1. 서론
2. 근접탐지용 센서의 종류 및 특징
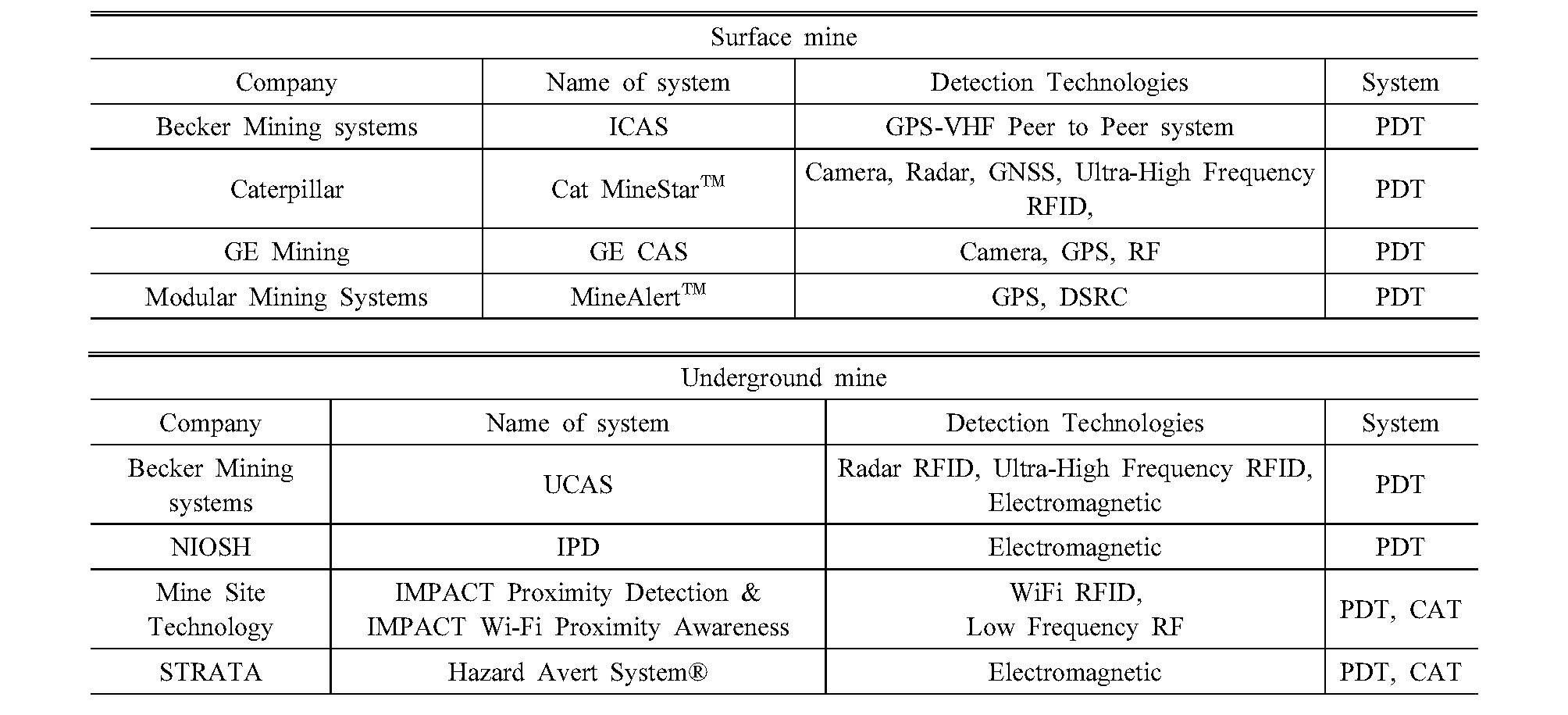
3. 광산장비 충돌방지시스템 개발 현황
3.1 Becker Mining Systems의 U/ICAS
3.2 Caterpillar의 MineStarTM Detect
3.3 GE Mining의 GE CAS
3.4 Modular Mining Systems의 MineAlertTM
3.5 NIOSH의 IPD
3.6 Mine Site Technology의 IMPACT
3.7 STRATA의 Hazard Avert System
4. 해외 광산현장에서의 충돌방지시스템 적용사례 분석
4.1 Goldstrike 광산 적용사례
4.2 George Fisher 광산 적용사례
5. 국내 타 분야의 충돌방지시스템 개발 현황
5.1 굴삭기 작업 시 장애물 탐지 기술 개발
5.2 철도 선로변 유지보수를 위한 양방향 안전설비 개발
6. 결론
1. 서론
광산현장에서는 제한된 시야와 협소한 작업환경으로 인해 장비와 장비, 장비와 작업자간의 충돌사고가 빈번하게 발생한다. 미국 질병통제예방센터(Centers for Disease Control and Prevention, CDC) 광산재난통계에 따르면 1984년 이후 미국 지하광산 현장에서 채광장비와 관련한 충돌사고로 37명의 사망자가 발생하였고, 특히, 2000년부터 2010년까지 셔틀카와 버킷이 수반된 충돌사고로 작업자 16명이 사망하였다(CDC, 2017).
광산현장에서 발생하는 장비와 장비, 장비와 작업자간의 충돌사고를 방지하기 위해 미국, 호주 등 해외 광업선진국들에서는 광산장비 충돌방지시스템(Collision Avoidance System, CAS)을 개발해왔다. 이 시스템은 광산장비에 탑재된 다양한 센서들을 이용하여 주변에서 접근하는 다른 장비나 작업자를 탐지한 후, 충돌사고 위험시 경고 신호를 보내거나 장비의 동작을 자동적으로 멈추게 한다.
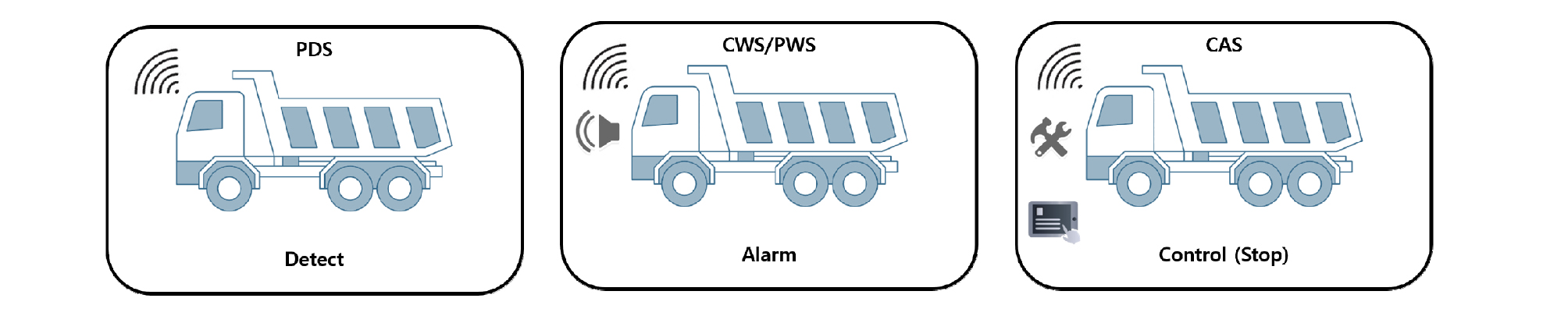
호주에서는 광산장비 충돌방지시스템을 근접탐지기술(Proximity Detection Technology, PDT), 근접인식기술(Proximity Awareness Technology, PAT), 충돌방지기술(Collision Avoidance Technology, CAT), 안전준수기술(Safety Adherence Technology, SAT)이 유기적으로 결합된 시스템이라 정의하였다(NSW Government Trade & Investment Mine Safety, 2014). 여기서 근접탐지기술이란 센서를 이용하여 장비나 작업자의 접근을 탐지하는 기술이며, 근접인식기술은 후진 미러, 사이렌, 섬광 등을 이용하여 다른 장비나 작업자의 접근 사실을 장비 운전자에게 인지시키는 기술이다. 충돌방지기술은 충돌위험시 장비가 스스로를 제어하여 충돌을 회피하는 기술이며, 안전준수기술은 사후분석과 교육을 위해 장비의 작동을 기록하고 추적하는 기술이다. 미국에서도 유사한 의미로 근접탐지시스템(PDS), 충돌경고시스템(CWS), 근접경고시스템(PWS), 충동방지시스템(CAS) 등의 용어가 사용되고 있다(Fig. 1, Ruff, 2007, Ruff, 2010).
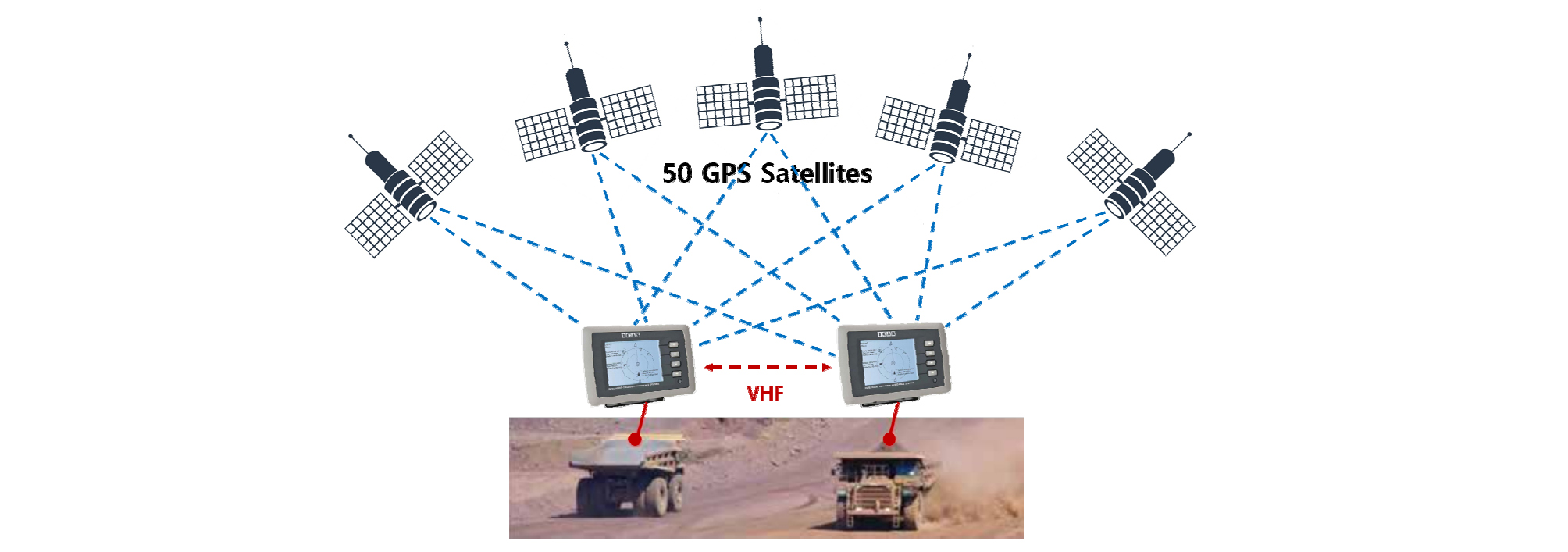
미국 국립산업안전보건연구원(National Institute of Occupational Safety & Health, NIOSH)에서는 노천광산과 지하광산에서 사용되는 충돌방지시스템 개발과 관련한 다수의 연구를 수행하였다. Ruff(2000)는 50톤 덤프트럭에 상업적으로 이용 가능한 센서들을 부착하여 운전자 시야의 사각지대에 있는 다양한 높이와 너비의 장애물을 감지하는 실험을 수행하였다. 또한, 실험결과를 바탕으로 센서를 이용한 근접탐지기술의 신뢰성과 오경보율에 대해 분석하였다(Ruff, 2001). Ruff and Hession-kunz(2001)는 무선식별시스템(Radio Frequency IDentification, RFID)을 이용한 근접탐지기술을 개발하였고, 성능 실험을 통해 문제점을 분석하였다. Schiffbauer(2001)는 자기장 송수신장치를 이용하여 연속채광기(Continuous Mining Machine, CMM)에 접근하는 장비나 사람을 탐지할 수 있는 Hazardous Area Signaling and Ranging Device(HASARD) 시스템을 개발하였다. Ruff(2002)는 레이더 기반 근접탐지기술의 성능실험을 수행하였다. Ruff and Holden(2003)은 위성항법시스템(Global Positioning System, GPS)과 피어 투 피어(peer-to-peer) 통신 기반의 충돌방지시스템을 개발하였다. 이 시스템은 노천광산에서 장비와 장비간의 충돌사고를 예방하는 것에 초점이 맞춰져있었다. 그 외에도 충돌방지시스템 개발을 위해 사용될 수 있는 다양한 근접탐지 센서들에 대한 비교실험이 수행되었다(Ruff, 2004, Ruff, 2006). 최근에는 자기장 기반의 HASARD 시스템의 단점을 보완할 수 있는 전자기 방식의 새로운 충돌방지시스템이 개발되고 있다(Bissert et al., 2016, Ducarme et al., 2016). 해외에서는 광산장비 충돌방지시스템과 관련한 다수의 특허들이 등록되었다(Sims, 1986, McCullough et al., 1995, Gross et al., 2001, Frederick et al., 2003, Young, 2006). 그러나 국내에서는 광산장비 충돌방지시스템 개발과 관련한 연구가 미흡한 실정이다.
본 연구의 목적은 현재까지 개발된 광산장비 충돌방지시스템의 현황을 조사하여 그 특징을 분석하는 것이다. 해외 광산현장에서 충돌방지시스템을 도입하여 사용하고 있는 사례들에 대해 분석하였고, 국내의 경우 광업 분야 이외에 건설 및 철도 분야의 충돌방지시스템 개발 사례를 조사하여 논문에 제시하였다.
2. 근접탐지용 센서의 종류 및 특징
다양한 용도나 환경에 적합한 충돌방지시스템을 설계하고 개발하기 위해서 적절한 센서 기술을 선택하는 것은 매우 중요하다. 따라서 다양한 종류의 센서 별로 어떠한 특징을 갖는지, 어떠한 환경에 활용될 수 있는지 알아볼 필요가 있다. 충돌방지시스템에서 대표적으로 사용되고 있는 센서 기술은 전자기(electromagnetic), GPS, 레이더(radar), RFID, Wi-Fi 등이 있다. 최근 노천 및 지하 광산에서 사용되고 있는 센서 기술을 Table 1에 요약하였으며, 각 기술의 특징은 다음과 같다.
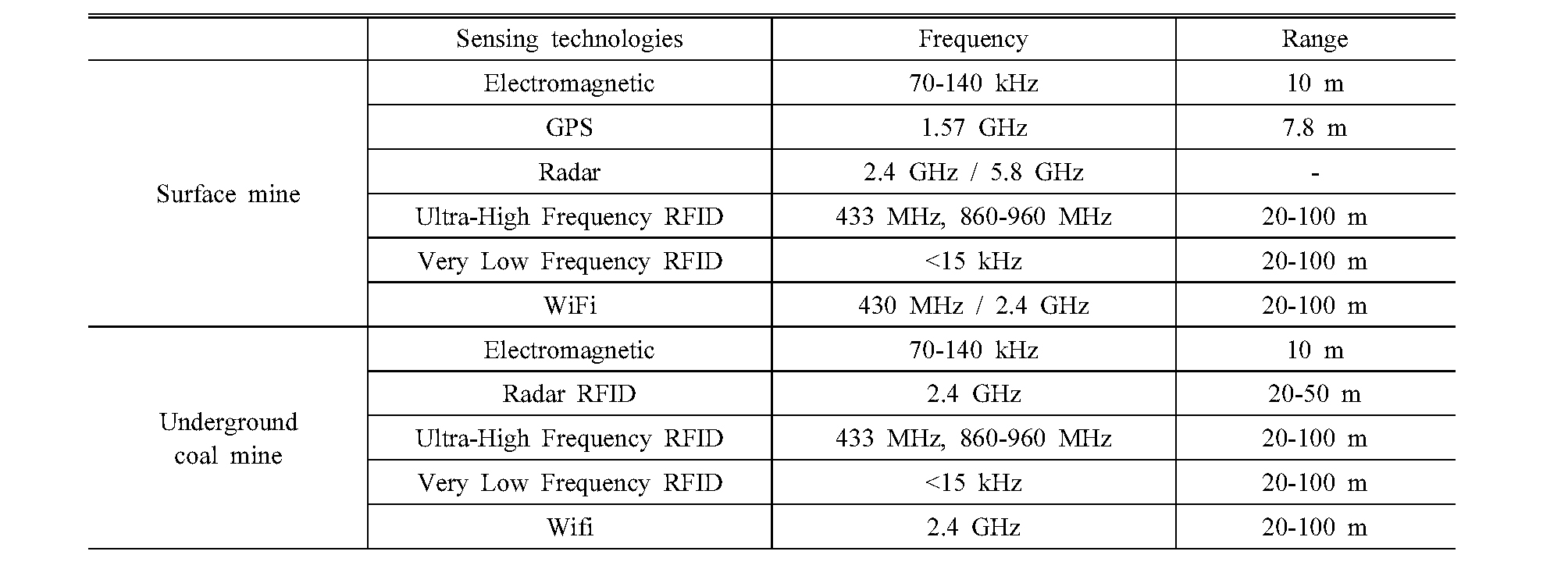
전자기식 센서 기술은 주로 초근접탐지에 이용된다. 센서가 부착된 장비에서 전자기장을 발생시키면 장비로부터 10 m 내의 물체(object)를 탐지하거나 다른 장비에 탐지될 수 있다. GPS의 경우 위성항법시스템을 기반으로 제공하는 위치 및 시간 정보를 이용한다. 2008 표준 포지셔닝 서비스(Standard Positioning Service, SPS) 성능 표준에 따라 사용자 오류 범위(User Range Error, URE)의 정확도가 95% 신뢰수준에서 약 7.8 m 정도를 측정 기준으로 한다(Brent et al., 2017). 중간급의 범위를 이용하므로 노천광산에서는 가능하지만 지하광산에는 가시거리 내에서 통신이 가능해야 하기 때문에 사용할 수 없다. 레이더 센서 기술은 설정된 주파수에서 신호를 생성하여 되돌아오는 에코를 측정하며 지하광산 환경의 20-50 m 거리 내에서 탐지될 수 있다. 이 기술은 단독으로 사용 가능하며, RFID 태그와 함께 사용할 수도 있다. 극초단파 RFID는 근접탐지 방법에서 가장 흔히 사용하는 기술로서 무선신호를 반응범위 내에 있는 RFID 태그에 송신하여 탐지한다. 노천광산이나 지하광산 환경에서 20-100 m 범위에 존재하는 객체의 탐지가 가능하다. 초저주파 RFID도 극초단파 RFID와 비슷한 작동 원리를 갖고 있다. WiFi 기술은 무선어댑터를 이용하여 신원정보를 무선신호로 변환하고, 특정 주파수를 라우터로 전송한다. 극초단파 RFID와 마찬가지로 노천광산이나 지하광산 환경에서 20∼100 m 범위에서 탐지된다(Dunn et al., 2016).
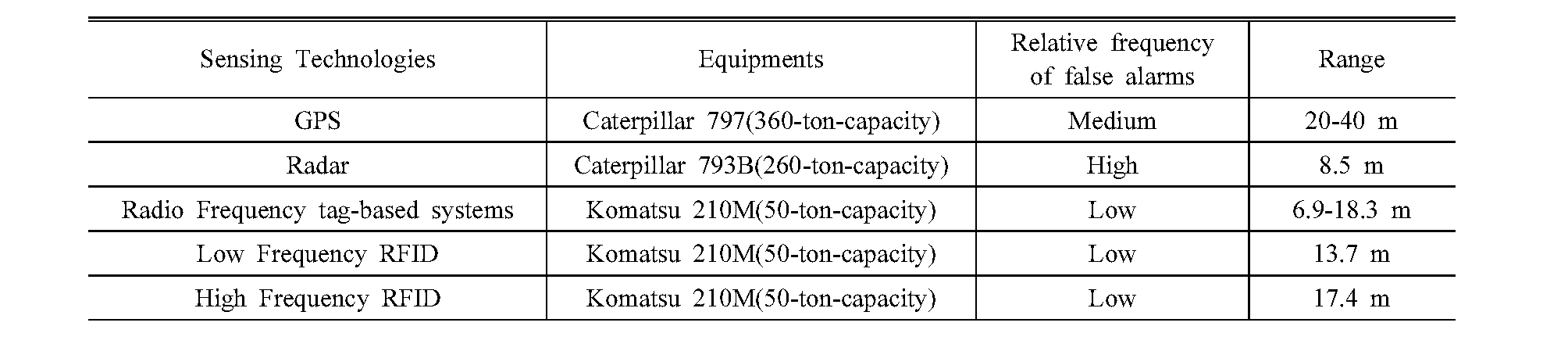
미국의 NIOSH에서 충돌방지시스템에서 사용되고 있는 센서들을 장비에 부착하여 실험을 수행한 사례도 있다. 테스트 대상 센서로는 GPS, 레이더 시스템과 RFID 태그 기반의 시스템 등이 있으며, 각각의 센서 기술 별 테스트 결과를 Table 2에 요약하였다. 레이더 시스템은 사람이나 크기가 작은 장비를 탐지하는데 효과적이다. 또한, 잘못된 알람과 불필요한 알람이 자주 발생할 수 있기 때문에 카메라와 같은 촬영기기를 함께 사용하는 것이 보다 효과적이다. 태그기반의 시스템은 잘못된 알람이 발생하는 경우가 적지만 추가적인 통신시스템이 필요하므로 일반적으로 레이더 시스템보다 비용이 많이 드는 단점이 있다(Ruff, 2000, Ruff, 2002, Ruff, 2007).
3. 광산장비 충돌방지시스템 개발 현황
3.1 Becker Mining Systems의 U/ICAS
Becker Mining Systems(2017a, b)에서 개발한 충돌방지시스템은 지하광산용과 노천광산용으로 구분된다. 지하광산에서 사용하는 충돌방지시스템인 Underground Collision Avoidance System(UCAS)은 세 종류의 근접탐지 기술(극초단파 RFID, 레이더 RFID, 전자기장)을 사용한다. 세 종류의 근접탐지 기술을 함께 사용했기 때문에 광산장비의 유형에 따라 근접탐지 구역을 쉽게 변경할 수 있다. UCAS를 구성하는 주요 부품은 Fig. 2와 같다. UCAS에는 차량용 태그(vehicle tag), 컨트롤 태그(control tag), Tag Cap Lam Type 3(TCT3) 태그가 사용된다. 차량용 태그는 광산장비에 부착되며 충돌위험시 장비의 전원공급 장치를 차단하는 역할을 한다. 컨트롤 태그는 컨트롤러에서 발생하는 청각적 신호를 켜고, 끄는 용도로 사용한다. TCT3 태그는 세 종류의 탐지기술이 결합된 태그로 어떤 안테나를 설치하는지에 따라 장단점이 달라진다.

UCAS는 광산의 환경에 따라 레이더 RFID 안테나나 극초단파 RFID 안테나, Electromagnetic Point of Detection(EPOD) 안테나를 사용한다. 레이더 RFID는 0.5 m의 정밀도로 50 m까지 태그를 탐지할 수 있다. 극초단파 RFID는 태그 탐지거리가 100 m로 상대적으로 길지만 정밀도가 낮고 금속물질에 민감하다. EPOD 안테나는 저주파의 자기장을 발생시키며 탐지거리가 짧지만 금속물질의 영향을 받지 않는다.
노천광산에서 사용하는 충돌방지시스템인 Intelligent Collision Avoidance System(ICAS)는 GPS와 초단파 피어 투 피어 통신을 이용한다. 방위 센서가 달린 GPS 안테나와 초단파 휩 안테나가 광산장비에 탑재되며 충돌위험시 지능형 그래픽 디스플레이를 통해 운전자에게 시각적 신호와 청각적 신호를 제공한다(Fig. 3). ICAS 시스템은 360° 영역을 실시간으로 탐지하며, 탐지거리는 최대 20 km이며 정밀도는 1 m 내외이다.
3.2 Caterpillar의 MineStarTM Detect
Caterpillar에서 개발한 MineStarTM 시스템의 세부 모듈로서 Detect는 충돌방지시스템의 기능을 제공한다(Mining Magazine, 2016). Detect 모듈은 근접탐지기술을 기반으로 물체감지(object detection) 기능, 근접인식(proximity awareness) 기능, 개인(personnel) 기능을 제공하며, 사용 목적에 따라 시스템에서 필요한 기능을 선택하고 설정할 수 있다(Caterpillar, 2014).
물체감지 기능은 운전석에 설치된 디스플레이와 광학 카메라와 레이더 기술을 이용하여 규모가 큰 장비를 인식하고 다른 물체와 충돌하는 것을 막는다. 이 기능은 운전석에 설치된 디스플레이에 실시간 영상과 충돌방지를 위한 시각적 신호와 경보음을 제공한다. 이때, 레이더는 두 가지 모드로 작동되는데 속도 기반 모드는 장비가 규정된 제한속도를 초과할 때 대기 시스템으로 만든다. 거리 기반 모드는 정해진 거리를 이동한 후에 대기 시스템을 활성화시킨다. 대기 시스템이 활성화되면 카메라는 작동하지만 레이더는 더 이상 물체를 감지하지 않는다.
근접인식 기능은 위성위치 측정 시스템(Global Navigation Satellite System, GNSS) 기반의 기술로서 작업자가 운전석에 설치된 디스플레이를 통해 근처에 있는 다른 기계의 위치를 확인하여 근거리에 위치할 경우 타 작업자에게 경고를 하면서 장비와 규모가 작은 차량을 찾아낼 수 있도록 도와준다. 근접인식 기능을 물체감지 기능과 함께 사용하면 보다 효과적인 작업자의 보호가 가능하다. 기계에 시동을 걸거나 느린 속도로 작동을 하는 기계 주위에 물체가 감지되면 물체감지 기능이 장비를 운전하는 작업자에게 경고한다. 반면, 근접인식 기능은 장비가 가동중인 경우 항상 작동한다.
개인 기능은 장비가 운전 중인 도로의 사각지대에 있거나 급하게 경로를 바꿔야 할 때 도움을 준다. 배터리를 충전할 필요가 없는 수동형 RFID 태그를 작업자의 안전조끼나 안전모에 장착하고 극초단파 안테나가 RFID 태그를 감지하면 작업자와 지상 근무자에게 경고 신호를 준다(Fig. 4).

3.3 GE Mining의 GE CAS
GE Mining의 충돌방지시스템은 사각지대(blind spots)에서 장비-장비, 장비-인프라, 장비-작업자간의 상호작용을 위해 개발되었다(Mining Magazine, 2016). 전 세계 35개의 광산에서 설치되어 운행되고 있으며 Anglo American, BHP Billiton, Rio Tinto, Newmont Mining 등 많은 회사에서 사용하고 있다. 이 시스템은 근접탐지기술을 이용하는 GPS 기반의 충돌방지시스템으로 실시간으로 예측 가능한 근접 경고를 제공하고 웹 기반의 기록을 통해 차량을 추적한다. 이 시스템의 기본적인 원리는 Fig. 5에 나타나있다. 장비에 GPS 수신기와 디스플레이, 무선주파수 근접센서, 카메라를 설치하여 차량 주위의 임계 구역(critical zone)에 있는 물체를 자동적으로 감지하여 운전자에게 경고음을 들려주고 디스플레이에 레이더 정보를 보여준다.
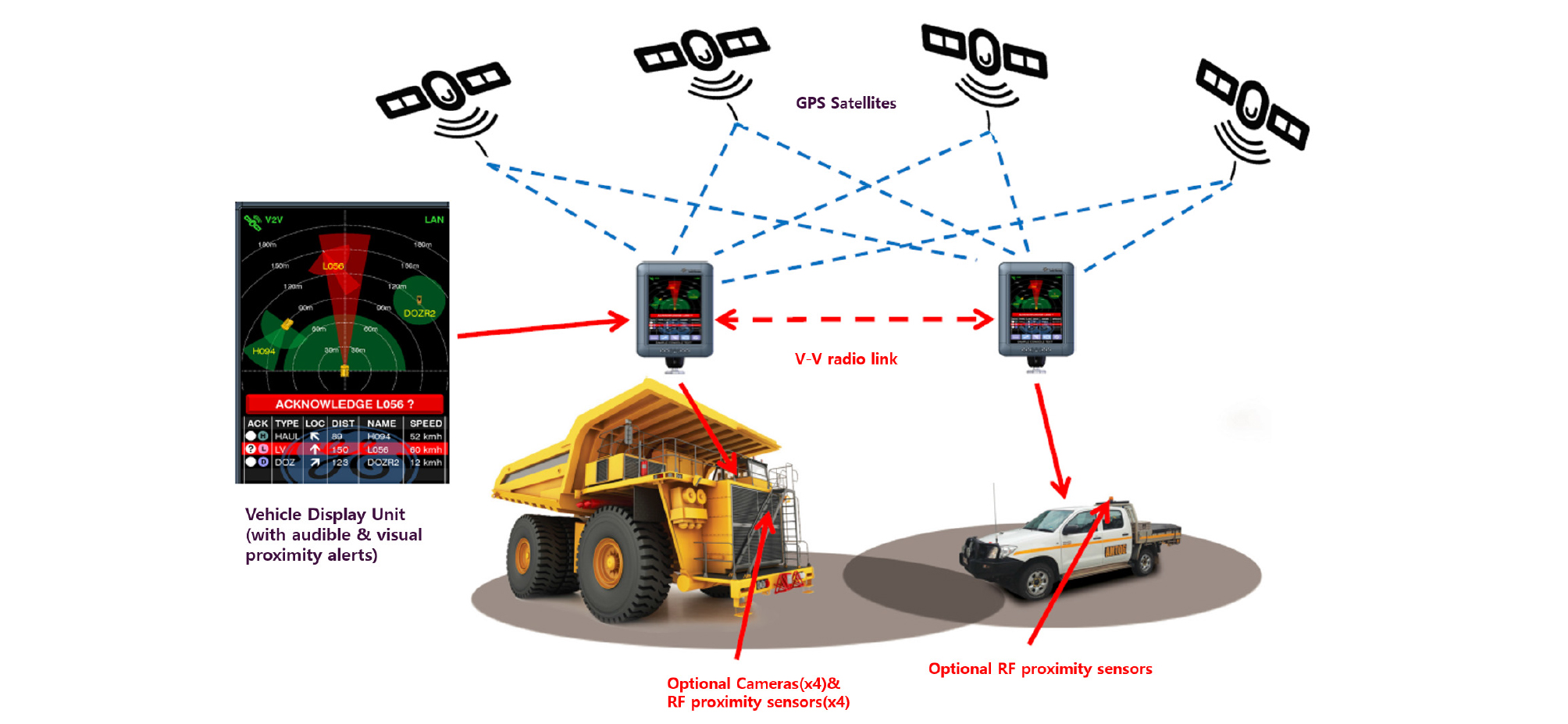
차량에 설치하는 고감도 GPS 수신기는 대부분의 인공위성과의 수신 기능을 지원하고 장비-장비 간의 무선통신은 선택된 안테나의 전력 출력수준에 따라 최대 500 m 거리까지 가능하다. 무선주파수 근접 센서는 2 m의 정밀도로 0-400 m 범위를 측정한다. 카메라는 0.03 Lux까지 작동하고 시야각도는 123°이며 충격에 잘 견딜 수 있다. 무선주파수 근접 센서와 카메라는 장비의 크기에 따라 설치 가능 개수가 달라진다. 예를 들어 운반트럭은 전·후·좌·우에 무선주파수 근접 센서와 카메라를 4개씩 설치한다(GE MINING, 2013).
장비-작업자 간의 작업자를 보호하는 시스템은 규모가 큰 장비가 감지되었을 때 진동과 경고 알람이 울린다. 장비에는 자기 안테나와 루프 안테나, 계기 장치, 메인 제어장치를 설치하고 작업자는 안전모나 벨트에 능동형 태그를 부착한다. 넓은 범위에서는 50 m 까지, 가까운 범위에서는 15 m 까지 탐지가 가능하다.
3.4 Modular Mining Systems의 MineAlertTM
Modular Mining Systems 사의 MineAlertTM Collision Awareness System은 근접탐지기술을 이용하여 차량과 차량 사이의 충돌 위험성을 방지하는데 중점을 두고 있는 조기 경보시스템으로 GPS 수신기와 거리 센서를 이용하는 다중 탐지 접근법을 사용한다(John, 2016). 또한 패턴 인식 알고리즘인 지능형 경로 예측과 시나리오를 바탕으로 차량의 충돌 위험성을 알려준다. 충돌 위험을 최소화할 목적으로 경고와 정보를 작업자에게 대기 없이 바로 알리기 위해 자동차 어플리케이션을 위해 개발된 피어 투 피어 방식의 안전한 통신 표준인 단거리전용 통신기술(Dedicated Short-Range Communications, DSRC)을 사용하였다. 근접탐지에만 초점을 맞추는 일부 시스템들과 달리, 거짓 알람 수를 줄이기 위해 지능형 필터링 시스템을 사용하여 실제와 인위적인 충돌 위협을 구별한다. 차량관리시스템인 DISPATCH와 통합하여 사용할 수 있다(Mining Magazine, 2016).
3.5 NIOSH의 IPD
미국 NIOSH의 the Office of Mine Safety and Health Research (OMSHR)은 광산 현장을 포함한 일반 산업현장에서 발생하는 안전과 관련된 기준들을 정립하고 연구하는 기관으로서 1990년대 이후부터 전자기식 근접탐지기술을 개발하고 있다. 자기장을 이용하는 전자기식 근접탐지 기술은 장비의 성능이나 기능에 따라 자기장 영역의 모양이 변화될 수 있지만 작업자의 위치와 상관없이 장비의 기능들을 선택적으로 정지시키지는 못한다. 이러한 한계를 해결하기 위해 진보된 근접탐지기술로 Intelligent Proximity Detection (IPD) 기술을 개발하고 있다(Jobes et al., 2012). IPD 기술은 CMM 근처에서 일하는 작업자의 위치를 확인할 수 있어서 불필요한 알람을 최소화시킬 수 있고, 기계를 중단할 필요 없이 작업자를 보호한다. 이 기술을 이용하기 위해서는 자기장을 발생시키는 송신기를 CMM에 설치하고 작업자는 개인알람디바이스(Personal alarm device, PAD)를 작업복에 부착한다. CMM의 송신기에서 자기장이 발생되면 3차원 자기장 Shell이 형성되고, PAD가 자기장 신호를 수신한다. CMM과 PAD의 거리가 가까워졌을 때 PAD가 자기장의 강도를 측정하여 장비나 작업자의 위치를 알 수 있다.
IPD 기술은 미국 피츠버그에 있는 NIOSH의 OMSHR 연구실에서 수행된 Joy Global의 14CM-9 CMM 기기 성능 시험을 통해 입증되었다(Fig. 6). 탐지 기술의 정밀도를 향상시키기 위해 현재도 꾸준히 성능 실험을 하고 있고 자기장 모양과 크기 형성 등 자기장 모델과 관련된 연구들을 하고 있다(Li et al., 2012).

3.6 Mine Site Technology의 IMPACT
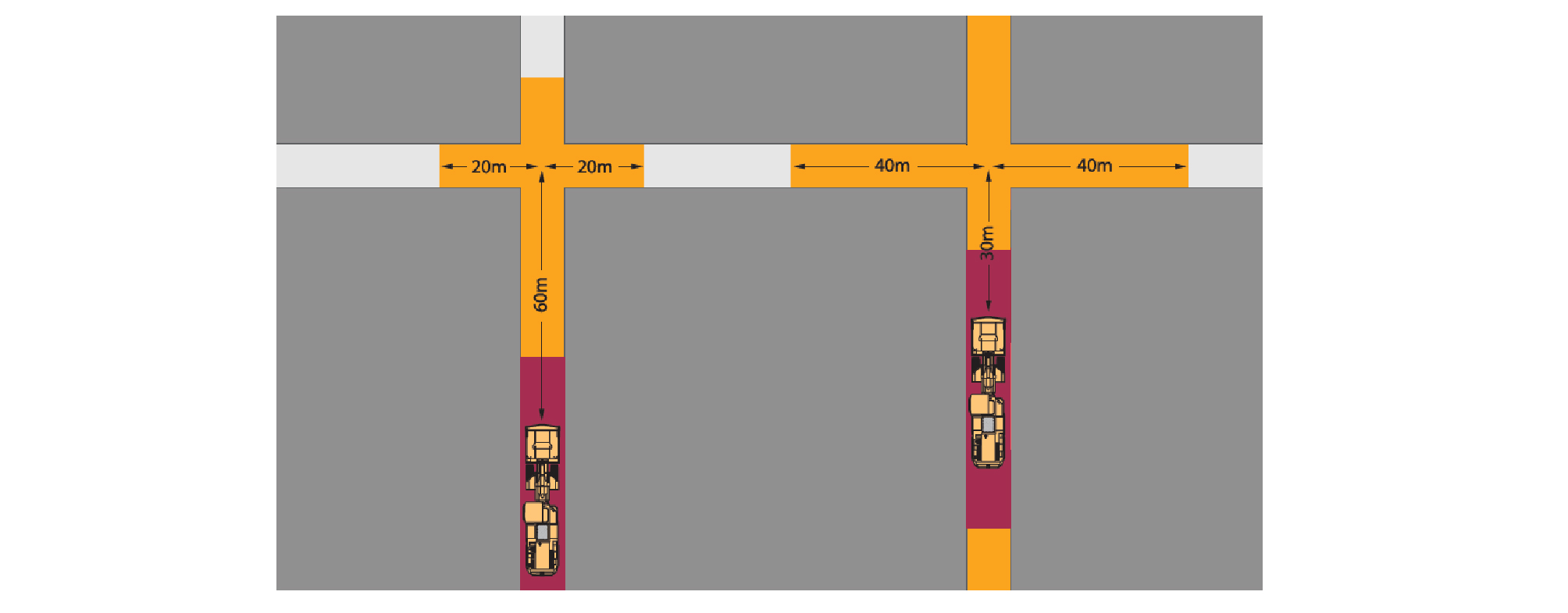
Mine Site Technology(MST)에서 개발한 충돌방지시스템은 근접탐지기술(IMPACT Proximity Detection)과 충돌방지기술(IMPACT Wi-Fi Proximity Awareness)을 포함한다(MST, 2016a; 2016b). 지하광산에서 사용 가능하며, 두 시스템을 함께 사용하거나 둘 중에 하나만 사용해도 된다. IMPACT Wi-Fi Proximity Awareness은 장비 운전자에게 조기 경고를 제공하여 장비-장비, 장비-작업자 간의 충돌 위험성을 줄일 수 있도록 제작되었다. 이 시스템은 IMPACT Vehicle Intelligence Platform(VIP)과 Wi-Fi 능동형 RFID 태그를 이용한다. 태그의 신호를 감지하고 탐지 영역을 제어하는 IMPACT VIP와 터치스크린 디스플레이, 태그를 장비에 설치하고, 작업자의 옷에 태그를 부착한다. Wi-Fi 신호는 교차로 주위에서 20-40 m 정도 전파하여 교차로에서 갑자기 들어오는 작업자나 장비로 인한 위험이 줄어든다(Fig. 7). 또한, 디스플레이를 통해 탐지영역 내에 있는 장비와 작업자를 구별하여 확인할 수 있다.
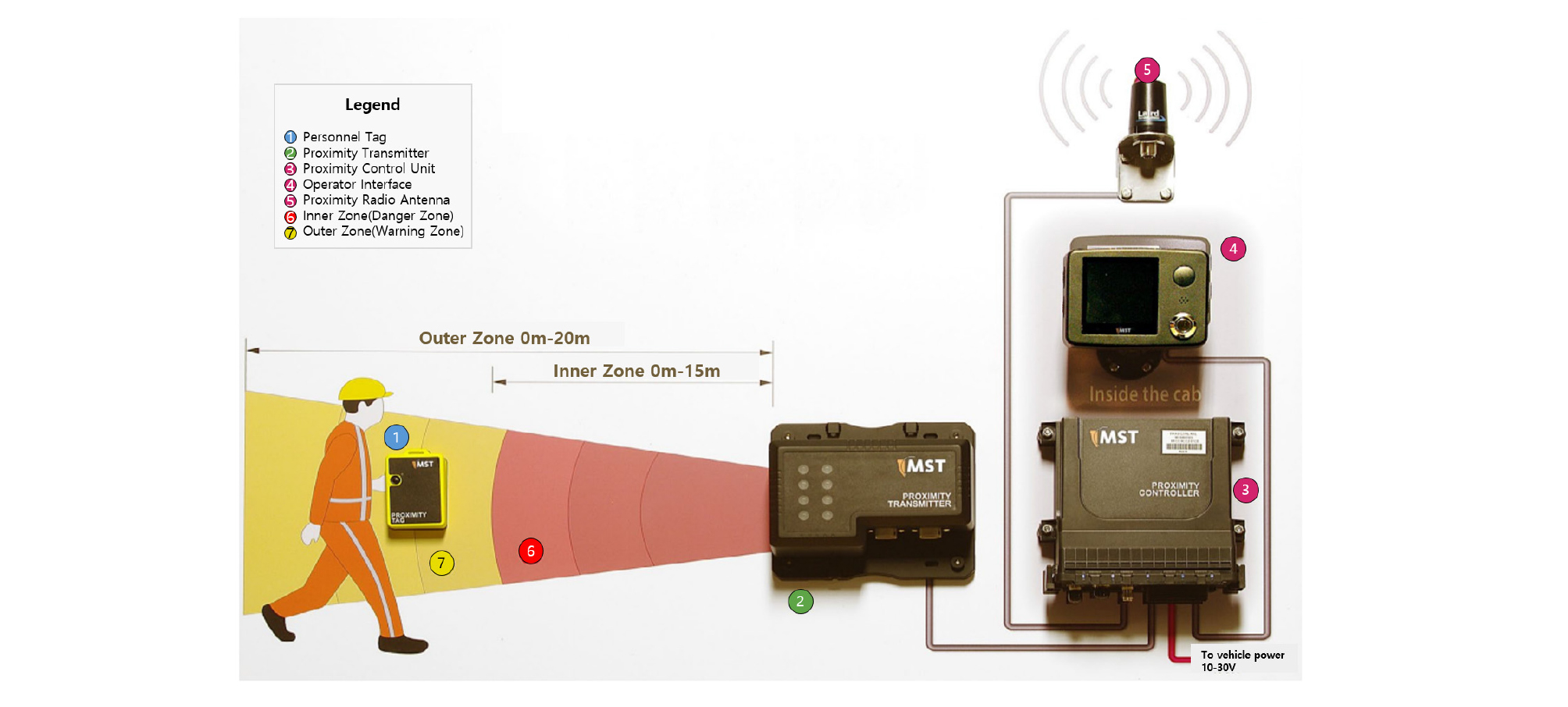
MPACT Proximity Detection 시스템은 장비 운전자와 장비 근처에서 작업하는 작업자에게 충돌 위험성을 알려준다. 이 시스템은 작업자의 작업복이나 안전모에 신호를 수신할 수 있는 태그를 부착하고 장비에 디스플레이와 근접컨트롤러, 저주파수 송신기를 설치한다(Fig. 8). 태그는 12시간 배터리를 장착하고 작업자에게 청각적 알람과 진동 알람, LED 알람으로 경고를 준다. 장비 운전자는 장비 근처에 작업자가 감지되면 장비의 운전석에 부착된 디스플레이를 통해 시각적 및 청각적 신호를 제공받는다. 장비의 크기에 따라 최대 4대의 송신기를 사용할 수 있고 장비의 속도에 따라 최대 20 m 까지 탐지할 수 있다. 또한 비, 먼지, 안개의 환경에 영향을 받지 않으며, 안전강화를 위해 장비를 자동적으로 멈추거나 감속시킬 수 있다.
3.7 STRATA의 Hazard Avert System
미국의 STRATA가 개발한 충돌방지시스템, Hazard Avert System®은 근접탐지기술과 충돌방지기술을 포함하고 있으며, 노천광산과 지하광산 둘 다 적용될 수 있다(STRATA, 2017a; 2017b). 이 시스템은 근거리 전자기식 탐지 기법을 이용하여 작업하고 있는 장비 근처 반경에 작업자나 장비가 인식이 되면 청각적 및 시각적 신호로 경고를 주며, 자동적으로 장비를 감속시키거나 정지시킨다. 경고영역(warning zone)과 위험영역(hazard zone) 등 두 단계로 탐지 영역을 나눠서 경고 신호를 준다. 경고영역에 들어가면 장비는 감속되고 디스플레이에 주황색 표시가 나타나며, 위험영역에 진입하면 장비는 감속되다가 정지되고 화면에는 빨간색 표시가 나타난다. 또한, 근처에 있는 장비나 작업자가 정지해 있을 경우에도 탐지가 가능하다.
장비와 장비간의 충돌을 막기 위해 각 장비에 LED 디스플레이를 부착하고 장비 전후에 카메라를 설치한다. 또한 근접 모듈과 인터페이스 모듈을 설치한다. 근접모듈은 전자기장을 발생시키고 다른 장비의 전자기장을 탐지하며, 인터페이스 모듈은 이 시스템의 전반적인 제어를 담당한다. 장비와 작업자 간의 충돌을 막기 위해 작업자는 벨트에 PAD를 부착한다(Fig. 9).

4. 해외 광산현장에서의 충돌방지시스템 적용사례 분석
4.1 Goldstrike 광산 적용사례
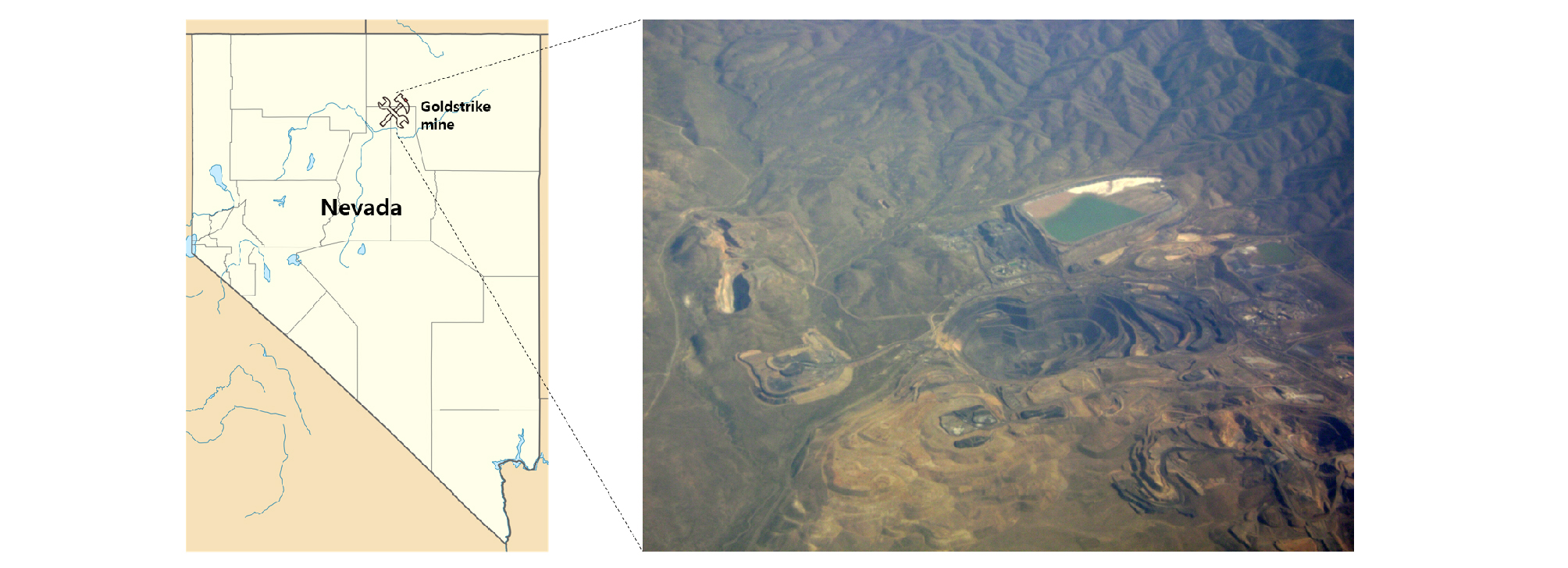
Goldstrike 광산은 미국 네바다 주 유레카 카운티에 위치하고 있으며, Barrick Gold 사에서 운영하고 있는 금 광산이다(Fig. 10). 최근 이 광산에서 대형 장비들 간의 충돌이 발생하였는데 그 원인은 장비의 빠른 이동 속도와 상황인식의 부족으로 밝혀졌다(Modular Mining Systems, 2012). 즉, 운반트럭의 운전자 좌석이 높아서 종종 소규모의 장비가 잘 보이지 않은 것이다. 이를 위해 Modular Mining Systems 사의 차량관리시스템인 DISPATCH에 근접탐지와 속도 알림 모듈을 추가한 충돌방지시스템을 구축하였다 총 33개의 운반트럭에 시스템을 구축한 결과 근접탐지모듈의 GPS 기술로 모든 장비의 위치를 파악할 수 있었고, 레이더와 RFID를 이용하여 장비 근처로 위치하거나 접근하는 물체를 탐지하면 운전자에게 경고를 보냈다. 그 결과 이동하고 있는 장비간의 충돌이 현저히 줄어들었다.
4.2 George Fisher 광산 적용사례
George Fisher 광산은 호주의 북서쪽 퀸즐랜드 내 마운트아이자에서 북쪽으로 20 km 떨어져있고, 전 세계에서 가장 큰 아연, 납, 은 광산이다(Fig. 11). 이 광산은 Xstrata 사에서 운영하고 있으며, 이 회사는 MST의 근접탐지충돌방지시스템을 개발하는데 투자하고 있다. 2008년에 MST의 IMPACT Vehicle Intelligence Platform과 Wi-Fi 능동형 RFID 태그를 이용하는 IMPACT WiFi Proximity Awareness 시스템을 이용하여 종합적인 현장실험을 수행하였다. 그 결과 전방에 위치한 교차로의 90° 코너 방향의 80 m 거리까지 탐지할 수 있었다(Xstrata zinc, 2008).

5. 국내 타 분야의 충돌방지시스템 개발 현황
국내의 경우 광산 분야의 충돌방지시스템에 대한 연구 사례는 찾아보기 어렵다. 반면에 건설 및 철도 현장에서 장비에 의한 재해가 종종 발생하고 있다. 따라서 본 연구에서는 국내 건설 및 철도 현장의 안전을 확보하기 위해 적용한 충돌방지시스템의 사례에 대해 조사하였다.
5.1 굴삭기 작업 시 장애물 탐지 기술 개발
Soh 등(2008)은 토공 현장에서 작업환경 안전 확보를 위해 굴삭기 주변 장애물 탐지를 위한 요소 기술을 개발하였다. 레이저 센서, 초음파 센서 등 다양한 센서들을 비교 분석하고 경제성, 안정성, 응용사례 등을 측면을 종합적으로 고려하여 현장에 적합한 센서를 선정하였다. 선정된 센서 기술은 레이저 센서로 독일 SICK사의 LMS-221이며 최대 80 m 범위에서 180° 방위 탐지가 가능하다. 또한, 굴삭기의 장애물 탐지를 위한 센서 구동 알고리즘과 사용자 인터페이스를 개발하여 성능 실험을 실시하였다.
Soh 등(2010)은 선행연구에서 굴삭 작업영역 전방위에 대한 감지가 불가능하다는 문제점을 보완하기 위해 선정된 센서 기술을 이용하여 2대의 센서를 동시에 구동할 수 있는 알고리즘을 개발하였다. 2대의 센서가 탐지한 신호를 컨버터를 통해 변환하여 제어 PC로 전송한다. 장애물탐지 소프트웨어를 사용하여 데이터를 처리하여 장애물 유무를 판단하고 장애물이 탐지되면 거리에 따라 경고 신호나 긴급정지 신호를 보낸다. 이 알고리즘을 이용하여 사용자 인터페이스에 대해 현장실험을 하고 성능 테스트를 실시한 결과 굴삭기에 설치한 센서의 높이에 따라 굴삭기 주변에 사각지대가 발생하였다.
Choi 등(2011)은 굴삭기의 사각지대를 최소화 할 수 있고 자동화 굴삭기 관리시스템을 적용할 수 있는 굴삭기의 장애물 탐지용 틸트(tilt) 모듈을 개발하였다. 선행 연구에서 선정했던 레이저 센서의 감지 범위가 180°이므로 사각지대 없이 전방위 탐지를 하기 위해 감지 범위가 270°인 독일 SICK사의 LMS-151로 변경하였다. Soh 등(2010)에서 개발한 센서 구동 알고리즘을 사용하여 변경된 센서로 틸트 모듈을 개발하였다. 굴삭기에 틸트 모듈을 설치하고 현장 실험을 통해 성능 테스트를 실시하였다. 작업자가 웅크리고 있는 경우 tilt down을 했을 때 작업자를 탐지할 수 있게 되어 사각지대에 있는 장애물을 탐지할 수 있었다.
5.2 철도 선로변 유지보수를 위한 양방향 안전설비 개발
Hwang 등(2010)은 철도 선로변 유지보수를 하는 작업자와 모터카 사이의 추돌사고 및 모터카들 간의 충돌사고를 줄이기 위한 양방향 무선통신을 이용한 안전설비를 제안하였다. 또한 실제 철도현장의 모터카 운행패턴을 분석하여 모터카와 작업자 단말기간의 경보동작 메커니즘을 설계하고 구현하였다.
양방향 무선통신을 이용한 안전설비는 모터카에 설치되는 차상단말기와 작업자 허리에 부착하거나 목에 걸 수 있는 작업자용 단말기이다. 개발한 시제품에서 사용한 무선신호 주파수 대역은 철도의 다른 설비가 사용하지 않는 424 MHz 대역을 사용하였고, 무선신호 출력은 전파 도달거리가 도시철도 플랫폼의 길이보다 조금 더 긴 거리인 250∼300 m정도가 되도록 10 mW 이내로 조정하였다. 차상단말기는 모터카 차내의 전원을 직접 사용하지만 작업자용 단말기는 휴대용으로 8시간 정도 사용할 수 있는 고용량 충전 배터리를 사용하였다.
개발한 무선통신 기반의 안전설비는 철도 선로변 유지보수 현장에서 발생할 수 있는 다양한 운행 시나리오에 따라 실제 현장에서 필요한 다양한 동작 메커니즘을 분석하고 적용하였다. 기본 메커니즘의 원리는 다음과 같다. 모터카가 작업자 단말기의 전파전달 영역 이내로 접근하게 되면 모터카에서 송신되는 RF 신호가 작업자용 단말기에 수신되고 경보신호를 출력한다. 작업자용 단말기에 바로 피드백 하여 모터카 차상단말기에도 작업자가 있다는 경보를 발생시킨다. 선로변 작업자는 모터카가 접근하고 있음을 인식하고 안전지역으로 대피하게 되는데 대피한 이후에는 작업자용 단말기에 경보중지 버튼을 취급하여 작업자용과 차량용 단말기에 경보신호를 중지시킨다. 앞의 설명한 기본 동작 메커니즘 뿐만 아니라 모터카는 전진 및 후진을 반복하는 등 운행패턴이 다양하므로 추가로 3가지의 경보동작 메커니즘을 분석하고 구현하였다.
경보동작 메커니즘을 반영하여 시제품을 제작하고 철도 운영 현장에서 시험운영을 하였다. 현장시험결과 환경에 따라 최소 전파전달 거리는 다르지만 최대 270 m로 측정되었고, 도시철도 운영기관에서 요구되는 성능을 만족하였다. 또한 서울메트로의 모터카 9대에 설치하여 시범운영하고 있다.
6. 결론
본 연구에서는 충돌방지시스템과 관련된 용어와 센서 기술의 특징에 대해 분석하고, 해외 광업 분야와 국내 건설 및 철도 분야에서 개발된 충돌방지시스템을 조사하였다. 호주와 미국에서 사용하고 있는 용어가 유사했지만 기술의 범위 관점에서는 조금 다른 의미로 정의되어 있는 것을 확인하였다. 충돌방지시스템에서 사용되는 다양한 센서들의 주파수나 탐지 거리 등의 특징을 조사한 결과 광산의 환경과 필요조건에 따라 적합한 센서를 선정하거나 다양한 센서를 통합하여 사용할 수 있음을 알 수 있었다.
해외 광업회사나 연구기관을 중심으로 장비 및 작업자의 안전을 위한 다양한 충돌방지시스템들의 개발사례를 찾아볼 수 있었다(Table 3). 다양한 주파수와 감지 거리를 갖는 센서들이 활용되고 있었으며, 광산 현장의 특성이나 사용 목적에 따라 몇 개의 센서를 통합하여 사용하기도 하였다. 반면 국내 광업 분야에서는 아직 개발 사례를 찾아볼 수 없었고, 건설과 철도 일부 분야에서 유사 기술이 적용된 것으로 조사되었다. 비록 국내 광산들이 해외 광산보다 규모는 작지만 작업자의 안전은 매우 중요한 문제이며 안전은 광산개발의 운영과 작업운영의 측면과도 직결될 수 있다. 최근 국내 일부 광산회사들이 갱내채굴방식을 이용하는 지하광산의 안전관리를 위해 실시간으로 갱내의 작업자와 장비의 위치정보를 알 수 있도록 하는 시스템을 도입하여 사용하고 있다. 그러나 실시간으로 위치를 알 수 있다고 해서 갑자기 발생할 수 있는 작업자와 장비의 안전사고를 방지하기는 어렵다. 따라서 작업자-장비나 장비-장비 간에 충돌을 방지할 수 있도록 해외 사례를 통해 국내 광산 환경에 적합한 센서 기술의 선정에 대한 연구와 충돌방지시스템의 개발이 필요할 것으로 판단된다.