

1. 서 론
2. Open TBM과 Shield TBM의 차이
2.1 장비 선정 조건
2.2 굴진방식
3. Open TBM 방향제어 모델
3.1 수평방향 제어
3.2 수직방향 제어
3.3 전진방향 제어
4. Open TBM 방향제어
4.1 Open TBM 시뮬레이터
4.2 Open TBM 시뮬레이터의 방향제어
5. 결 론
1. 서 론
Open TBM (Tunnel Boring Machine)공법은 양호한 암반지반에서 주로 사용하는 기계굴착장비로서 굴진면 자립이 어려워서 그리퍼 반력을 얻기 어려운 지반에는 적합하지 않은 것으로 알려져 있다. 국내에서 이 공법은 수로터널의 굴착에 주로 이용되었으며, 도로 및 지하철 터널에서도 사용되었다. 최근 수도권광역급행철도(GTX)에도 적용된 바 있다(Lee, 2025).
터널 굴착을 위해 구성된 기계부품의 모음이라고 할 수 있는 TBM은 본체 외에 백업(back-up)설비를 포함하면 수십에서 수백미터 길이의 대형 굴착장비이다. TBM 터널 역시 다른 터널 굴착방법과 마찬가지로 굴진면의 안정 및 상부 지반침하를 최소화하는 것이 중요하다. 잘 훈련된 TBM 숙련 운전자는 터널의 안정성을 잘 유지하면서 굴착을 수행한다. 그러나 2014년 건설산업연구원의 설문조사에서 노사 모두 현재 숙련인력이 부족하고 계속적으로 부족현상이 심해질 것으로 응답하였다(Shim, 2015). 이러한 설문결과는 비숙련 운전자 또는 중간단계 운전자의 숙련도를 향상시키기 위한 교육 및 훈련이 필요함을 나타낸다.
항공기, 자동차, 철도분야 등에서는 운전 훈련을 위해 시뮬레이터 사용하는 것이 일반화되었다. TBM분야에서도 이렉터 시뮬레이터를 비롯하여 운전 시뮬레이터의 개발이 각국에서 이루어지고 있다(Chorley, 2017, Herrenknecht, 2018, Jardόn et al., 2012). 특히 프랑스 Bouygues Travaux Public은 이론을 포함하여 시뮬레이터(THALIA)를 이용한 실습에 이르기까지 TBM 운전자의 훈련과 교육을 위한 커리큘럼을 탄탄하게 구성한 사례다(Bouygues Construction, 2017). ITA-CET위원회는 전문가에 의해 교육되는 이론 교육, E-learning, 시뮬레이터를 활용한 실습, 그리고 현장경험을 망라하는 TBM 운전자인증제도(TBM driver certification scheme)를 준비하고 있다. 이 제도는 신규 운전자를 포함하여 숙련 운전자까지 교육대상을 넓은 범위로 잡고 있으며, 궁극적으로 TBM으로 이루어지는 작업 전반의 품질과 안전을 향상시키려는 목적을 가진다(ITA, 2019).
장비 시뮬레이터는 일반적으로 훈련을 받는 운전자가 시뮬레이터 운전석에서 어떤 입력을 수행했을 때 장비특성과 주변 환경요인을 고려하여 입력에 대한 반응을 운전자에게 보여준다. 보통 디지털 방식, 모니터의 그래픽 형태로 보여지는 시뮬레이터의 특성을 고려할 때, 버튼을 누르거나 레버를 당기는 등의 입력에 대한 반응은 수식화를 통해 이루어지게 된다. 간단한 예로서, 커터헤드 회전속도 제어를 위한 1~10까지의 다이얼이 있고 이를 이용한 입력을 3으로 한다면 커터헤드 회전을 위한 전기모터의 최대 출력과 다이얼 값과의 관계 수식으로부터 입력 3에 해당하는 출력을 반응하도록 구성하고 그 출력에 연동되는 다른 값도 계산하게 된다.
국내에서도 TBM 터널의 증가에 따라 운전전문인력의 수요가 늘어나면서 전문인력 양성의 필요성이 증대되고 있다. 세계적인 개발추세에 맞추어 기존의 도제식 교육방식이 아닌 TBM 작업시나리오와 시나리오가 포함된 시뮬레이터에 기반한 교육·훈련이 필요한 상황이다. 본 연구에서는 메인빔 타입(main beam type) Open TBM을 대상으로 Open TBM의 시뮬레이터 구성에 필요한 방향제어 응답방법에 대한 모델 연구를 수행하였다.
2. Open TBM과 Shield TBM의 차이
2.1 장비 선정 조건
기계화 시공장비인 TBM은 다양한 공법이 존재하며, 기술력, 현장조건, 경제성 등의 다양한 요소를 고려하여 공법을 선정한다. AFTES(2000)는 기계화 굴착장비 선정에 영향을 미치는 요소를 다음과 같이 6개로 구분하였다.
① 지반의 이방성과 같은 자연적 제약(natural constraints),
② 암반경도 및 클로깅(clogging) 가능성을 표현하는 물리적 요소(physical parameters),
③ 강도와 응력 및 변형으로 대표되는 역학적 요소(mechanical parameters),
④ 수압 및 지하수 유입가능성을 평가하는 수리지질학적 요소(hydrogeological parameters),
⑤ 마모와 같은 기타요소(others),
⑥ 선형과 시공제약요소를 나타내는 현장특성(project characteristic).
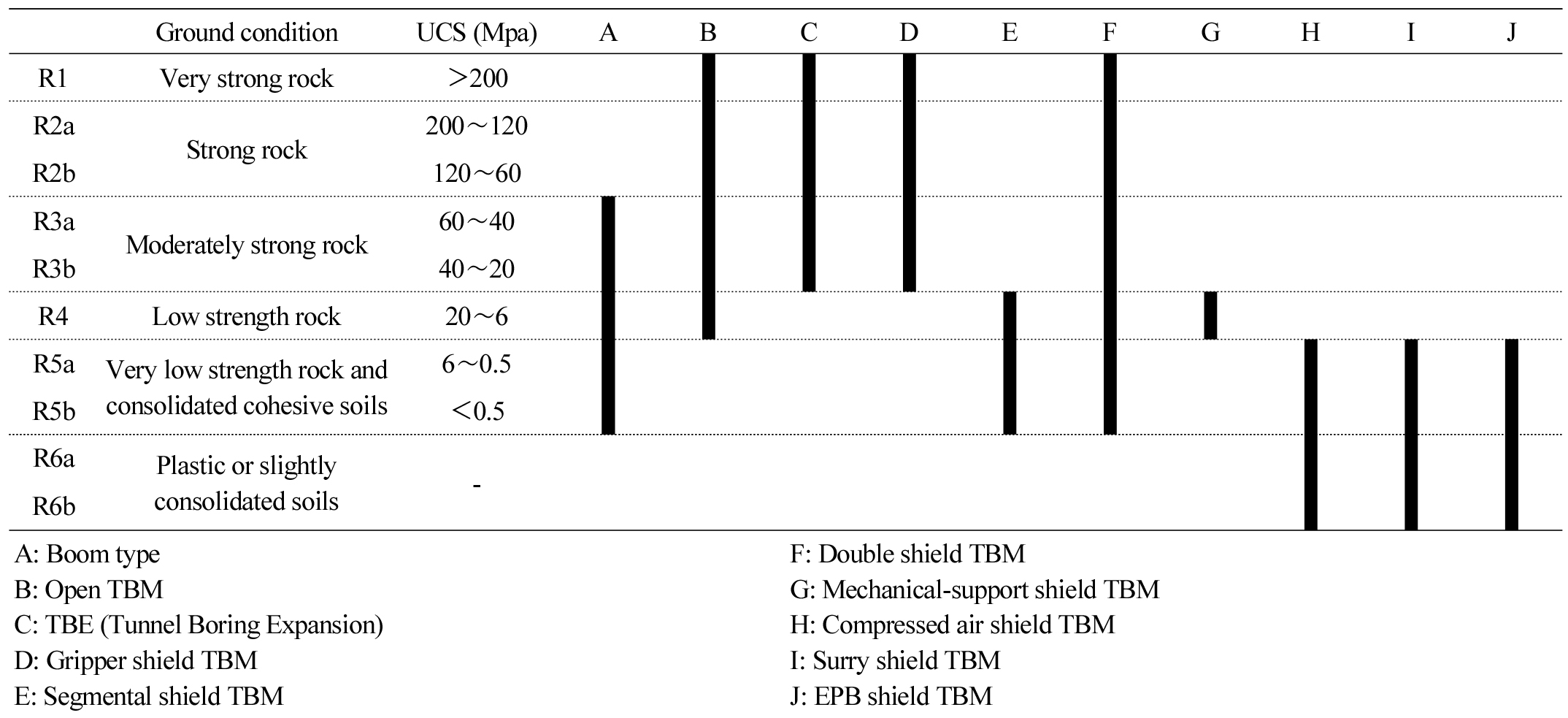
이와 같은 각 요소에 대한 평가는 기계화 시공장비의 선정에 사용될 수 있다. 더불어 AFTES(2000)는 지반조건별로 적용 가능한 기계화시공장비를 Table 1과 같이 제시하였다. 지반조건을 대표하는 물성(property)으로 일축압축강도(Uniaxial Compressive Strength, UCS)를 설정하고 강도에 따라 10등급으로 분류하여 사용가능한 굴착장비를 표시하였다.
2.2 굴진방식
Open TBM은 1985년 수로터널에 처음 적용되었고, 주로 터널의 길이가 긴 수로터널에 활용되는 특성상 Shield TBM보다 시공연장은 더 길다. 해외의 경우, 일본은 Shield TBM이 기계화 시공실적의 75%인 반면, 유럽과 미국에서는 Open TBM을 더 많이 시공(약 60%)하였다(KTA, 2008). KTA(2008)에서는 국가별 사용장비 실적의 차이가 해당 국가의 지반조건의 차이와 TBM 적용에 대한인식 차이에 의한 것으로 설명하였다.
Shield TBM과 Open TBM의 기계부품 구성은 TBM의 굴진방식에 따라 상이하다. Shield TBM은 Fig. 1a와 같이 지보재인 세그먼트(segments)를 쉴드잭(shield jacks)이 지지하여 추진력을 얻는 반면, Open TBM은 그리퍼 슈(gripper shoe)가 터널의 벽면을 지지하여 추진력을 얻는다(Fig. 1b). 이와 같은 이유로 Open TBM은 추진력을 얻기 어려운 지반에서는 사용이 어렵다.
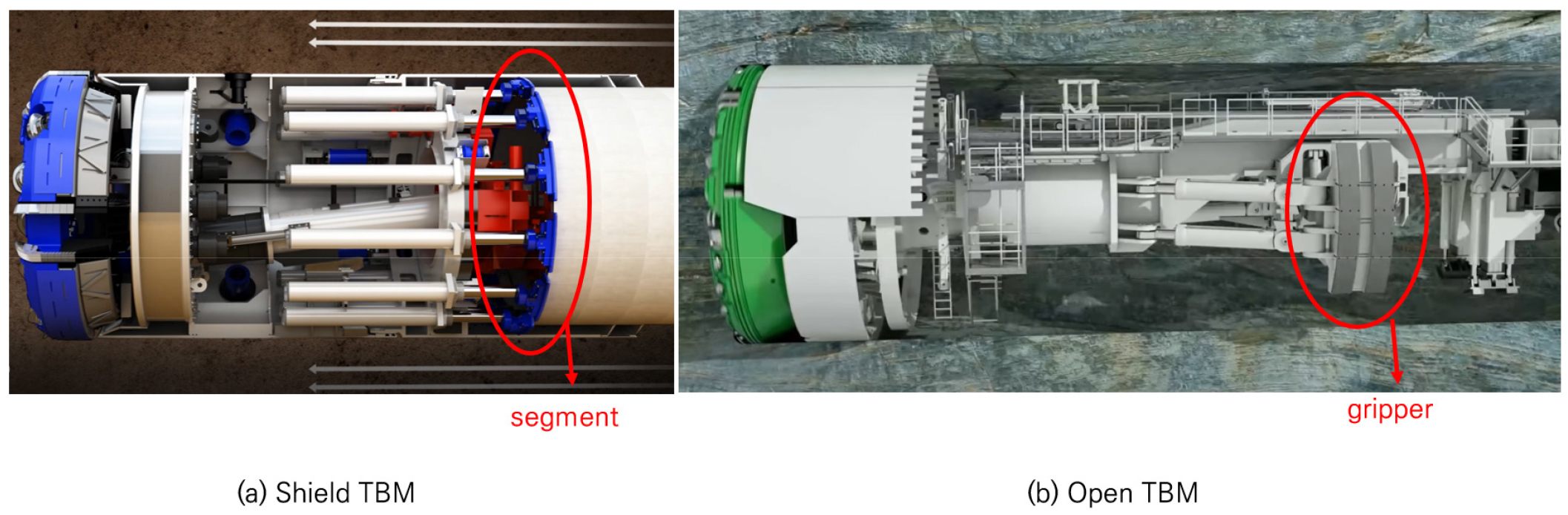
Fig. 1.
Difference between shield and open TBM support method ((a) EMKorea, 2017, (b) Herrenknecht, 2015)
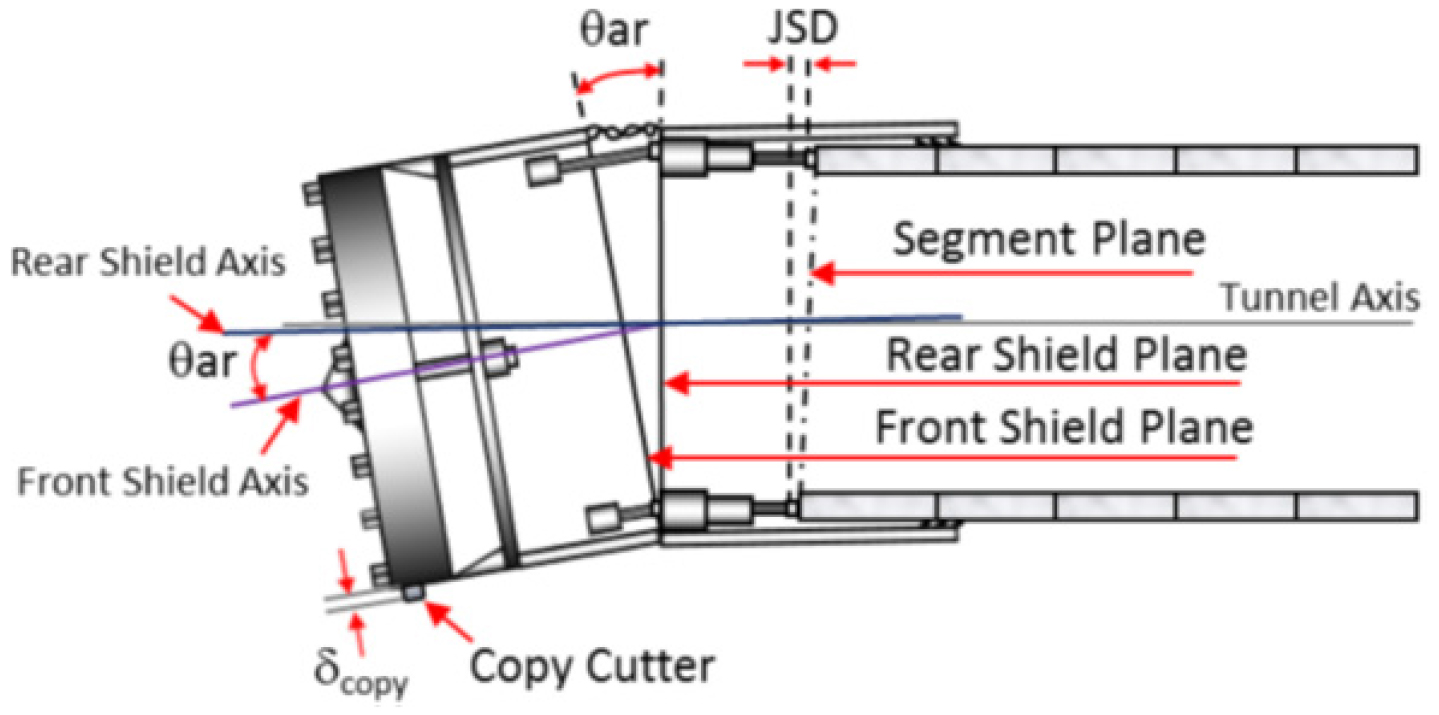
Shield TBM은 쉴드잭 또는 중절잭(articulation jacks)을 이용하여 방향을 제어할 수 있다. 중절잭을 이용한 방향제어는 Fig. 2에서와 같이 전통부(front shield)와 후통부(rear shield)의 연결부인 중절부(articulation)에 설치된 중절잭의 길이변화에 따라 나타나는 중절각(articulation angle, θar)에 의해 수행된다. 여기서 중절각은 전통부와 후통부의 축이 이루는 각도와 같다. 중절각만큼 꺾어진 전통부에 의해 굴진이 이루어지면서 Shield TBM의 방향이 변경된다.
Open TBM은 그리퍼 슈가 Shield TBM의 세그먼트 역할을 하여 굴진이 이루어진다. Open TBM의 그리퍼부(gripper assembly)는 Fig. 3과 같으며, 터널 벽면을 지지하는 그리퍼 슈, 그리퍼 실린더(gripper cylinders), 토크 실린더(torque cylinders)로 구성되어 있다. 그리퍼 실린더와 토크 실린더가 조립되어 있는 그리퍼 캐리어(gripper carrier)는 메인 빔(main beam)을 포함하고 있고 메인 빔을 통해 Open TBM 전면의 커터헤드(cutterhead)와 연결된다.
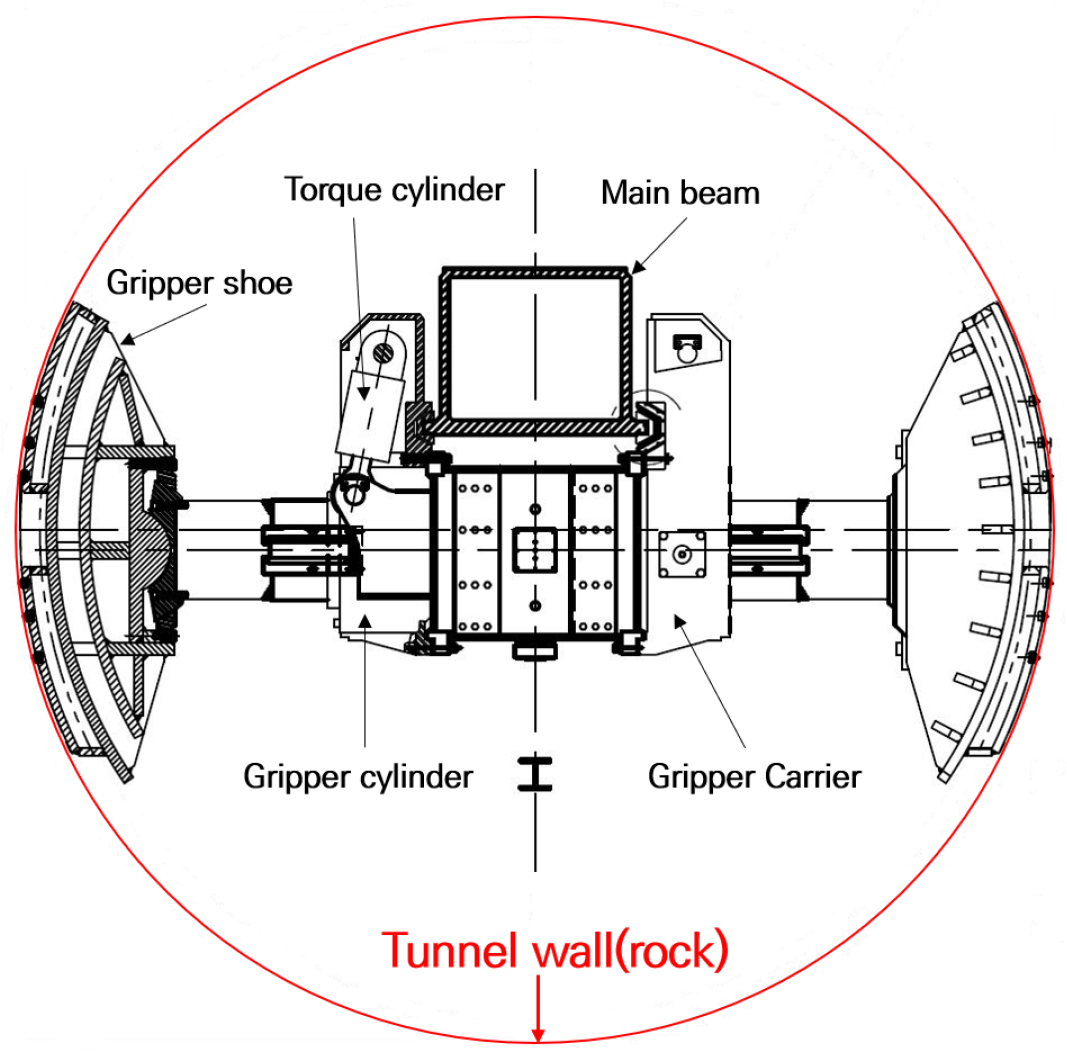
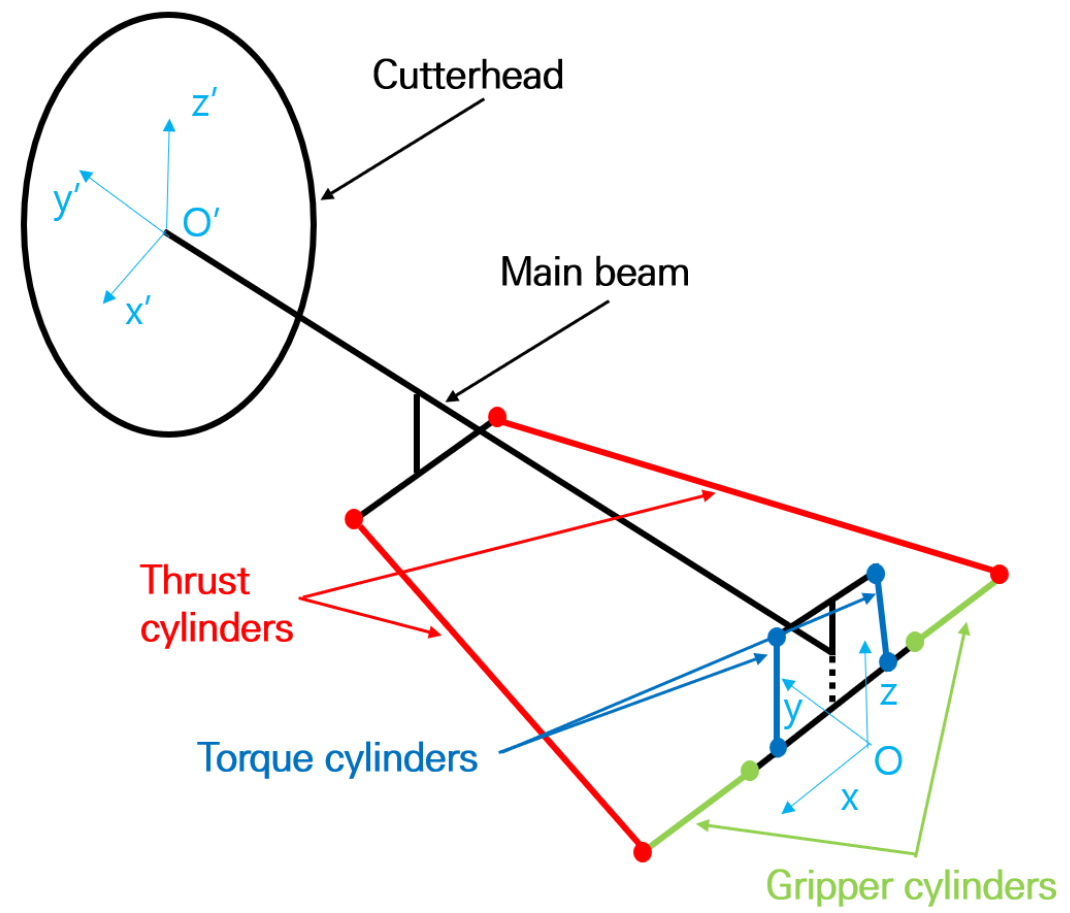
Fig. 4는 Open TBM 주요부의 구조를 보여준다. 앞서 설명한 바와 같이 Open TBM 전면의 커터헤드는 메인빔을 통해 방향제어가 가능한 그리퍼부와 연결된다. 그리퍼부는 그리퍼 슈로 암반면을 지지한 상태에서 그리퍼 실린더를 이용하여 좌, 우측 방향을 제어하고, 토크 실린더를 사용하여 상, 하 방향을 제어한다. 그리퍼부의 실린더들을 이용하여 굴진방향(각도)을 설정완료하면 Fig. 4의 추력 실린더(thrust cylinders)를 사용하여 굴진이 이루어진다.
3. Open TBM 방향제어 모델
2절에서 설명한 Open TBM의 방향제어에 대한 설명과 같이 Open TBM의 수평방향(x-direction) 제어는 메인 빔 양쪽의 그리퍼 실린더로 이루어지고, 수직방향(z-direction)은 토크 실린더, 전진방향(y-direction)은 추력 실린더를 이용하여 제어한다. 본 절에서는 각 실린더들에 의해 메인빔 타입 Open TBM의 커터헤드를 3방향으로 제어하는 모델을 구성하였다.
3.1 수평방향 제어
Open TBM의 방향제어를 위해서는 기본적으로 굴착을 수행하는 커터헤드의 회전각을 계산하는 것이 필요하다. Fig. 5는 수평방향 제어를 위한 커터헤드 좌‧우방향 회전각 계산에 대한 모식도이다. Open TBM의 커터헤드는 메인 빔을 통해 그리퍼 캐리어까지 연결되어 있다. 따라서 그리퍼 캐리어의 그리퍼 실린더를 연장(Extraction), 수축(Retraction)하게 되면 메인 빔 선단에 연결되어 있는 커터헤드의 방향각이 바뀌게 된다. 이 커터헤드 방향각(θx)은 Open TBM의 굴진에 따른 수평방향 이동량 계산에 활용될 수 있다.
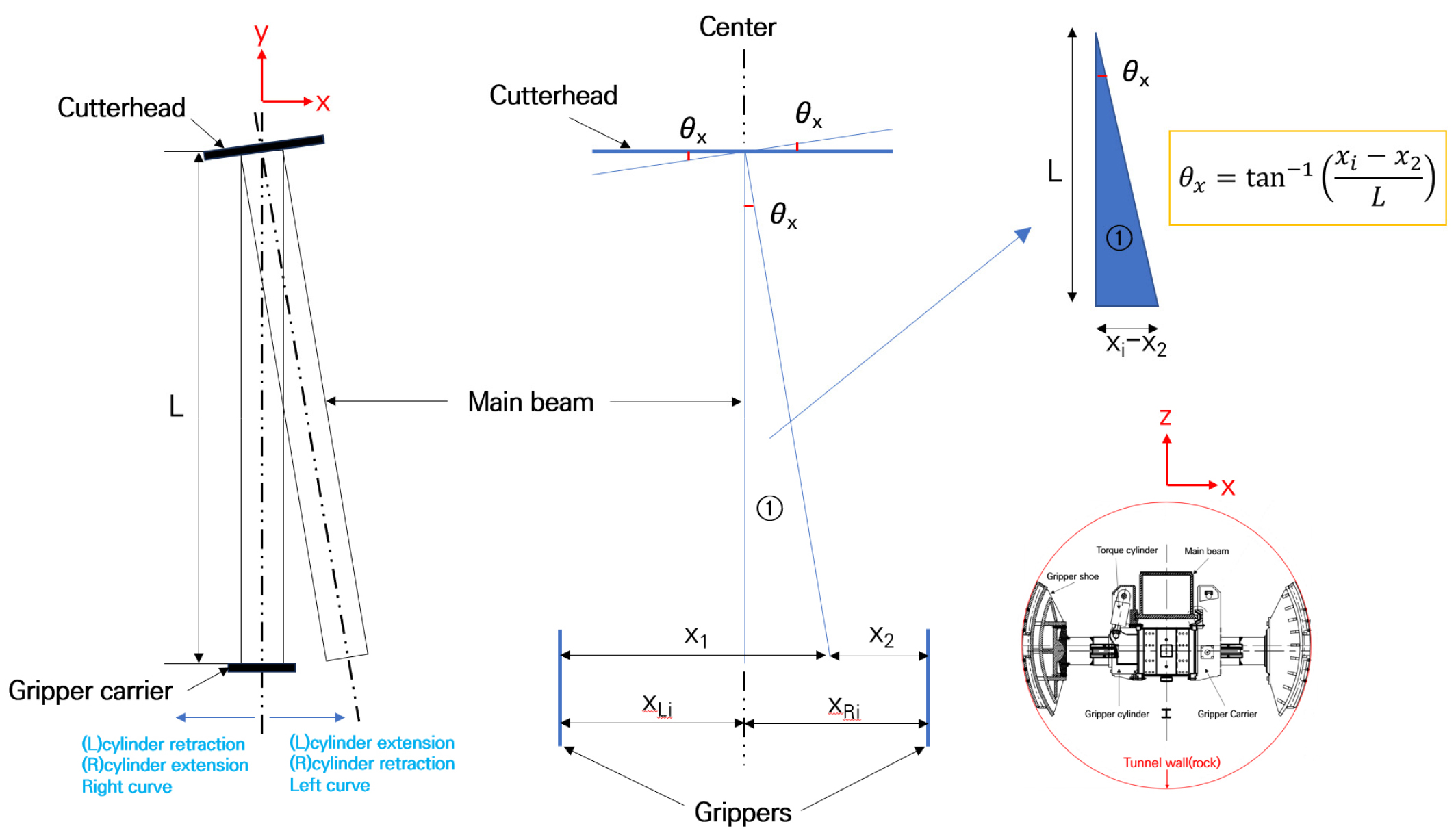
메인 빔 좌우측 이동에 따른 커터헤드 방향각은 커터헤드와 그리퍼 캐리어 사이의 거리인 메인 빔의 길이와 그리퍼 실린더에 의한 센터에서의 좌우측 이동거리를 바탕으로 삼각함수를 이용하여 식 (1)과 같이 계산한다. 이때 계산을 위해 도형 ①은 삼각형으로 가정하고, xLi, xRi, x1, x2는 그리퍼 실린더의 스트로크 길이, xLi, xRi는 좌, 우측 그리퍼 실린더의 최대 스트로크 길이, x2는 그리퍼 실린더 중 짧은 스트로크 길이, θx는 그리퍼 실린더의 스트로크에 의한 커터헤드의 회전각, L은 그리퍼와 커터헤드 사이의 거리(메인 빔의 길이)로 설정하였다.
3.2 수직방향 제어
마찬가지로 방향제어를 위해서 커터헤드의 상‧하방향 회전각을 계산하는 것이 필요하다. Fig. 6은 수직방향 제어를 위한 커터헤드 회전각 계산에 대한 모식도이다. 수평방향 제어와 같이 그리퍼 캐리어의 수직방향으로 설치되어 있는 토크실린더를 연장, 수축하게 되면 메인 빔 선단에 연결되어 있는 커터헤드의 방향각이 상‧하방향으로 바뀌게 된다. 이 커터헤드 방향각(θz)은 Open TBM의 굴진에 따른 수직방향 이동량 계산에 활용될 수 있다.
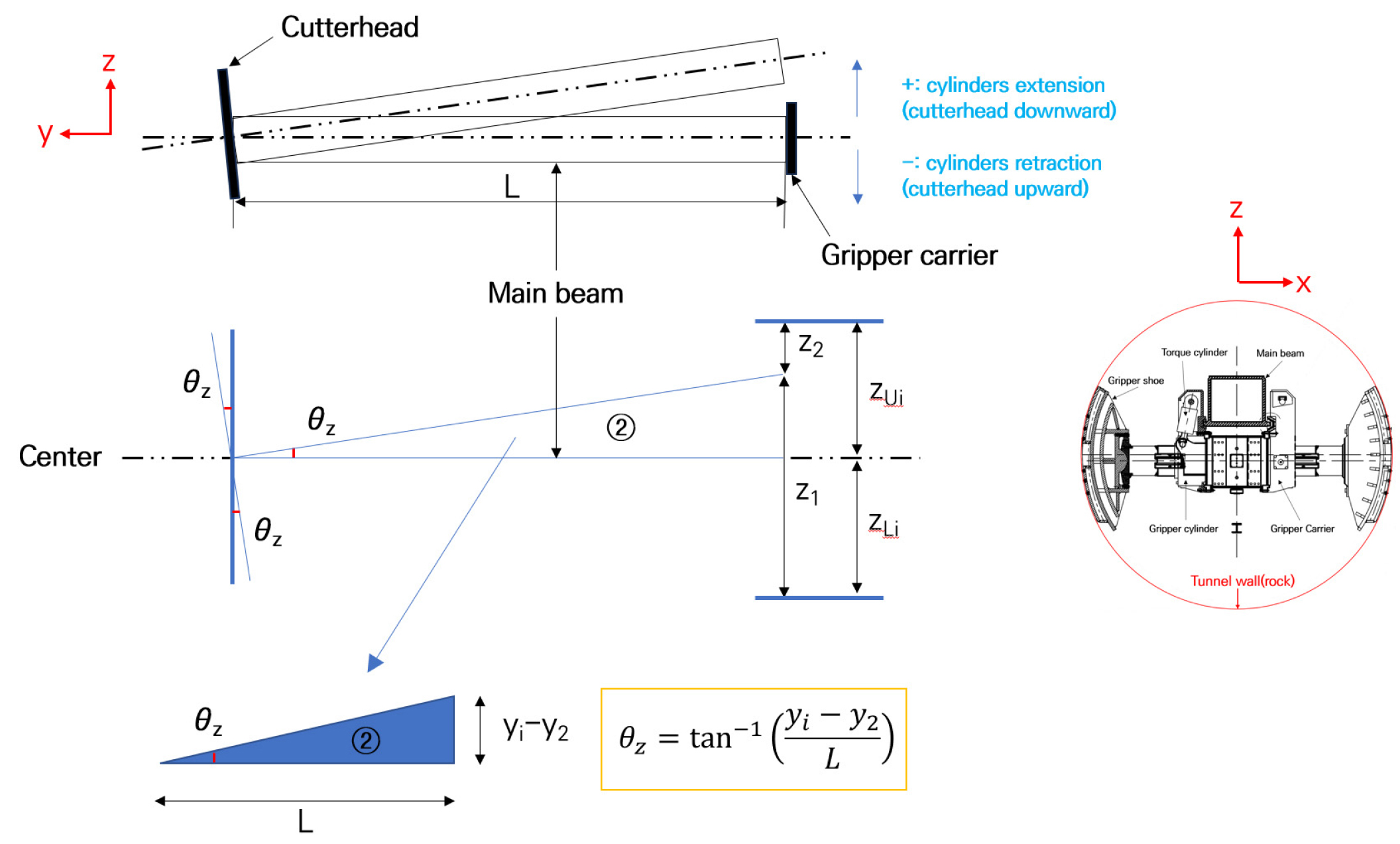
메인 빔 상‧하 이동에 따른 커터헤드 방향각은 커터헤드와 그리퍼 캐리어 사이의 거리인 메인 빔의 길이와 토크 실린더에 의한 센터에서의 상하측 이동거리를 바탕으로 삼각함수를 이용하여 식 (2)와 같이 계산한다. 이때 계산을 위해 도형 ②는 삼각형으로 가정하고, z1, z2는 토크 실린더의 스트로크 길이, zUi, zLi는 상, 하측 토크 실린더의 최대 스트로크 길이, z2는 토크 실린더 중 짧은 스트로크 길이, θz는 토크 실린더의 스트로크에 의한 커터헤드의 회전각, L은 그리퍼와 커터헤드 사이의 거리(메인 빔의 길이)로 설정하였다.
3.3 전진방향 제어
Open TBM의 전진은 메인빔의 양옆에 연결된 추력실린더의 연장, 수축에 의해 수행된다. 추력실린더는 굴착터널 중심부에 위치하는 메인빔과 터널 벽면에 고정되는 그리퍼에 연결되어 있기 때문에 경사방향으로 설치되어 있다(Fig. 7).
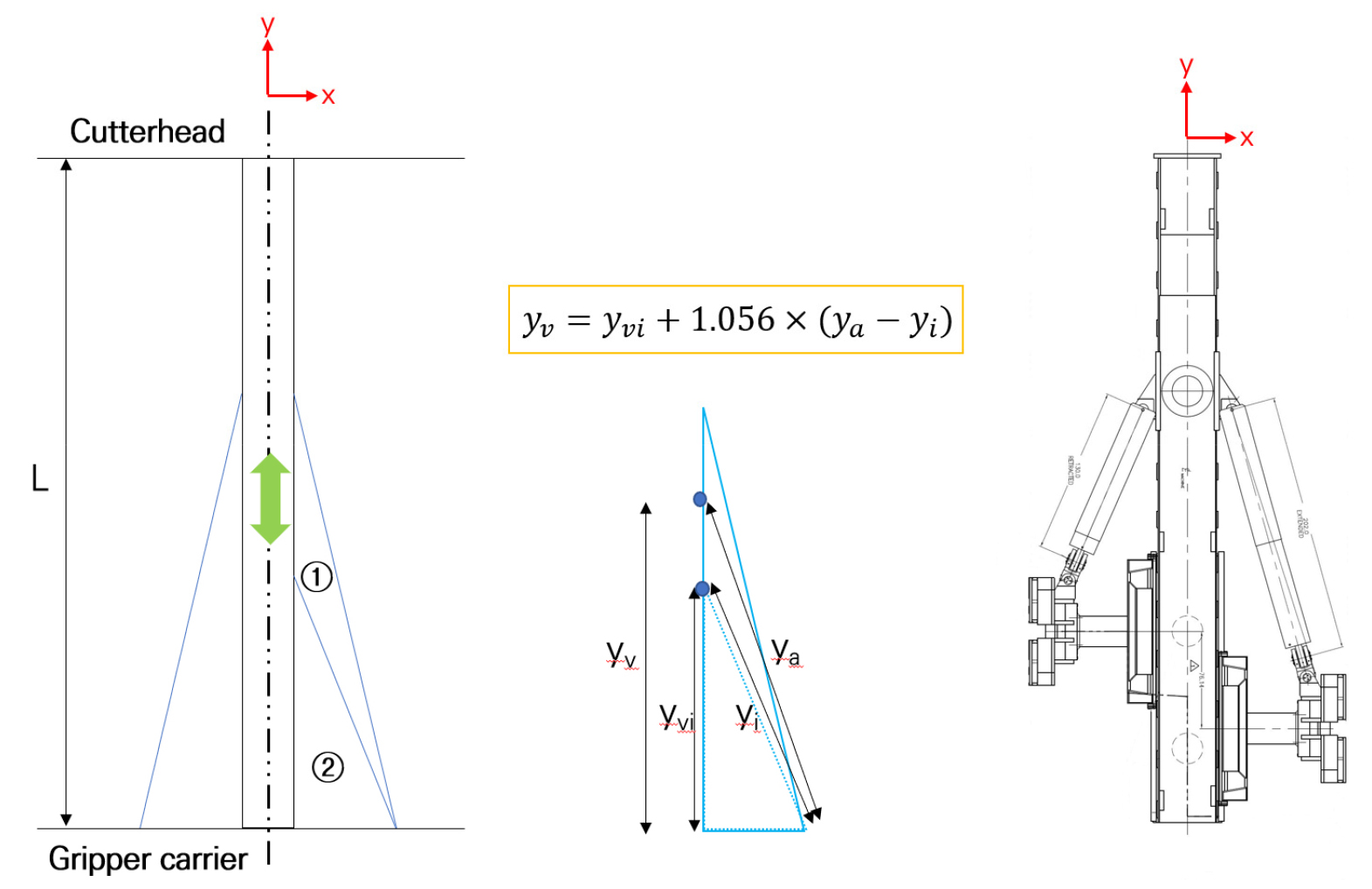
경사실린더의 양 끝단은 메인빔과 그리퍼에 힌지로 연결되어 그리퍼를 지지한 상태로 경사실린더를 연장 및 수축하면 메인빔이 앞으로 이동, 즉 Open TBM이 이동할 수 있게 되어 있다. 즉, 그리퍼부에서 토크실린더를 이용하여 메인 빔을 상하좌우로 이동하면 그에 따라 커터헤드의 각도가 터널을 굴진해야하는 방향으로 설정된다. 그리고 상하좌우 방향의 설정이 완료된 상태에서 추력실린더를 연장하면 추력실린더가 그리퍼 슈를 지지하여 메인 빔을 추진하고 오픈TBM이 전진하게 된다.
Open TBM의 전진방향 제어를 위해서는 추력실린더의 연장 및 수축에 따른 메인 빔의 이동거리를 계산할 필요가 있다. 메인 빔의 이동거리는 Fig. 7에서 yv이며 식 (3)과 같이 계산할 수 있다. 이때 경사진 추력실린더와 메인빔, 그리퍼슈로 이루어지는 형상(Fig. 7의 ①, ②)은 삼각형으로 가정한다.
여기서, yvi는 추력실린더가 최대 수축된 상태에서 그리퍼부 센터에서 메인 빔 상의 추력실린더 연결위치까지의 거리, yv는 yvi와 추력실린더의 확장에 의해 메인 빔이 이동한 거리의 합, yi는 추력실린더가 최대 수축된 상태에서 그리퍼 슈에서 메인 빔 상의 추력실린더 연결위치까지의 거리, ya는 추력실린더가 확장된 상태에서 그리퍼 슈에서 메인 빔 상의 추력실린더 연결위치까지의 거리이다. 식 (3)의 계수는 메인 빔과 그리퍼 사이의 거리, 추력실린더의 길이와 확장길이에 따라 달라질 수 있다. 본 연구에서는 직경 6.3 m Open TBM을 대상으로 계수를 산정하였다. 따라서 더 정확한 계수산정을 위해서는 사용하고자 하는 장비에 대해 위에서 언급된 해당길이를 적용하고 삼각형의 비례관계를 이용하여 계산할 수 있다.
4. Open TBM 방향제어
4.1 Open TBM 시뮬레이터
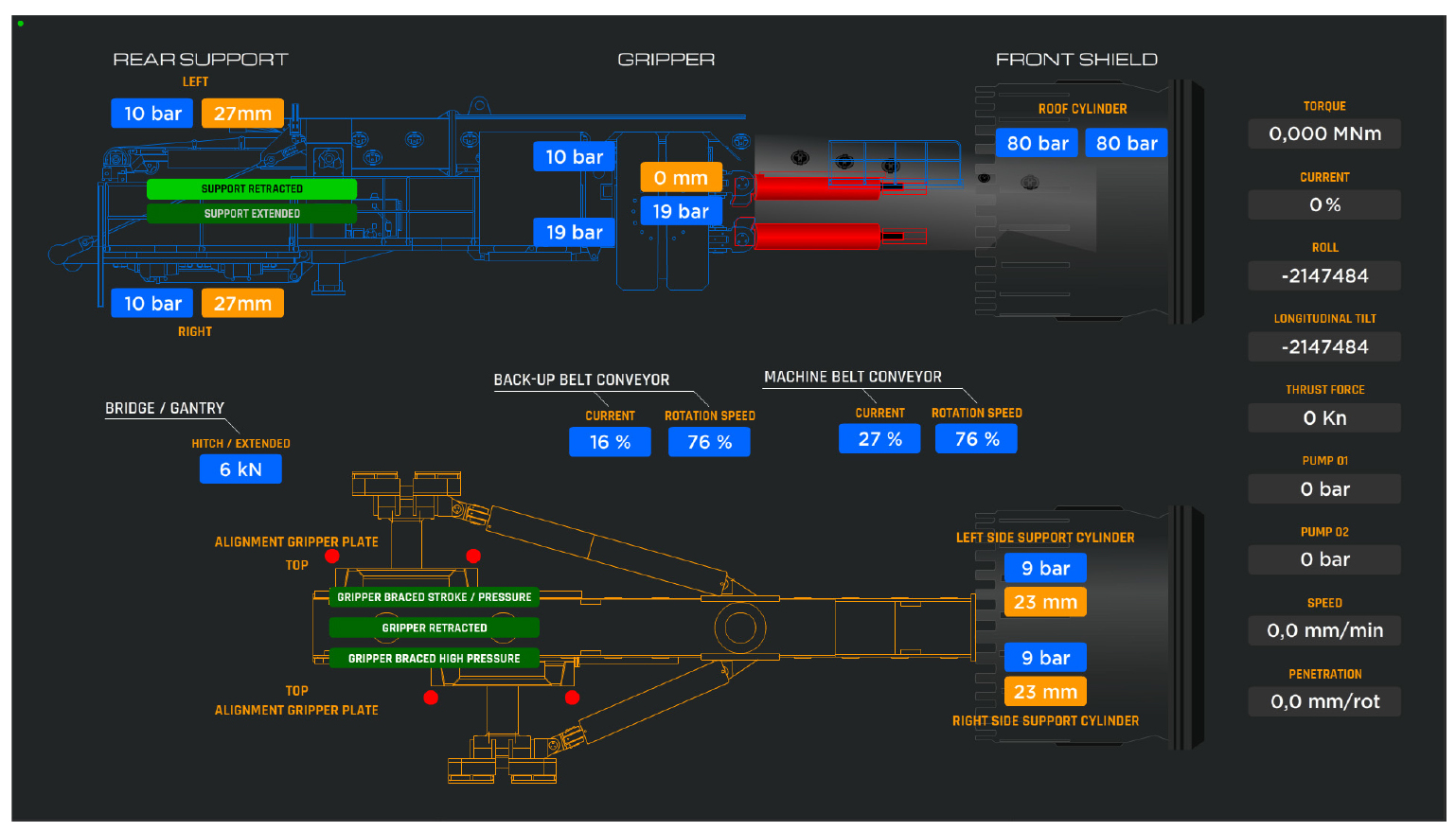
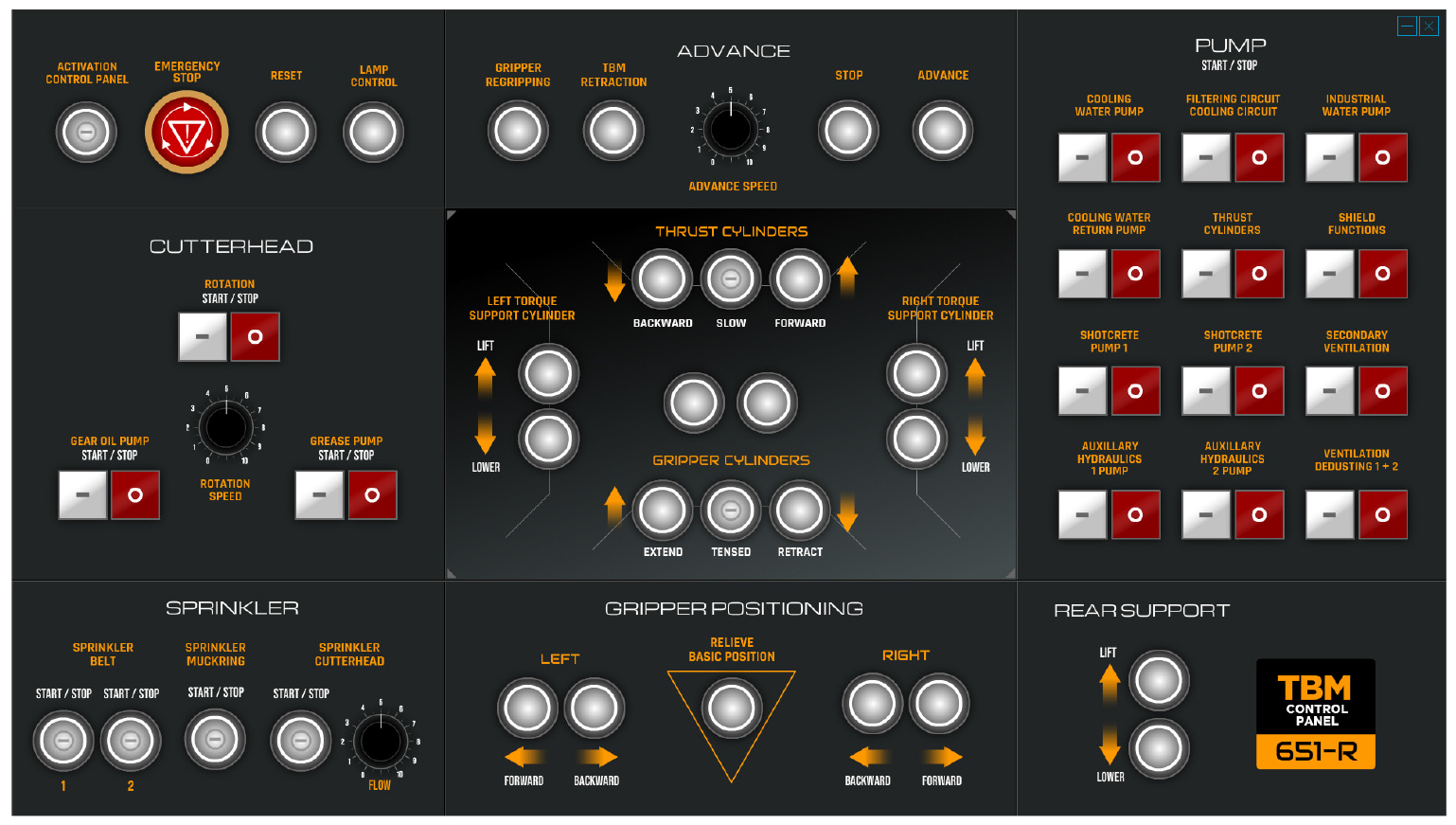
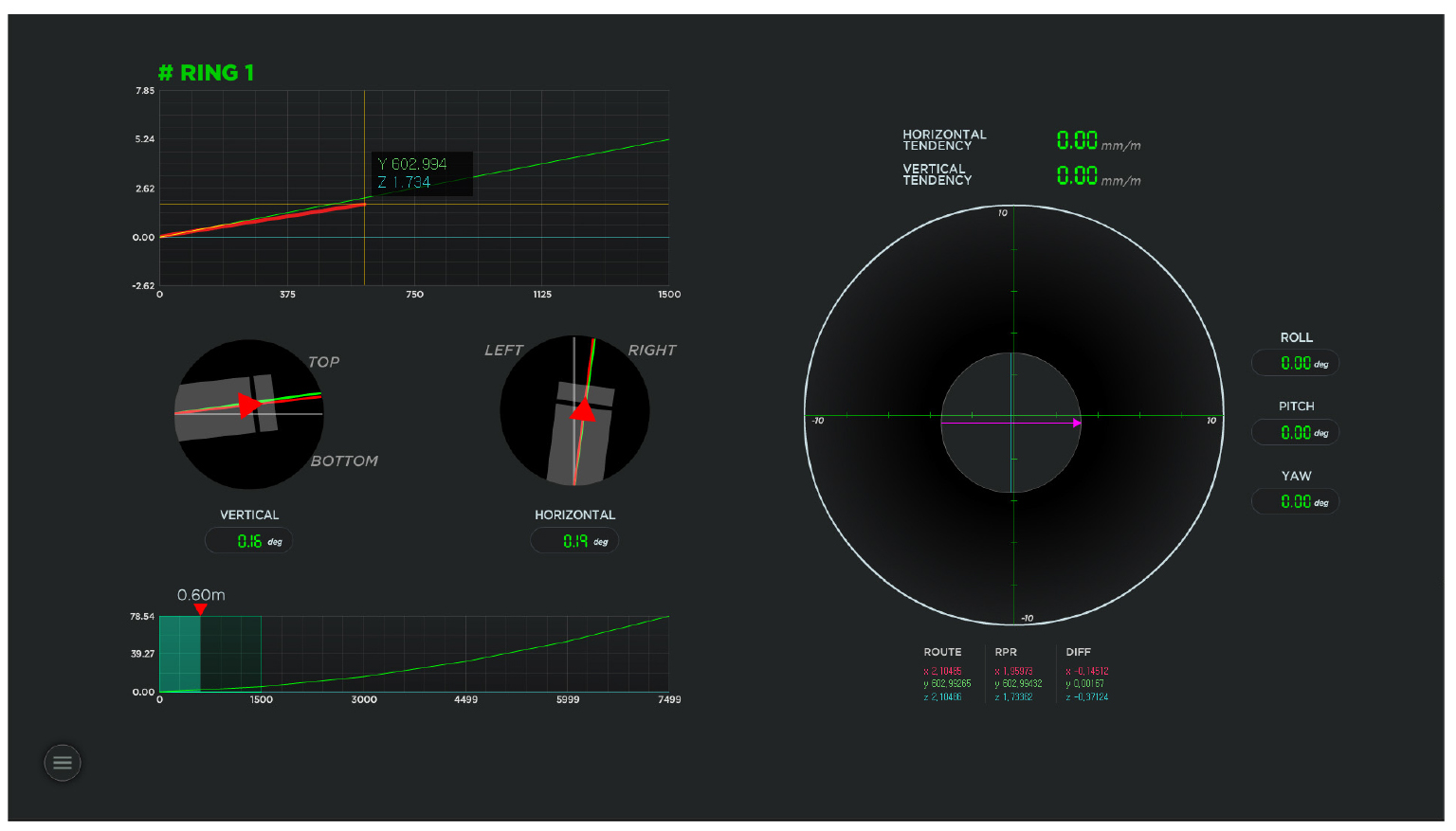
3절에서 설명한 방향제어 모델을 Open TBM의 시뮬레이터에 적용하였다. 대상 Open TBM의 시뮬레이터는 Fig. 8의 모니터링부와 Fig. 9의 컨트롤 패널부로 구성되어 있다. 해당 시뮬레이터는 운전자가 Open TBM의 조작과 반응을 확인할 수 있도록 사용자 인터페이스(UI)를 구성하였고 운전자에 의한 방향제어를 시뮬레이터에 반영하기 위해 본 연구에서와 같이 Open TBM의 방향제어 계통도를 기반으로한 방향제어 알고리즘을 모듈형태로 구현하였다. 즉, Fig. 9의 컨트롤 패널을 이용하여 방향조작을 수행할 경우 Fig. 10의 Open TBM의 굴진방향을 보여주는 네비게이션 디스플레이에 표현된다(KICT, 2022).
4.2 Open TBM 시뮬레이터의 방향제어
3절의 방향제어 모델을 Open TBM의 시뮬레이터에 활용하기 위해서는 컨트롤 패널의 제어에 따른 커터헤드의 회전과 이동에 대한 계산이 필요하다. Fig. 11은 Park et al.(2023)이 Shield TBM 시뮬레이터의 방향제어에 활용한 커터헤드 회전에 의한 커터헤드 이동의 개요도이다. 이 방법은 커터헤드의 형상을 삼각형 좌표로 설정하고 커터헤드의 상하좌우 방향의 회전각에 따른 삼각형의 각 꼭지점 위치의 변화를 계산하도록 구성되어 있다. 본 연구에서는 3절에서 Open TBM의 커터헤드 회전각 계산 방법을 도출하였으므로 위 Shield TBM의 방향제어와 마찬가지로 커터헤드의 이동을 식 (4)와 같이 계산할 수 있다.
커터헤드의 회전에 따른 커터헤드 위치변화를 계산한 이후, 추력실린더의 전진에 따른 커터헤드 위치변화는 식 (5)를 이용하여 계산할 수 있다. 식 (4)와 식 (5)의 변수들은 Fig. 11과 같으며, 식 (5)의 은 추력실린더에 의한 전진 거리(yv – yvi)이다.
5. 결 론
최근 도심지 공사에 Open TBM 신규 장비가 도입되고 있으며, 그 활용이 높아지고 있지만, 다른 분야와 마찬가지로 전문인력의 부족은 심화되고 있다. 시뮬레이터는 신규인력 교육과 기존인력의 전문성 강화를 위해 필요한 상황이다.
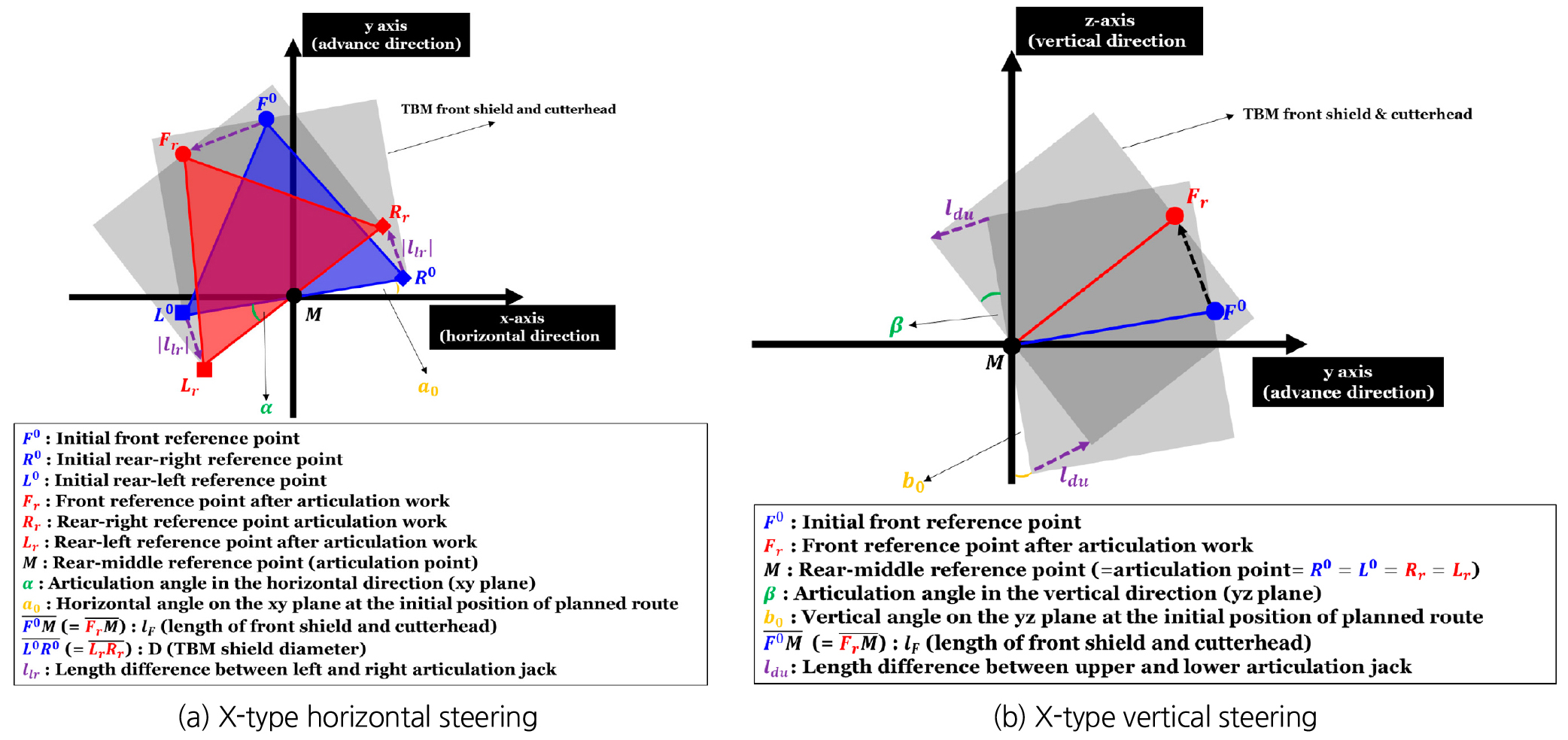
본 연구에서는 Open TBM 시뮬레이터 개발의 일환으로 메인빔 타입 Open TBM의 방향제어모델을 개발하고 시뮬레이터에 적용하는 방법을 제시하였다. Open TBM의 방향제어관련 계통도를 수직방향, 수평방향, 전진방향의 3방향 제어로 단순화하고 3방향제어에 따라 나타나는 레퍼런스 프레임(reference frame, O-xyz)과 이동 프레임(moving frame, O’-x’y’z’)의 편차(deviation)를 이용하여 굴진방향 제어를 모사하는 모델을 개발하였다.
세그먼트 지지방식과 쉴드잭 및 중절잭를 이용한 회전이 이루어지는 Shield TBM과 달리, Open TBM은 그리퍼 지지방식과 그리퍼부의 실린더들을 이용한 회전이 이루어지는 차이를 시뮬레이터에 반영하기 위해 커터헤드, 메인빔, 그리퍼부로 구성되는 Open TBM 방향제어에 대한 계통도를 분석하였고, 그리퍼부에서의 작동을 통해 메인 빔을 이동하여 커터헤드의 회전각을 변화시킨 다음, 추력실린더로 추진하는 굴진 메커니즘을 검토하였다.
방향제어의 핵심 인자인 커터헤드의 회전각을 도출하기 위하여 그리퍼부의 토크실린더에 의한 수직, 수평 방향에서의 제어를 수식화하였다. 이러한 수식화는 시뮬레이터에 반영되는 점을 고려하여 몇가지 가정사항을 기반으로 작성되었다. 또한 Open TBM의 추진과 관련하여 메인 빔과 그리퍼부에 연결된 추력실린더의 길이 변화를 수식화하였다.
시뮬레이터의 컨트롤 패널을 사용하여 방향 제어를 수행할 경우 시뮬레이터 상의 커터헤드 회전과 이동을 구현하기 위하여, 수식화된 커터헤드의 수직과 수평방향 회전각을 활용한 수직과 수평방향으로의 커터헤드 이동과 TBM 전진에 따른 TBM의 위치를 계산하는 방법을 제시하였다.
