 방향을 도출하고자 하였다.
분석 결과, 자율적재시스템은 LiDAR, 카메라, GPS 기반의 위치 인식과 객체 탐지·인지, 장애물 회피 및 자동 정지와 같은 주행·안전 기술을 중심으로 발전하고 있으며, 정밀 적재 작업을 지원하기 위한 원격 제어와 통신 기술의 고도화가 병행되고 있음을 확인하였다. 특히 무인 로더는 버킷을 이용한 상차 작업의 특성상 고정밀 조작과 복잡한 현장 대응이 요구되므로, 현 단계에서는 완전 자율주행보다는 원격 조종(teleoperation) 기반 운용이 주류를 이루고 있다. 또한 작업자의 위험 노출을 최소화하기 위해 갱외 또는 안전 구역에 설치된 제어 스테이션을 활용하는 운영 방식이 확산되는 추세이다.
주요 제조사들은 각기 다른 기술 전략을 통해 무인 적재 장비의 상용화를 추진하고 있다. RCT는 다양한 OEM 장비에 적용 가능한 Control Master® 기반 원격 운용 시스템을 통해 현장 적용성과 확장성을 확보하였고, Komatsu는 반자동 굴착·적재 기능과 증강현실(augmented reality, AR) 기반 시각 보조 기술을 결합하여 원격 조작의 정밀도와 작업 인지 능력을 향상시켰다. Epiroc은 원격 제어 기술을 상용화하여 다수 국가에서 운용 사례를 축적하고 있으며, HD 현대건설기계는 AI 기반 객체 인식과 지형 분석, 작업 계획 기능을 포함한 지능형 굴착 기술을 단계적으로 상용화하여 2030년 완전 무인 굴착기 출시를 목표로 하고 있다. 이러한 기술 적용은 생산 효율 향상, 안전성 강화, 비용 절감이라는 운영 성과로 이어지며, 광산 무인화의 실질적 확산을 가속화하는 기반으로 작용하고 있다.
다만 현 단계의 무인 적재 시스템은 여전히 완전 자율화 수준에 도달하지 못한 한계가 존재한다. 적재 작업은 정밀한 버킷 제어와 비정형 지형, 장비 간 상호작용 등 복합적인 작업 환경을 수반하므로, 대부분의 시스템이 원격 제어 또는 원격 조종 기반에 머물러 있다. 반면 무인 운반 시스템(autonomous haulage system, AHS)은 자율주행 기술이 상대적으로 성숙하여 24시간 연속 운행이 가능한 안정성을 확보하고 있다는 점에서 기술 성숙도 차이가 확인된다. 따라서 향후 광산의 완전 무인화를 실현하기 위해서는 무인 운반 시스템과 유기적으로 연동되는 무인 적재 시스템의 고도화가 필수적이며, 이를 위해 센서 융합, AI 기반 의사결정 및 제어, 실시간 통신 신뢰성 향상과 같은 핵심 기술의 발전이 요구된다.
본 연구는 무인 적재 기술의 현 수준과 적용 효과, 그리고 제조사별 발전 전략을 통합적으로 검토함으로써 향후 광산 자동화 성숙도 진단, 자율 장비 표준화, 협동 운용 알고리즘 개발 등 후속 연구의 기초 자료를 제공한다. 나아가 본 연구 결과는 안전하고 효율적인 광산 운영 체계를 구축하고, 광산 자율 운영으로의 전환을 촉진하는 기술적·산업적 방향 설정에 기여할 것으로 기대된다.
