

1. 서 론
2. 기존 이랙터 기초 모델 분석
2.1 EPB-TBM 기초 모델 개요
2.2 이렉터 도면 및 자유도 분석
3. 시뮬레이션 기반의 나선형 세그먼트 조립용 이렉터 시스템 개조
3.1 기존 TBM 시뮬레이션의 한계점
3.2 신규 시뮬레이션 개요
3.3 이렉터 시스템의 개조
3.4 신규 시뮬레이션 개발
3.5 신규 시뮬레이션 결과
4. 결 론
1. 서 론
유럽의 한 제조사가 최근 영국의 터널에 적용된 쉴드 TBM에 반연속굴착기술(Semi-continuous advance technology)을 적용하여 실증에 성공하면서 TBM 업계의 많은 관심을 받고 있다 BBC, 2024). 이 기술은 세그먼트를 체결하는 동안에도 추진잭과 커터헤드를 가동하여 터널을 굴진할 수 있는 것이 특징이다(Kim et al., 2023). 이를 통해, 세그먼트 체결 중 휴식시간을 굴진시간으로 활용하여 굴진율을 대폭 향상시킬 수 있는 것으로 보고된 바 있다(Tröndle et al., 2023). 반연속굴착기술은 일부 세그먼트 체결시간과 링 폐합 시 휴식 기간이 일부 포함되어 있다. 한편, TBM 연속굴착기술은 휴식 기간을 최소화하기 위해 나선형(helical) 세그먼트를 사용하여 거의 연속적으로 세그먼트 체결과 굴진을 동시에 진행하여 굴진시간 비율을 극대화하는 방법이다(Choi et al., 2022). 일반 링타입 세그먼트의 조립에 필요한 이렉터의 사양 및 설계 연구는 기존에 여러 차례 수행되었고(Li et al., 2012; Wang et al., 2017), BIM (Building Information Modeling) 시뮬레이션과 실제 터널 실증을 통해 검증이 완료된 상태이다(Zhang et al., 2023).
한편, 나선형 세그먼트를 사용할 경우 세그먼트 체결 시 헬리컬 각도만큼 정교하게 세그먼트를 회전시킨 후 조립해야 한다. 나선형 세그먼트에 대한 설계 방법과 특허는 수차례 제안된 바 있다(Kim et al., 2023). 하지만 이를 통해 실제 나선형 세그먼트를 조립하는 실험이나 실증 사례는 아직 보고된 바가 없다. 따라서 나선형 세그먼트를 체결하기 위해 기존의 이렉터 시스템을 그대로 사용할 수 있는지, 아니면 어떻게 개조하면 되는지에 대해 알려진 정보나 노하우가 없는 실정이다.
본 연구에서는 나선형 세그먼트를 설치하기 위해 필요한 이렉터 사양 및 자유도를 분석하였다. 이를 통해, 기존 설계안을 통해 조립 가능성을 검토하고, 설계 개조안을 제안하였다. 이렉터 개조를 수행하기에 앞서, 상세 설계안을 3D 모델로 구성하여 나선형 세그먼트의 체결 가능성 및 정확도를 사전 검증하고자 하였다. 이 일련의 과정과 결론을 본 논문에 정리하였다.
2. 기존 이랙터 기초 모델 분석
2.1 EPB-TBM 기초 모델 개요
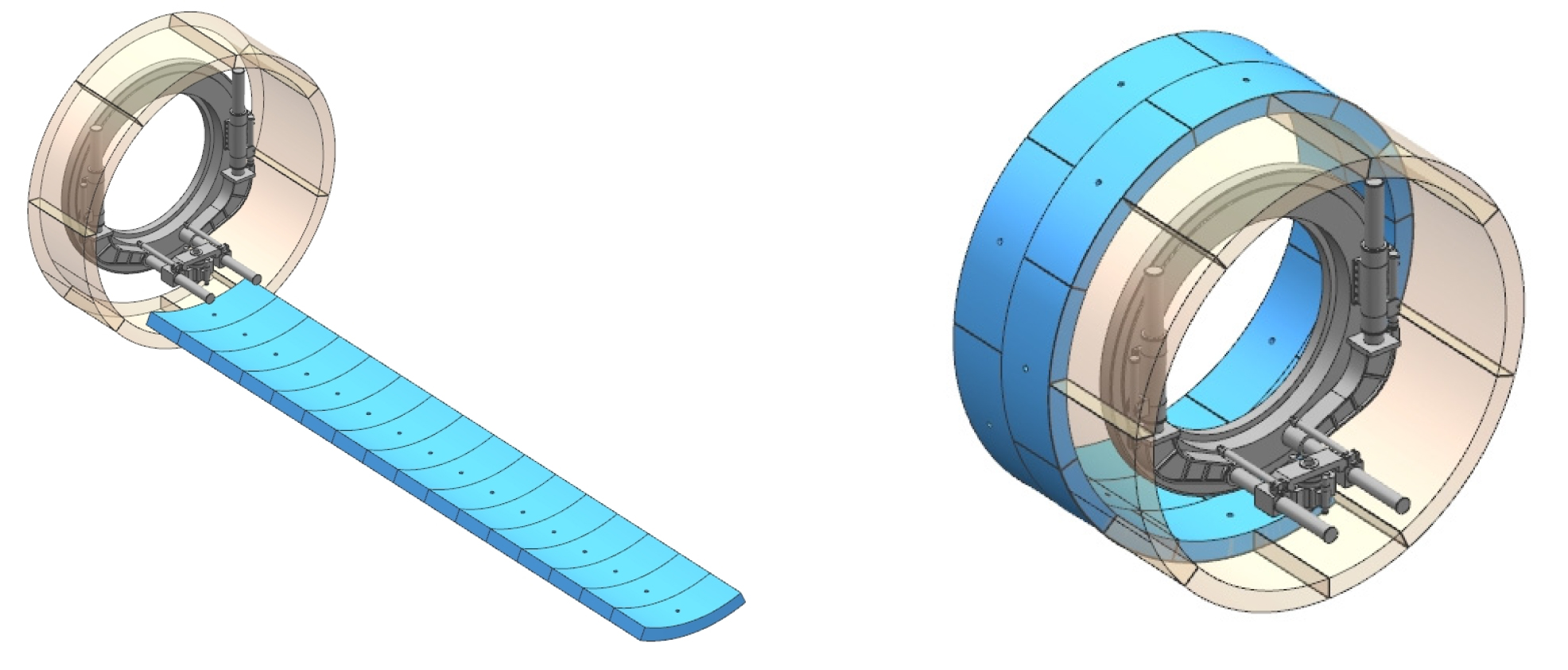
나선형 세그먼트 설치를 위한 이렉터 개조는 일본 K사의 EPB (Earth Pressure Balance) TBM 기초 모델을 기준으로 진행하였다. 역설계된 3D 모델의 등각도는 Fig. 1에 제시하였으며, 각 사양은 Table 1에 요약하였다. 기초 모델의 경우 일반 링타입 세그먼트를 조립하기 위한 이렉터를 보유하고 있다. 나선형 세그먼트 조립 시 문제가 발생하지 않도록 이렉터의 개조를 위해 기존 이렉터의 동작 자유도를 분석을 진행하였다.
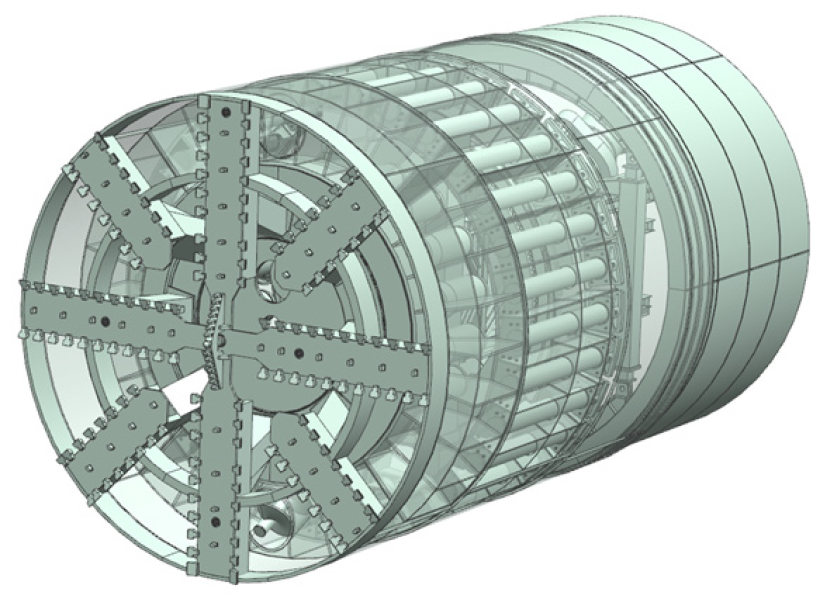
Table 1.
7.9 m diameter EPB-TBM specification
2.2 이렉터 도면 및 자유도 분석
2.2.1 기존 제품 도면
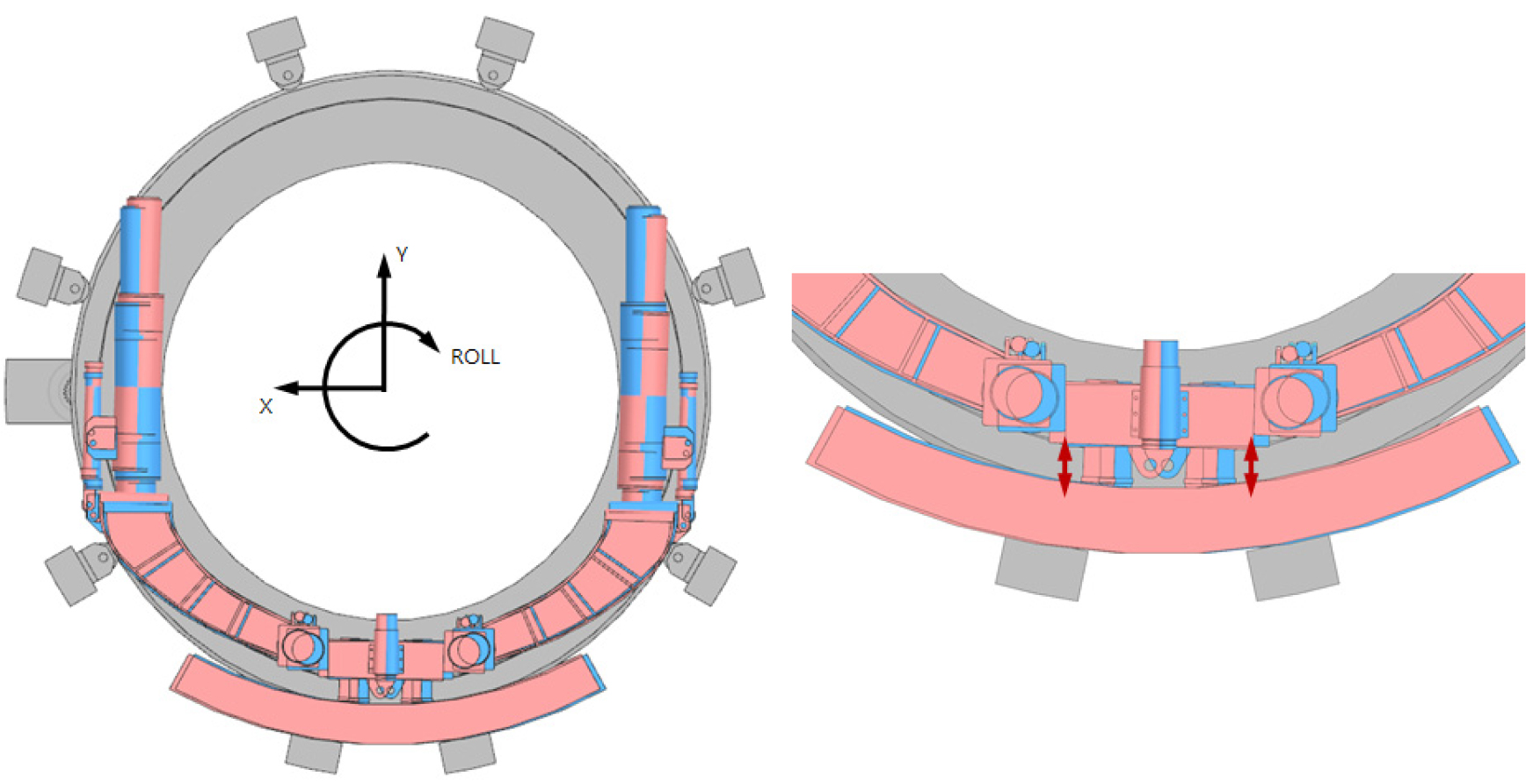
기존 K사의 7.9 m EPB-TBM 자료와 현장 부품 확인을 통해 이렉터의 기본 도면(Fig. 2)을 작성하였다. 또한, 이를 구동하기 위한 개별 액추에이터(Actuator)와 기구 구조를 분석하여 세그먼트 제어를 위한 이렉터의 각 부품별 자유도 및 모션을 검토하였다. 분석 결과, 헬리컬 세그먼트의 접지 및 운반을 위해 이렉터의 Z축 방향 실린더 추가 신장이 필요하였으며, 나선형 경사각의 정밀한 끼워 맞춤 기능을 위해 Y축 회전 운동 제어용 모터를 추가해야 한다는 결론을 도출하였다.

2.2.2 Actuator 모션 분석
개조대상 TBM의 이렉터는 선회를 담당하는 1개의 유압 모터와 직선 운동을 담당하는 4개의 유압 실린더로 구성되어 동작한다. 각 액추에이터의 배치에 따른 역할은 Table 2에 표시하였다. 복합운동에 의해 X, Y, Z축 방향의 선형이동과 해당 3개 축을 중심으로 3개 회전 자유도가 일부 구현은 되는 것으로 분석된다. 하지만, 나선형 세그먼트를 체결하기 위한 Y축 중심의 회전 자유도 기능(yawing)은 거의 구현하기 어려운 것으로 판단되었다. 그래서 2.2.3절에서 동력부품의 운동 자유도와 범위를 좀 더 세밀하게 분석하였다.
Table 2.
Roles of each actuator
2.2.3 선형운동 분석
1) X축 방향 선형운동
이렉터가 회전모터에 의해 Z축 중심으로 반시계 방향으로 90도 회전하면, Cylinder-3가 결과적으로 X축 방향으로 세그먼트를 일부 이송하거나 회전할 수 있다. 그러나 이는 복합 운동을 통해 발생하는 것이고, Cylinder-3의 스트로크는 최대 50 mm이내로 제한적이다(Fig. 3).
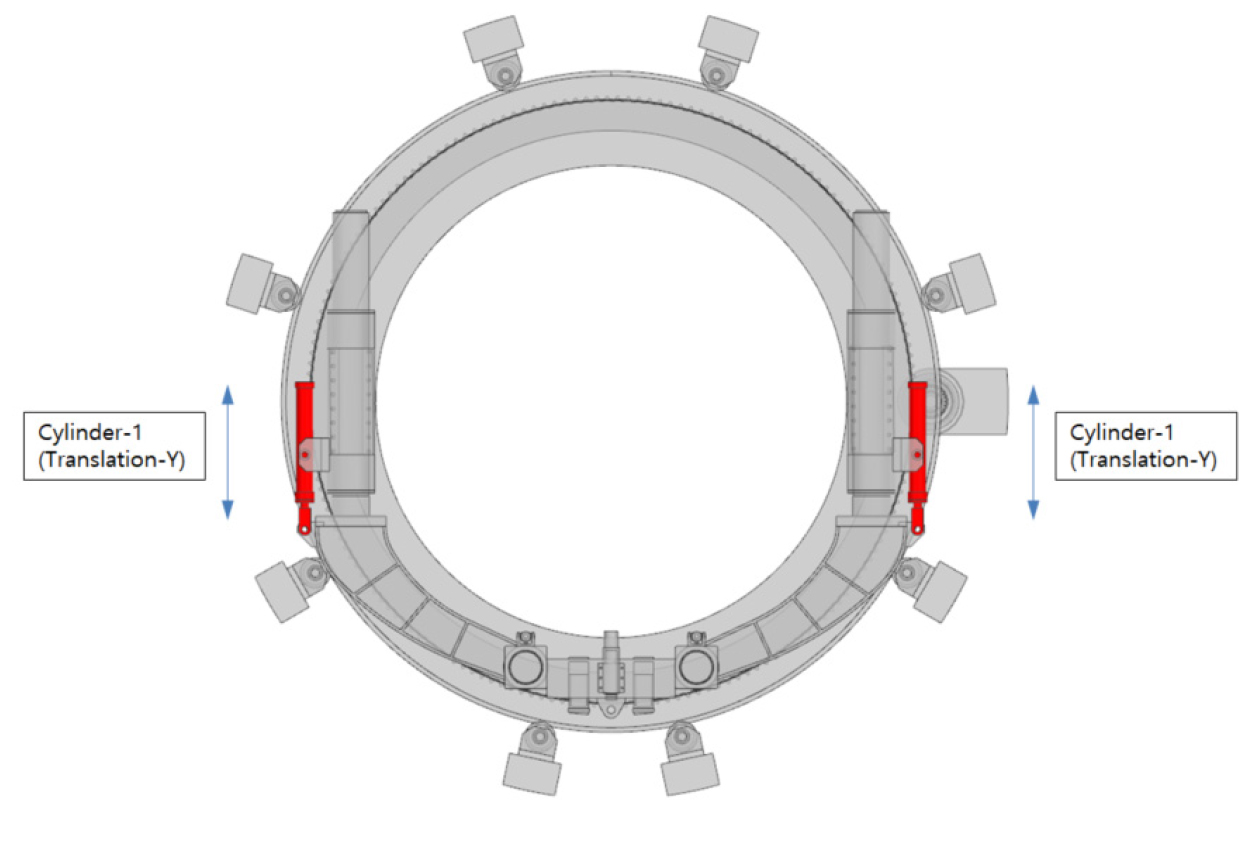
2) Y축 선형운동
이렉터가 회전모터에 의해 Z축 중심으로 반시계 방향으로 90도 회전하면, Cylinder-3가 결과적으로 X축 방향으로 세그먼트를 일부 이송하거나 회전할 수 있다. 그러나 이는 복합 운동을 통해 발생하는 것이고, Cylinder-3의 스트로크는 최대 50 mm이내로 제한적이다(Fig. 4).
3) Z축 선형운동
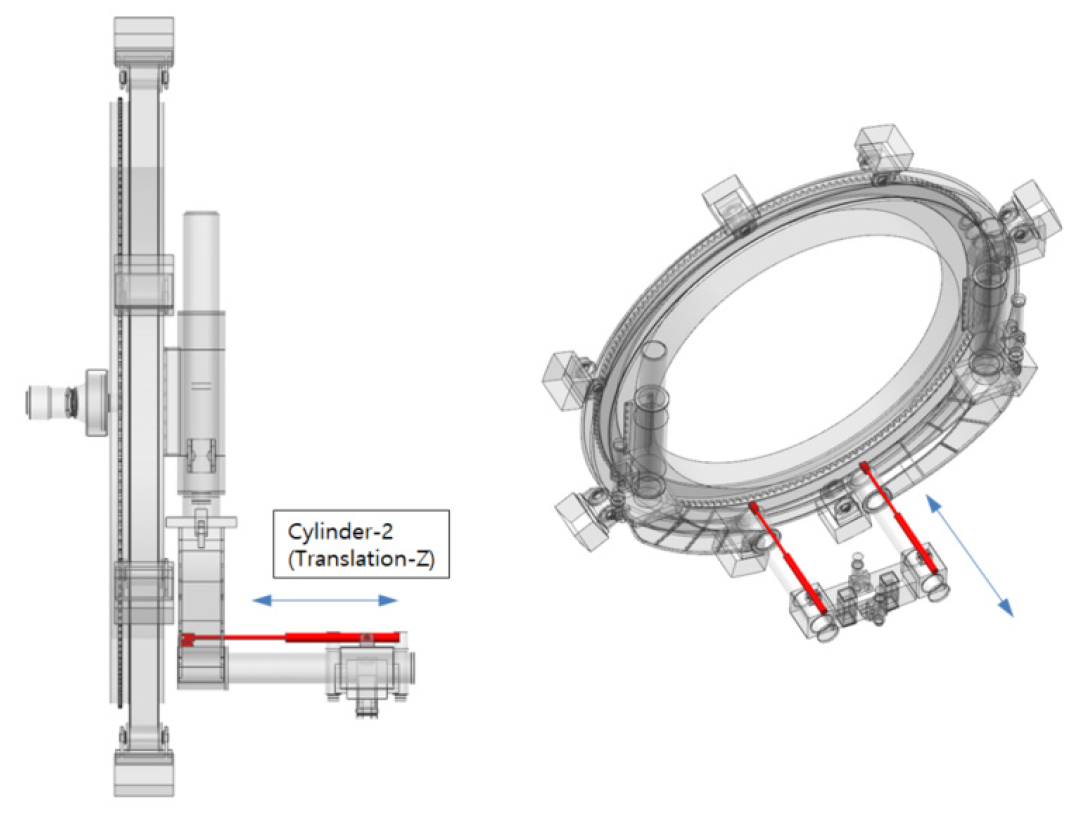
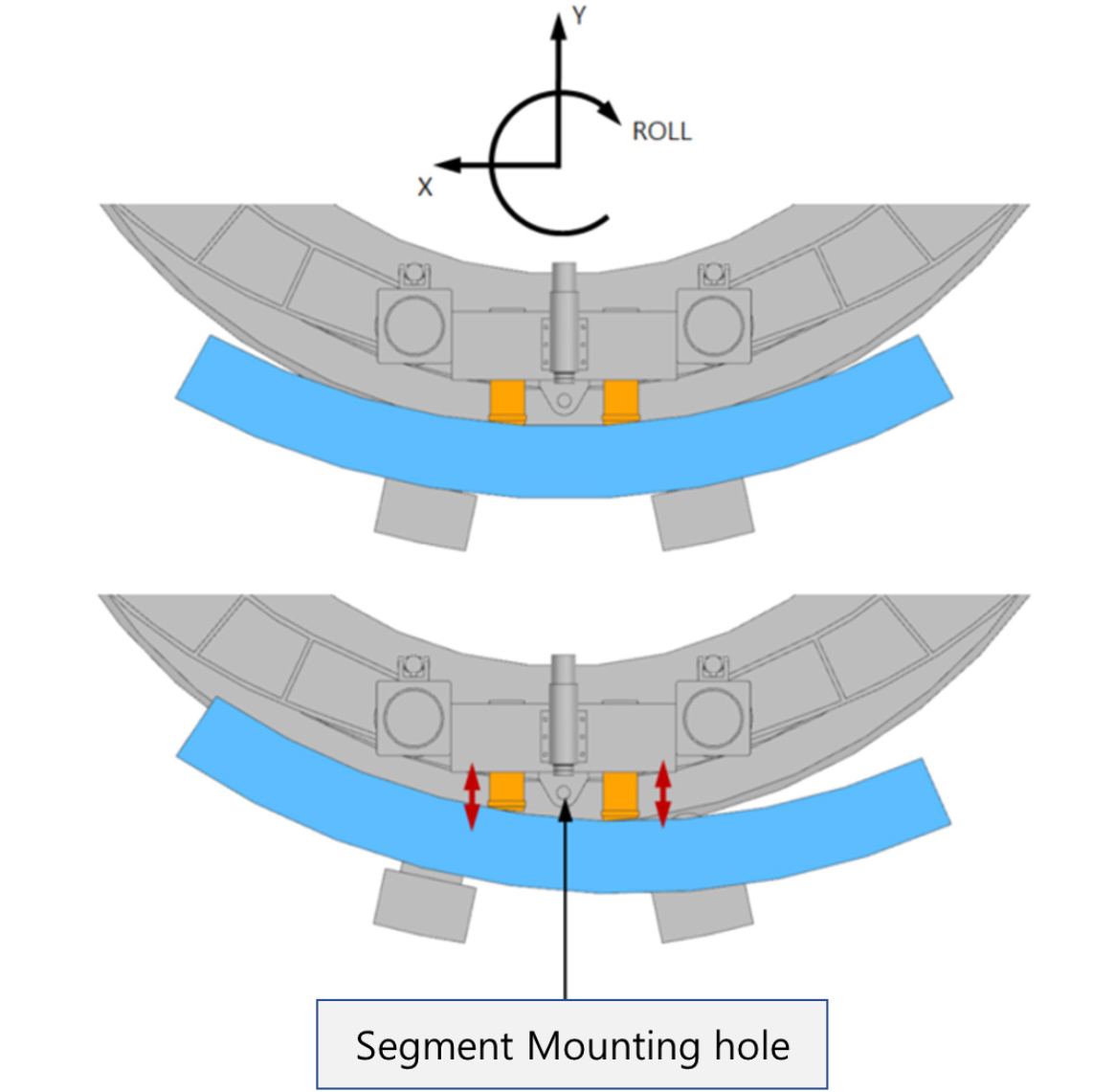
최대 800 mm의 스트로크를 갖는 두 개의 Cylinder-2의 직선 운동을 통해 세그먼트의 Z축 선형 위치를 이송할 수 있다(Fig. 5). 이 운동을 통해서 링타입 세그먼트는 폭 1.8 m까지 파지가 가능한 것으로 분석된다. 하지만, 나선형 세그먼트는 나선의 1회전 진행거리(pitch of the helix)만큼의 스트로크가 더 필요하기 때문에 이에 대한 스트로크 신장에 대한 개조가 필요할 것으로 예측된다.
2.2.4 회전운동 분석
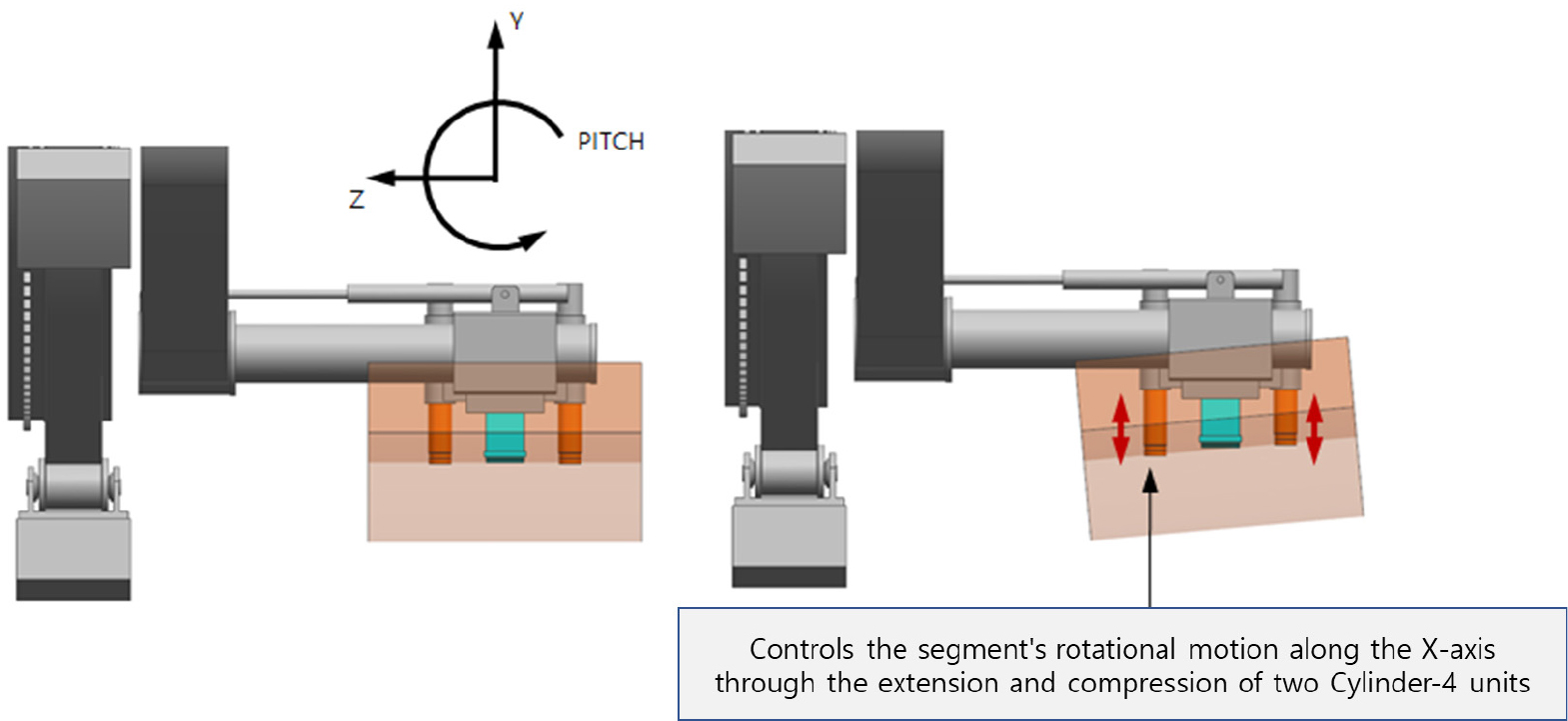
1) X축 회전운동(Pitch)
최대 230 mm의 스트로크를 갖는 Cylinder-3의 신장 및 수축을 통해 세그먼트의 장착 홀을 중심으로 약 5도의 X축 회전 운동이 가능하며, 이를 통해 세그먼트의 자세를 조정할 수 있다(Fig. 6).
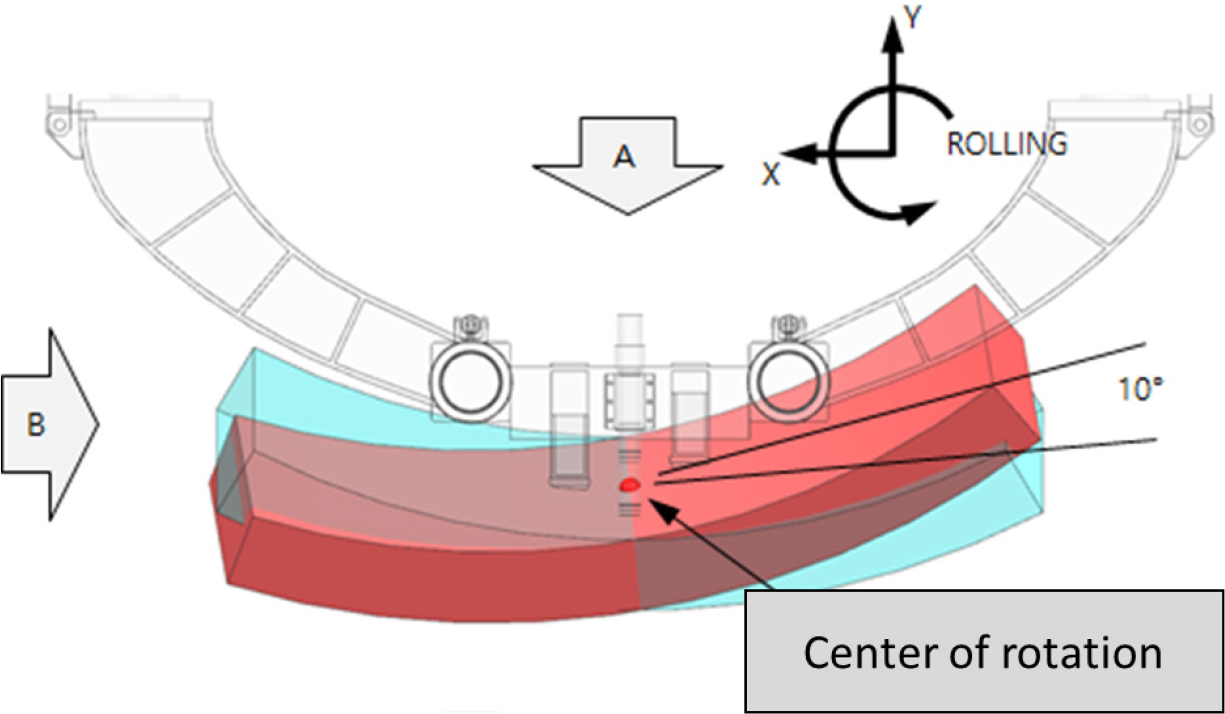
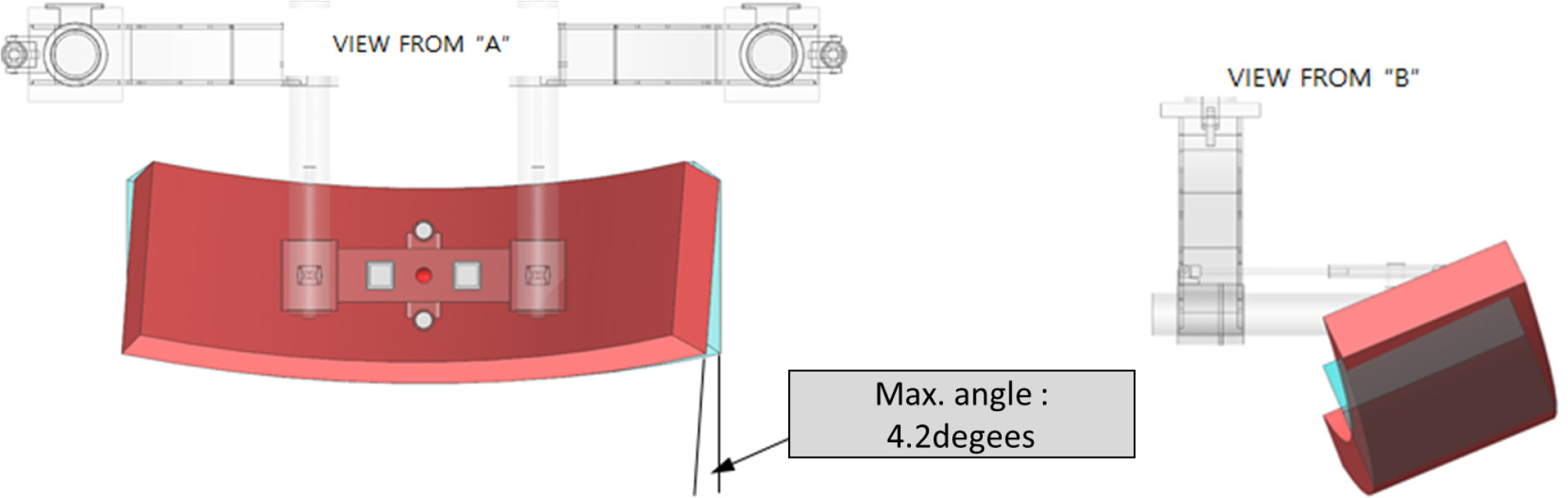
2) Y축 회전운동(Yaw)
Cylinder-3과 Cylinder-4의 복합 운동을 통해 Y축 회전운동을 수행할 수 있다. 세그먼트 장착 위치 상단을 기준으로, Cylinder-3의 신장 및 수축에 의해 발생하는 최대 회전 각도는 ±23도이며, Cylinder-4의 신장 및 수축에 의해 발생하는 최대 회전 각도는 ±10도이다. 초기 정지 상태에서 Cylinder-3과 Cylinder-4의 4차례의 복합적 운동을 통해 약 4.2도의 Y축 중심 회전 자유도(yawing)를 구현할 수는 있지만, 이는 너무 복잡한 작동방식으로 나선형 세그먼트의 회전각도를 조정하기에 다소 불편함이 따를 것으로 파악되었다(Fig. 7, Fig. 8).
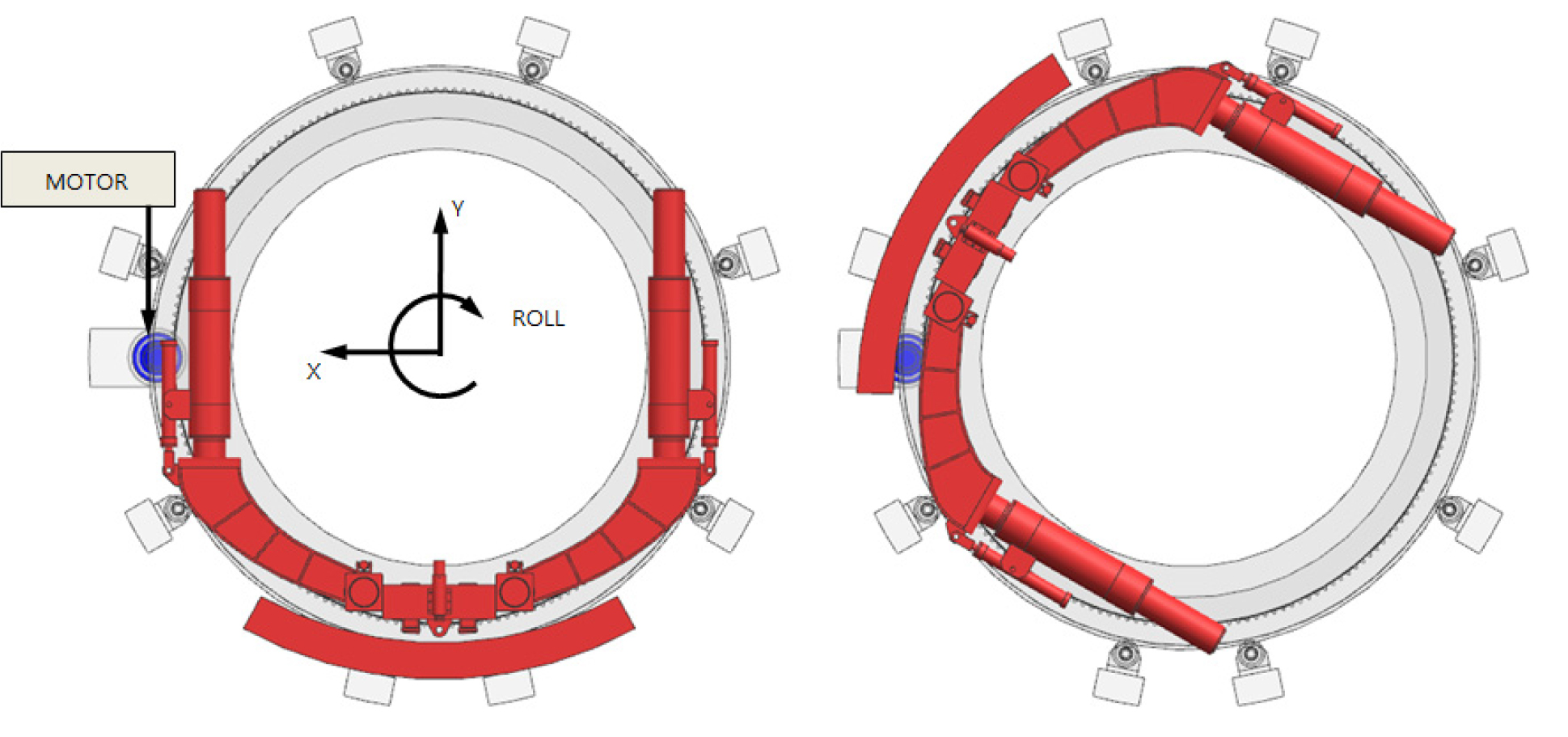
3) Z축 회전운동(Rolling)
Z축 회전운동은 두 개의 액추에이터(Actuator)를 통해 제어하여 세그먼트를 원하는 위치로 이송한다. Fig. 9와 같이 TBM 중심을 기준으로 360도의 Z축 회전 자유도를 가지며, 이는 모터(Motor)에 의해 구동된다. 이를 통해 세그먼트를 조립 위치로 이송한 후, 두 개의 Cylinder-4(최대 스트로크: 100 mm)가 각각 신장 및 수축하여 세그먼트를 이렉터 장착 홀을 기준으로 회전시켜 미세 위치 조정을 수행한다(Fig. 10).
3. 시뮬레이션 기반의 나선형 세그먼트 조립용 이렉터 시스템 개조
3.1 기존 TBM 시뮬레이션의 한계점
3D 모델링 기반의 CAD 프로그램을 활용한 나선형 세그먼트 조립 시뮬레이션에서는 Fig. 11과 같이 각 파트 간의 간섭이 인식되지 않는 한계가 있다. 이로 인해 실제 세그먼트 조립 과정에서 발생할 수 있는 파트와 세그먼트 간의 충돌 현상을 사전에 확인할 수 없는 문제가 존재한다. 따라서 연속 굴착 TBM 이렉터 시스템의 정확한 해석과 설계를 지원하기 위해서는 파트 간 충돌 인식, 페데스탈 경사면의 접촉, 체결 중 추진 잭의 가동 제어 등을 정밀하게 묘사할 수 있는 신규 시뮬레이션이 필요하다.

3.2 신규 시뮬레이션 개요
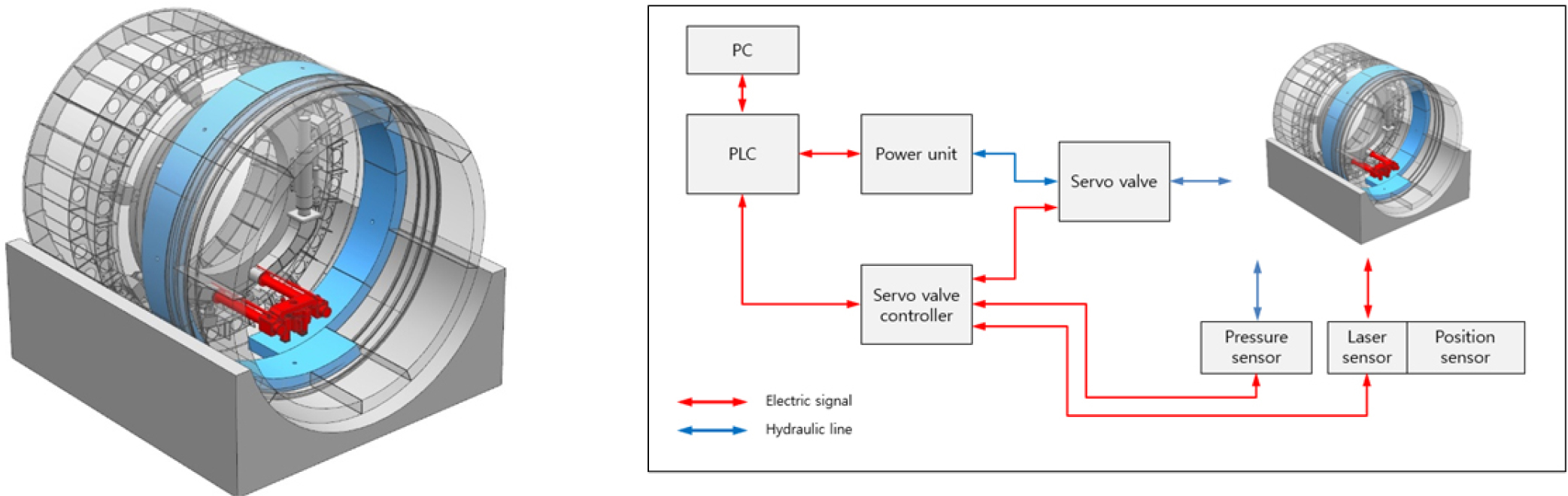
SolidWorks의 3D 모델링, API (Application Program Interface), 및 Motion 기능을 활용하여 파트 간 간섭 및 접촉 기능이 구현된 실규모 연속 굴착과 동일한 조건의 시뮬레이션 모델을 개발하였다. 시뮬레이션에서는 개조된 이렉터 시스템의 6자유도를 구성하는 유압 장치(실린더 및 모터)의 성능 데이터를 변수로 설정하고, 이에 따른 세그먼트 조립 결과의 변화를 모니터링하였다. Fig. 12는 TBM의 연속 굴착 이렉터 시스템을 시뮬레이션하기 위한 명령 체계의 개념을 설명한다. 기존의 매뉴얼 방식에서 벗어나기 위해 통합 명령 및 제어가 가능한 중앙 관제 시스템(PC)이 필요하며, 해당 시스템에서 모든 명령은 PLC를 통해 제어된다. PLC는 동력계와 모션 제어계로 구분되며, 이러한 명령들이 동시에 작동함으로써 세그먼트 체결과 동시에 이렉터의 모션이 구현된다. 여기서 적색은 전기신호의 전달 경로를, 청색은 유압 신호의 전달 경로를 의미한다.
3.3 이렉터 시스템의 개조
개조에 필요한 사항을 사전에 검토하기 위해 시뮬레이션 도구의 시각화(Visualize) 옵션을 활용하였다. 해당 기능은 세그먼트 운반 및 체결 과정에서 세그먼트와 사전 조립된 TBM 부품 간의 접촉 및 간섭을 확인하는 데 사용하였다. 분석 결과, 헬리컬 세그먼트의 접지 및 운반을 위해 이렉터의 Z축 방향 실린더 추가 신장이 필요하였으며, 나선형 경사각의 정밀한 끼워 맞춤 기능을 위해 Y축 회전 운동 제어용 모터를 추가해야 한다는 결론을 도출하였다.본 시뮬레이션에 활용된 각 엑추에이터의 세부 사양은 Table 3에 명시하였다.
Table 3.
Actuator specifications of the improved erector system
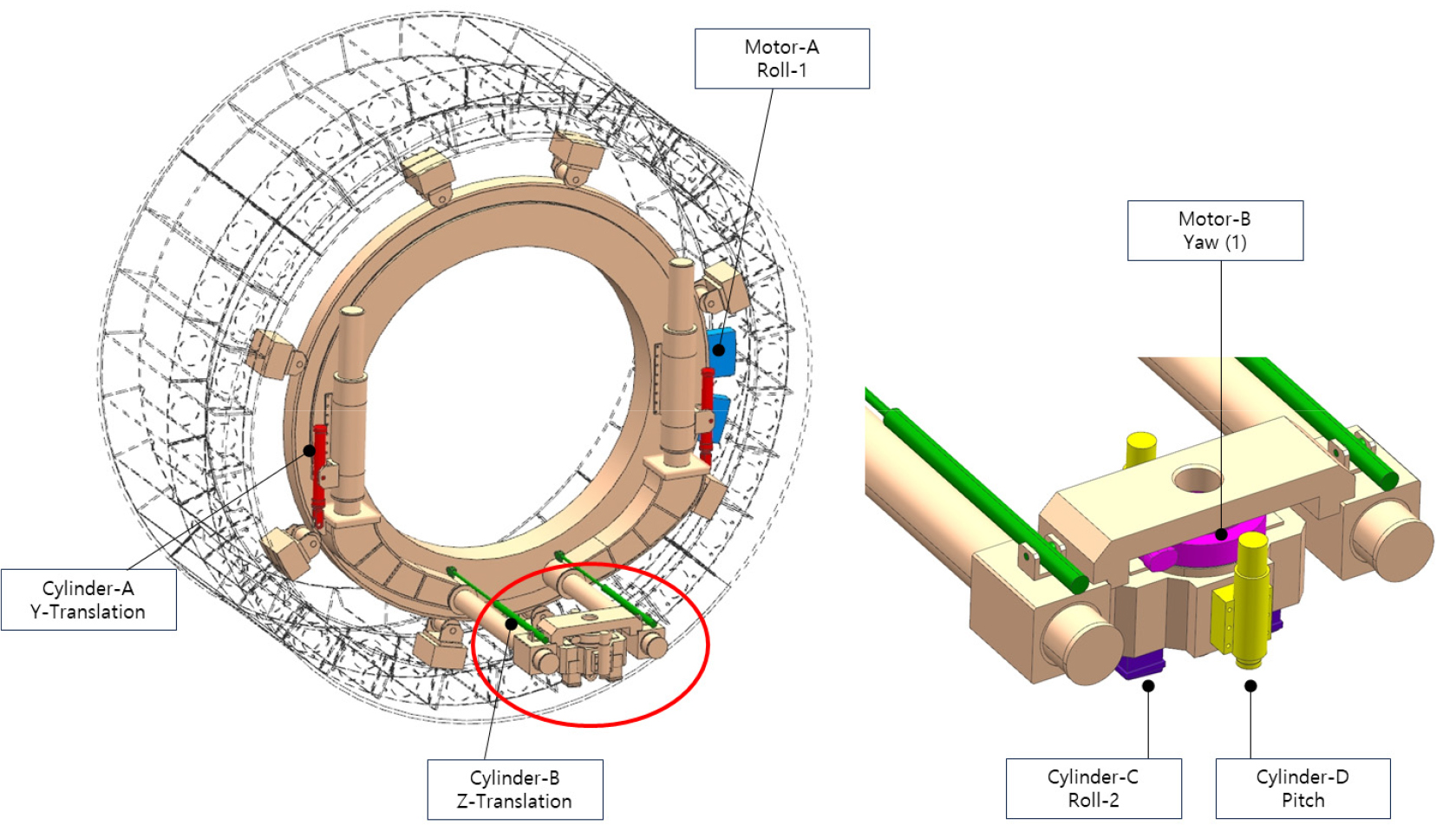
2장에서 분석한 것과 같이, 이렉터 좌표계 기준으로 Y축 중심 회전 (yawing) 자유도가 독립적이지 않고, 불완전하게 구현되는 현상을 재확인되었다. 따라서, Fig. 13과 같이 스윙 모터(Motor-B)를 추가하여 총 6개의 독립적인 자유도를 가지는 시스템으로 설계도를 수정하였다. 또한, 나선형 세그먼트의 나선 진행거리(pitch of helix)을 분석한 결과, Z축 선형 운동 범위를 400 mm 확대해야 하는 것으로 분석되었다. 그래서 Z축 방향 선형이동거리(Z-translation)를 관장하는 Cylinder-B의 스트로크를 기존 800 mm에서 1,200 mm로 변경하였다.
3.4 신규 시뮬레이션 개발
Fig. 14는 시뮬레이션 작업의 전체 흐름도를 나타낸다. 본 프로그래밍 작업은 크게 모델 생성/연계, 제어/모션, 해석/검증의 세 단계로 구분된다. 첫 번째 단계인 모델 생성에서는 각 유압 부품의 세부 사양과 성능(출력, 토크, 속도)을 정확하게 구현하기 위해 유압장치의 실제 성능 데이터를 각 부품 모델의 기본 사양으로 입력하였다. 해당 입력 사항에는 개조된 이렉터의 사양이 반영되었다. 이후, 해당 구동 정보를 CAD 작동과 연계하기 위한 상호 번역 도구인 API를 생성하였다. 두 번째 단계인 제어/모션은 CAD 프로그램 내에서 명령 제어를 위한 제어 옵션을 추가하였다. 마지막 단계인 해석/검증에서는 프로그램의 전산 해석을 수행하여 애니메이션을 생성하고, 사용자가 이렉터의 조립 과정을 검증할 수 있도록 하였다.
기존에 설계된 나선형 세그먼트는 7.5분할 크기이며, 8개를 조립하여 1개의 링이 완성되는 구조이다. 먼저, 대차에 저장된 세그먼트를 Z축 방향으로 이송시킨 후, 각 액추에이터를 제어하여 정밀하게 나선형 경사면에 맞춤 과정을 수행하였다. 이 과정을 총 15회 반복하여 2개의 링을 체결하는 시뮬레이션 시나리오를 수립하고 해석을 수행하였다. 세부 조립 순서는 먼저 세그먼트를 이렉터에 고정하고 Y축, Z축, Roll 선형 및 회전 이송을 통해 세그먼트 이송 후 각 회전 자유도를 통해 미세조정을 통한 정확한 위치에 세그먼트를 고정 시키는 순서로 자세한 절차는 Table 4에 명시하였다. 각 액추에이터의 유압 성능은 K사의 최대 성능의 50%로 설정하였다.
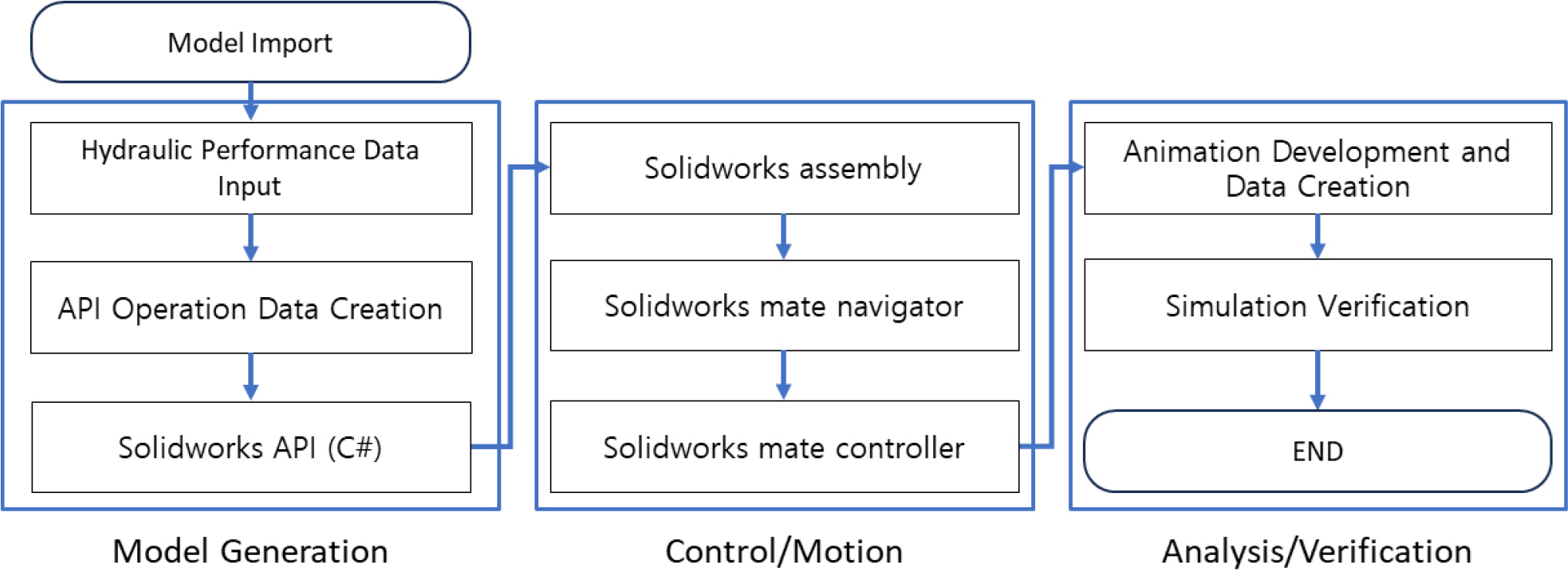
Table 4.
Segment assembly motion sequence
3.5 신규 시뮬레이션 결과
3.5.1 세그먼트 설치 속도
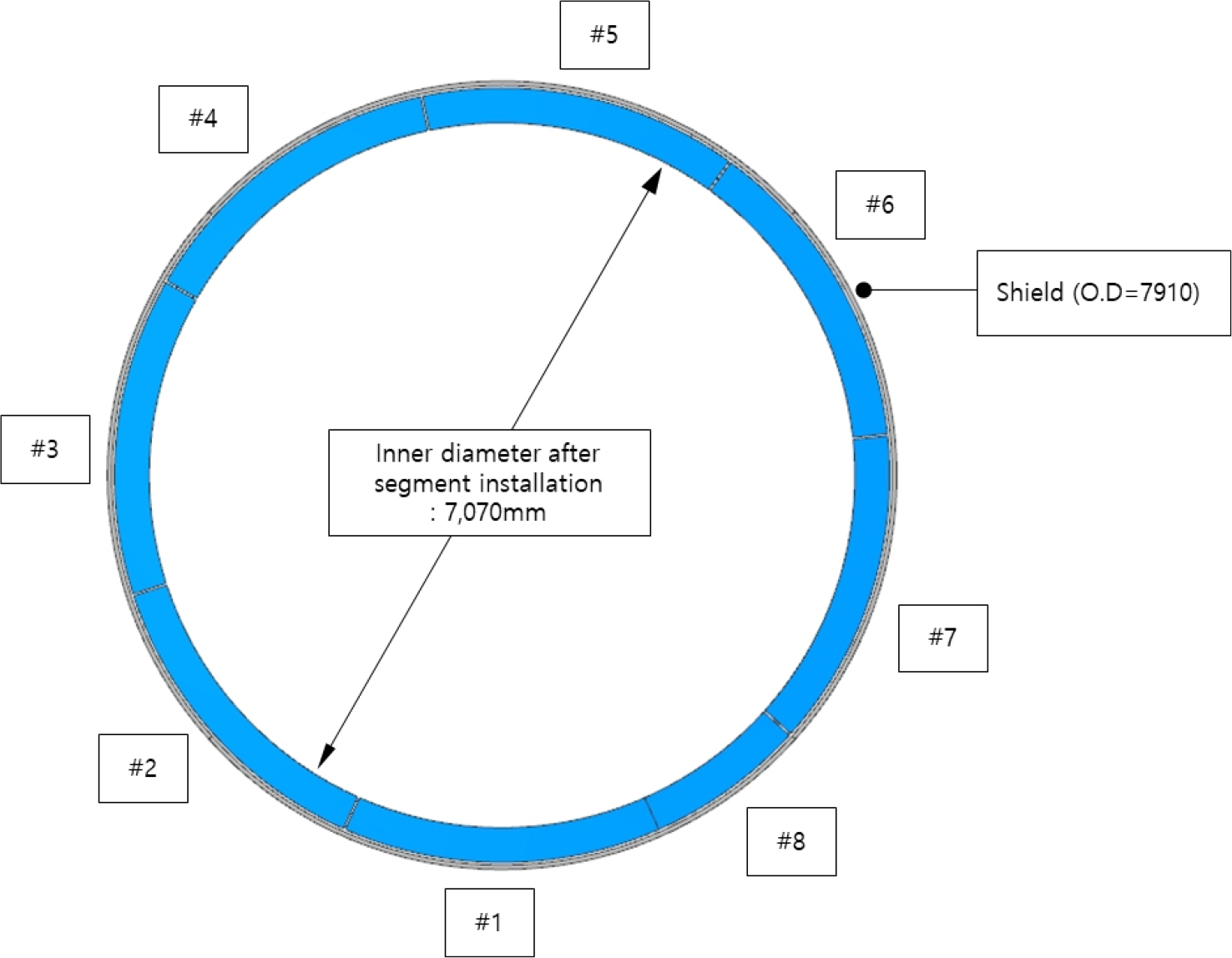
굴착시간이 고려되지 않은 세그먼트 설치만을 고려한 시뮬레이션의 순서는 Fig. 15에 표시된 세그먼트 번호 순서에 따라 진행하였으며, Fig. 16은 시뮬레이션 전후의 화면을 나타낸다. 링 상단에 위치하여 이송시간이 가장 많이 소요되는 5번 세그먼트의 조립 시간이 5.61분으로 가장 길었으며, 하단에 위치한 1번 세그먼트의 조립 시간이 4.68분으로 가장 짧았고, 좌우 대징 구조인 2, 3, 4번과 6, 7, 8번의 세그먼트 조립 시간은 거의 동일하게 나타났다. 총 16개의 세그먼트를 조립하는 데 소요된 시간은 82.3분으로 도출되었다.
3.5.2 세그먼트 설치 오차 분석
실제 제작된 세그먼트의 오차를 반영한 시뮬레이션을 수행하기 위해, 총 5건의 TBM 공법으로 진행된 터널 공사에서 조사된 세그먼트 제작 공차를 분석한 연구 결과(Cavalaro et al., 2012)를 바탕으로 각 세그먼트별 제작 공차 및 시공 오차를 적용하여 시뮬레이션을 수행하였다(Table 5, Fig. 17). 시뮬레이션 결과, 평균 1.38 mm, 최대 4 mm의 세그먼트 설치 오차가 발생하였다.
Table 5.
Manufacturing tolerance and installation error for each segment set in the simulation
4. 결 론
본 연구에서는 나선형 세그먼트를 조립하기 위해 이렉터의 자유도를 향상시키는 설계 개조안을 제안하였다. 개조된 이렉터 모델의 성능을 사실적으로 검증하기 위해 신규 시뮬레이션 프로그램을 개발하였다. 일련의 연구 과정을 요약하면 다음과 같다.
(1) 기존 이렉터 시스템의 자유도 및 각 액추에이터(Actuator)의 역할을 분석하였다. 분석 결과, 기존 이렉터 시스템은 5자유도를 가지는 것으로 확인되었으며, 이는 나선형 세그먼트 설치에 일부 한계가 있는 것으로 예측되었다.
(2) 나선형 세그먼트 조립을 위해 필요한 6자유도를 갖춘 이렉터 설계 개조안을 작성하고 이를 3차원 모델로 구현하였다.
(3) 각 부품 간 접촉 및 간섭을 반영한 시뮬레이션 프로그램을 개발하였다. 이를 이용하여 2개 링을 조립하는 시뮬레이션을 수행하였다.
(4) 시뮬레이션 결과, 개조된 이렉터는 나선형 세그먼트를 체결하는 데 충분한 운동학적 기능을 보유한 것으로 확인되었다. 또한, 실제 유압장치의 성능을 입력함으로써 세그먼트의 조립 시간과 시공 오차 등 실제 현장과 유사한 데이터를 획득할 수 있었다.
