

1. 서 론
2. 시뮬레이션 모델 구현
2.1 다물체-유압 해석의 연동 구조
2.2 동역학 해석 모델 구성
2.2 유압시스템 구성
2.3 동역학, 유압시스템 연동 해석 모델 구성
3. 해석 결과
3.1 동일 압력 조건에서의 해석 결과
3.2 각 실린더의 추력 제어 해석 결과
4. 결 론
1. 서 론
최근 TBM의 자동화와 굴진 효율 향상을 위한 기술로 반 연속굴착(semi-continuous excavation) 및 연속굴착(continuous excavation) 개념이 주목받고 있다. 영국의 한 터널 프로젝트에서는 유럽의 TBM 제조사가 반 연속굴착 기술이 적용된 쉴드형 TBM을 실증하였으며, 이를 통해 굴진 효율 향상의 가능성이 입증되었다(BBC, 2024). 이 기술은 세그먼트를 체결하는 동안에도 추진잭과 커터헤드를 동시에 구동할 수 있어, 기존 세그먼트 체결 구간의 비가동 시간을 굴진 시간으로 전환할 수 있는 장점이 있다(Kim et al., 2023, Tröndle et al., 2023). 그러나 최초 세그먼트 체결 시점 및 링 폐합 과정에서 일부 휴식 구간이 남아 있어 완전한 연속굴착에는 아직 한계가 존재한다. 연속굴착을 위한 헬리컬(helical) 또는 스파이럴(spiral) 방식의 터널 라이닝 기술은 1965년 독일의 광산용 장비에서 처음 제안된 이후(DE 1229961 B, Kunststoffverarbeitung Voss, 1966), 터널 시공 기술로의 적용이 검토되었다. 이후 독일에서 반 연속굴착 TBM 기술이 실증 및 상용화에 성공하면서, 2018년 이후 관련 기술개발이 본격적으로 추진되었다.
헬리컬 세그먼트가 적용된 연속굴착형 TBM의 개발을 위해서는 제어 시스템, 동작 성능, 그리고 유압시스템에 대한 종합적인 해석 및 검증이 필수적이다. 연속굴착형 TBM은 세그먼트 체결 과정에서도 굴진을 계속 진행하여 공정 중 정지 시간을 최소화하는 방식으로, 기존 TBM에 비해 추진과 세그먼트 조립이 동시에 이루어지는 복합 동작 특성을 가진다. 그러나 TBM 시제품 제작과 실험에는 막대한 비용과 시간이 요구되며, 대형 장비를 운용하기 위한 충분한 공간 확보와 안전한 시험 환경 조성 또한 쉽지 않다. 이러한 이유로 실험 기반 검증에는 현실적인 한계가 존재하며, 일반적으로 유압 시뮬레이션을 통한 신규 제어 시스템의 성능 평가가 활용된다. 특히 TBM의 추진 과정은 유압 구동계의 제어 명령과 기계 부품의 응답이 상호 작용하는 다중 명령-제어 기반 시스템으로 정의할 수 있으므로, TBM의 실제 거동을 정밀하게 분석하기 위해서는 유압 시스템 해석(Altair Engineering Inc., 2023a)과 기계적 운동 성능 해석(Altair Engineering Inc., 2023b)이 모두 필요하다. 또한 두 해석 간의 명령-제어-응답 피드백을 실시간으로 연동할 수 있는 시뮬레이션 환경 구축이 필수적이다.
기존의 단일(monolithic) 해석 방식은 시스템 전체를 하나의 통합 방정식으로 해석하기 때문에 높은 정확도를 확보할 수 있지만, 각 서브 시스템(동역학 시스템, 유압시스템)의 세부 정보를 하나의 솔버 내에서 계산해야 하므로 모델링 복잡성과 계산 시간이 급격히 증가한다. 이러한 한계를 극복하기 위해 제안된 것이 연동해석(Co-simulation) 기법이다(Gomes et al., 2018). 이 기법은 전체 시스템을 하나의 솔버로 통합하지 않고, 각 서브 시스템에 개별 솔버를 할당하여 독립적으로 해석한 뒤 결합 변수를 통해 데이터를 교환하는 방식이다. Co-simulation 접근법은 차량 서스펜션, 건설기계 등 유압 구동 메커니즘이 포함된 복합 시스템에서 안정성과 효율성을 검증할 수 있는 것으로 보고되었다(Sadjina et al., 2019, Benedikt and Hofer, 2013).
본 연구에서는 헬리컬 세그먼트가 적용된 TBM의 유압 제어 응답을 모사하기 위해 다물체 동역학과 유압시스템을 연동한 시뮬레이션 모델을 개발하였다. 이 모델은 추진잭의 하중 분포와 유압 응답 특성을 분석하고, 제어 알고리즘을 통해 추진잭들의 추력을 통합 제어하도록 구성되었다. 이러한 시뮬레이션을 통해 TBM 설계단계에서 추진 시스템의 동적 성능을 분석하고자 하였다.
2. 시뮬레이션 모델 구현
2.1 다물체-유압 해석의 연동 구조
다물체 동역학과 유압시스템을 연동할 때, 두 해석 영역 간의 신호 교환은 에너지의 전달 방향과 물리적 인과관계를 고려하여 정의되어야 한다(Cellier and Kofman, 2006). 일반적으로 유압시스템은 펌프, 밸브, 실린더 내부의 압력 변화를 통해 힘을 발생시키고, 다물체 시스템은 이 힘에 대한 반응으로 속도 와 변위를 계산한다(Haug, 1989). 두 시스템 간의 일률 교환은 식 (1)으로 표현할 수 있다.
여기서 는 일률, 와 는 기계장치의 힘과 속도, 와는 유압계의 압력과 유량을 각각 의미한다. 이 식이 성립하기 위해서는 유압 해석에서 계산된 압력 기반의 힘이 다물체 모델로 전달되고 이때 피스톤 로드에서 계산되는 속도 정보를 다시 유압 해석에 피드백하는 구조를 유지해야 한다. 이러한 일률 기반 피드백 구조는 에너지 일관성을 보존하면서, 입력·출력 신호의 위상 지연을 최소화하여 수치적 안정성을 확보하게 된다(Möller et al., 1995, Grewal and Nikravesh, 1997, Krus and Weddfelt, 1996).
TBM 추진잭의 경우, 유압 회로에서 발생한 압력은 실린더의 추력으로 전달되고, 그 운동 결과인 속도는 유량 변화로 다시 환산되어 회로 내 압력 응답에 영향을 미친다. 이러한 상호작용을 고려할 때, 다물체 해석 영역에서는 실린더 로드의 속도() 가 유압 해석의 입력으로 작용하고, 유압 해석 결과로 계산된 힘() 이 다시 다물체 해석의 외력으로 반영되어야 한다. 본 연구에서는 이와 같은 일률 기반 피드백 구조를 적용하여 TBM의 추진잭과 유압시스템 간의 상호작용을 구현하고, 이를 통해 추진력 분포 및 추력 중심의 제어 특성을 분석하고자 하였다. 연동 해석에서 명령-응답 흐름도는 Fig. 1과 같다.
2.2 동역학 해석 모델 구성
다물체 동역학 해석은 Altair MotionSolve (Altair Engineering Inc., 2023b)를 기반으로 수행되었으며, TBM 추진계의 실제 기계적 구성을 반영한 모델을 구축하였다. 전체 모델은 커터헤드, 메인 프레임, 추진잭 어셈블리, 세그먼트 지지 구조, 그리고 헬리컬 세그먼트 접촉면으로 구성된다. 추진잭은 총 30개의 실린더로 배치되었으며, 각 실린더는 메인 프레임에 고정되고 페데스탈이 세그먼트에 접촉하도록 모델링되었다. 각 추진잭은 커터헤드 축 방향으로 추진력을 전달할 수 있도록 1 자유도(prismatic) 조인트로 정의하였으며, 유압 해석 결과에서 계산된 힘이 해당 축을 따라 로드에 입력된다. 반대로, 추진잭의 속도 정보를 유압 해석 모델의 부하 입력으로 피드백되도록 구성하였다.
헬리컬 세그먼트 접촉면은 약 3°의 경사각을 갖는 나선형 평면으로 단순화하여 모델링하였으며, 각 추진잭의 작용 방향이 세그먼트 위치에 따라 서로 다르게 분포되도록 구현하였다. 해석 효율을 향상하기 위해, 실제 헬리컬 세그먼트의 3차원 곡면 형상을 단순화하고, 모든 구성 부재의 질량·관성 정보를 노드 단위로 집중시킨 Node-based 모델을 구성하였다. 이를 통해 전체 해석 시간을 최소화하고, 추진잭 하중 분포 및 추력 중심(center of thrust) 거동을 집중적으로 분석하고자 하였다.
기존 TBM(7.9 m-diameter EPB-TBM) CAD모델(Fig. 2)을 기반으로 헬리컬 세그먼트의 2개 링을 추가로 모델링하였다. 접촉을 위해 추진잭과 세그먼트 모델에 대해서 메쉬 모델링 작업을 수행하였다(Fig. 3). 동역학 모델에 포함된 Body, Joint, Contact의 세부 명칭 및 역할은 Table 1에 정리하였다. Input은 유압 해석에서 발생하는 힘을 동역학 모델의 피스톤 로드에 부하로 입력하고, 이때 발생하는 피스톤 로드의 속도를 Output으로 유압 해석으로 전달한다.
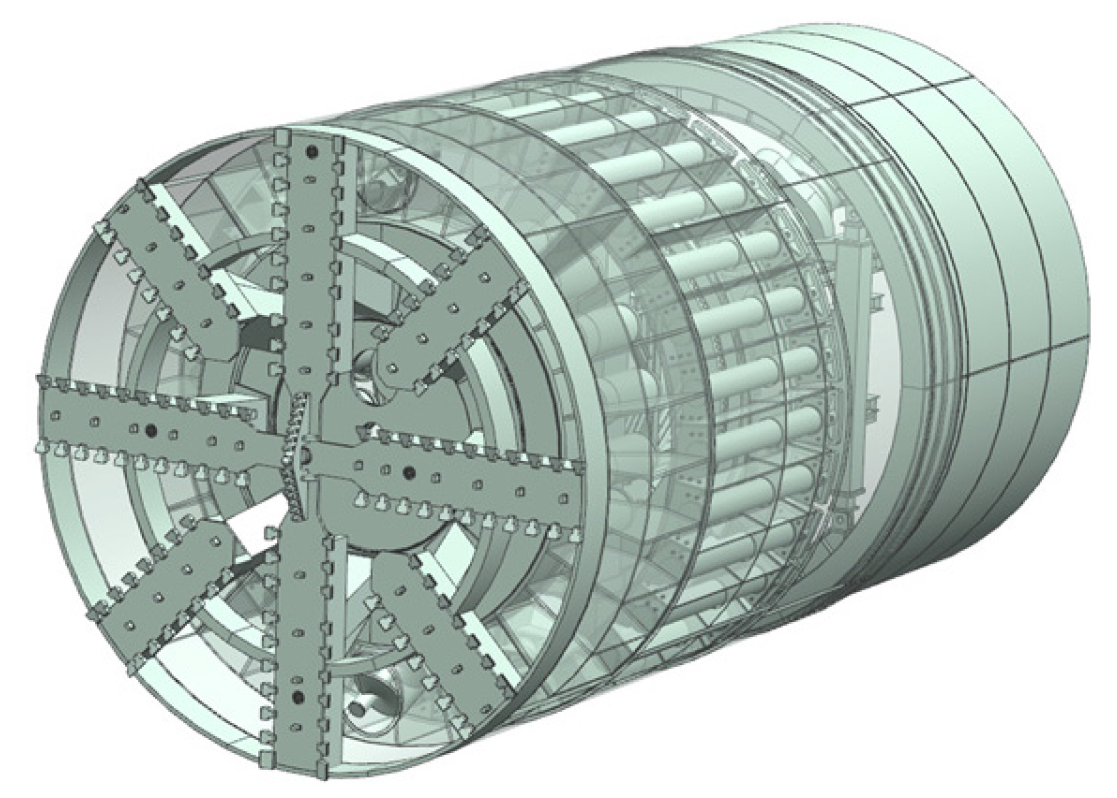
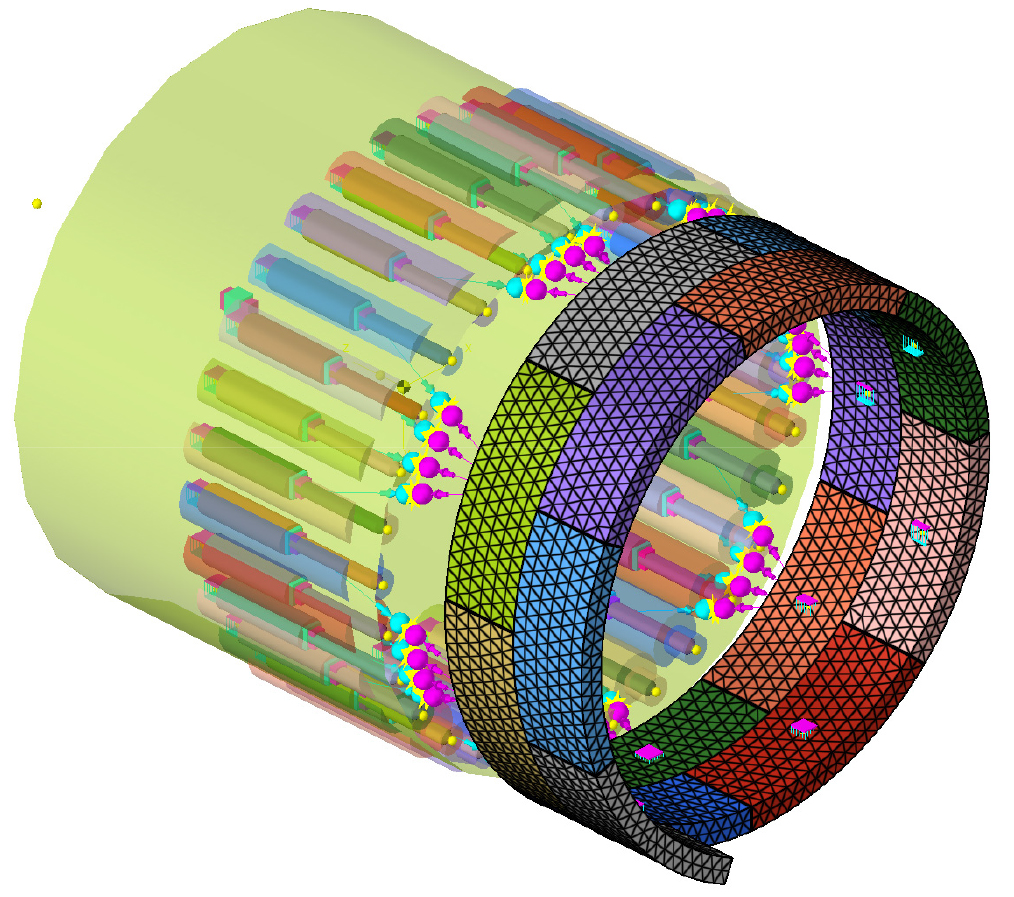
Table 1.
Configuration of the node-based multi-body dynamic model with helical segments
2.2 유압시스템 구성
2.2.1 기존 유압시스템 분석
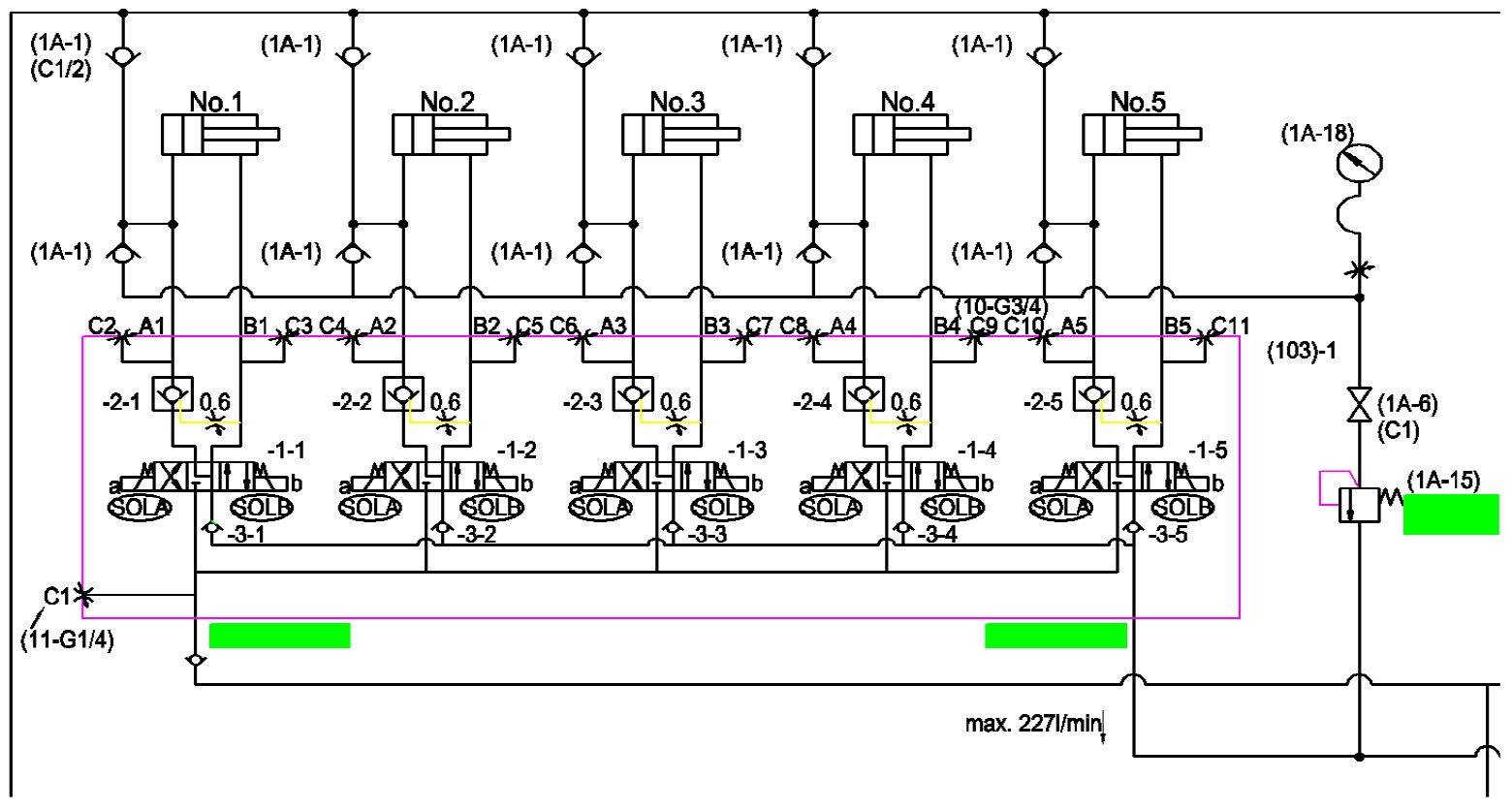
기존 K사에서 개발된 TBM 추진용 유압시스템은 1개의 유압 펌프를 입력으로 30개의 유압 밸브 통해 연결된 각각의 추진잭를 구동하는 방식으로 구성되어 있다. 펌프의 정격 토출량은 약 107 L/min이며, 전체 30개의 추진 실린더에 균일한 압력을 공급한다. 각 실린더의 유량은 비례제어 밸브 30개를 통해 조절되며, 입력 전압에 따라 개구율이 선형적으로 제어된다. 전진 시 릴리프 압력은 약 337 bar, 후진 시 140 bar로 설정되어 있다. 각 실린더는 내경 275 mm, 로드 외경 200 mm, 스트로크 2,250 mm의 제원을 가진다.
기존 회로는 Fig. 4와 같이 5개의 실린더가 하나의 압력센서를 공유하는 그룹 제어 방식으로 설계되어 있어, 개별 실린더의 압력을 독립적으로 제어할 수 없다. 이 구조에서는 동일 그룹 내 실린더들이 동일한 압력 신호를 입력받기 때문에, 평면 세그먼트와 같이 추진잭이 세그먼트에 도달하는 거리 및 시간이 동일한 경우에는 큰 문제가 없다. 하지만, 헬리컬 세그먼트의 경사면에 도달하는 각 추진잭의 접촉시간이 다른 경우 정확한 추력 제어가 어려워진다. 따라서, 추진잭과 세그먼트 간의 접촉을 확인하기 위해서 각 추진잭에 압력센서가 개별적으로 부착될 필요가 있다.
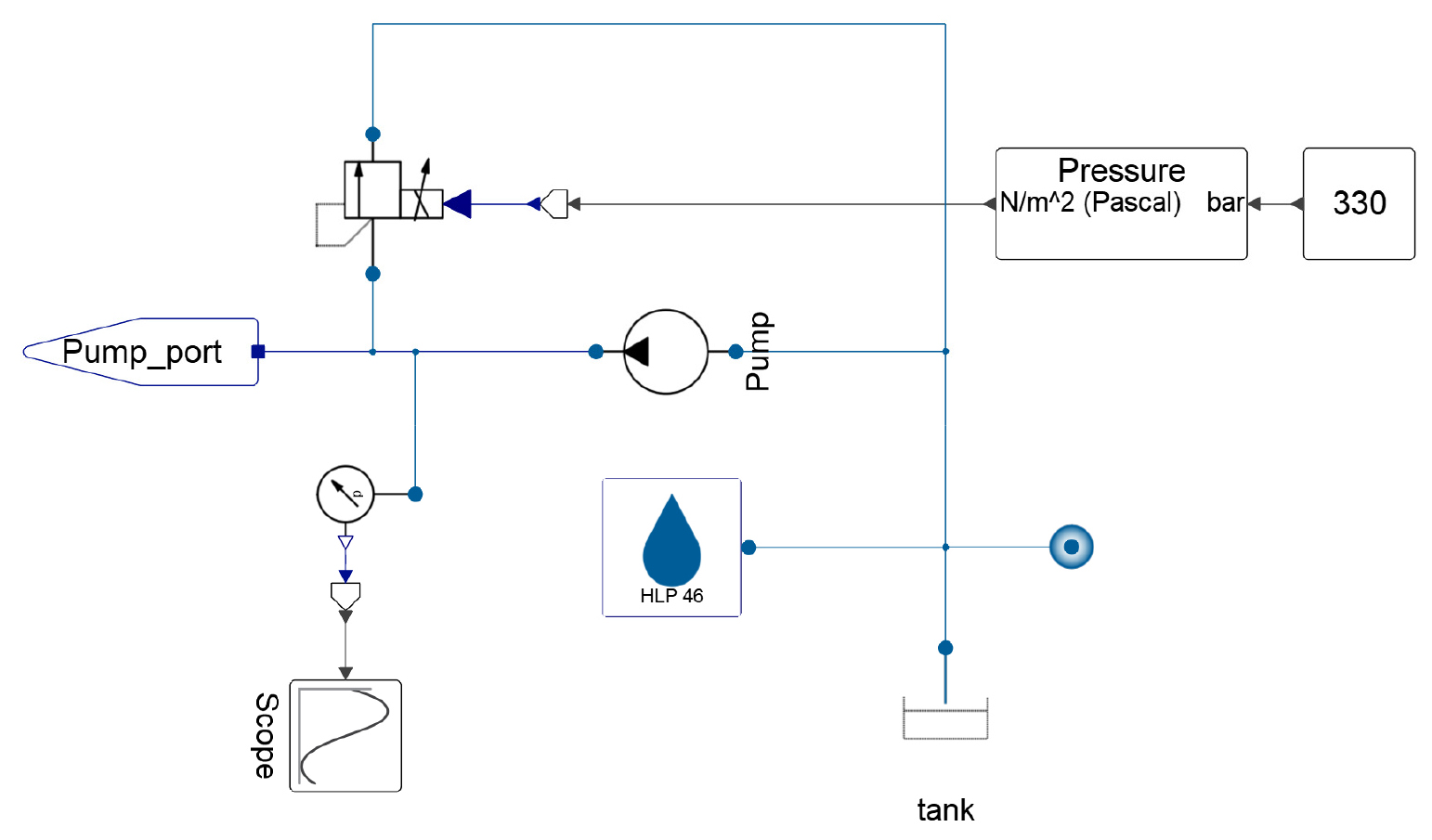
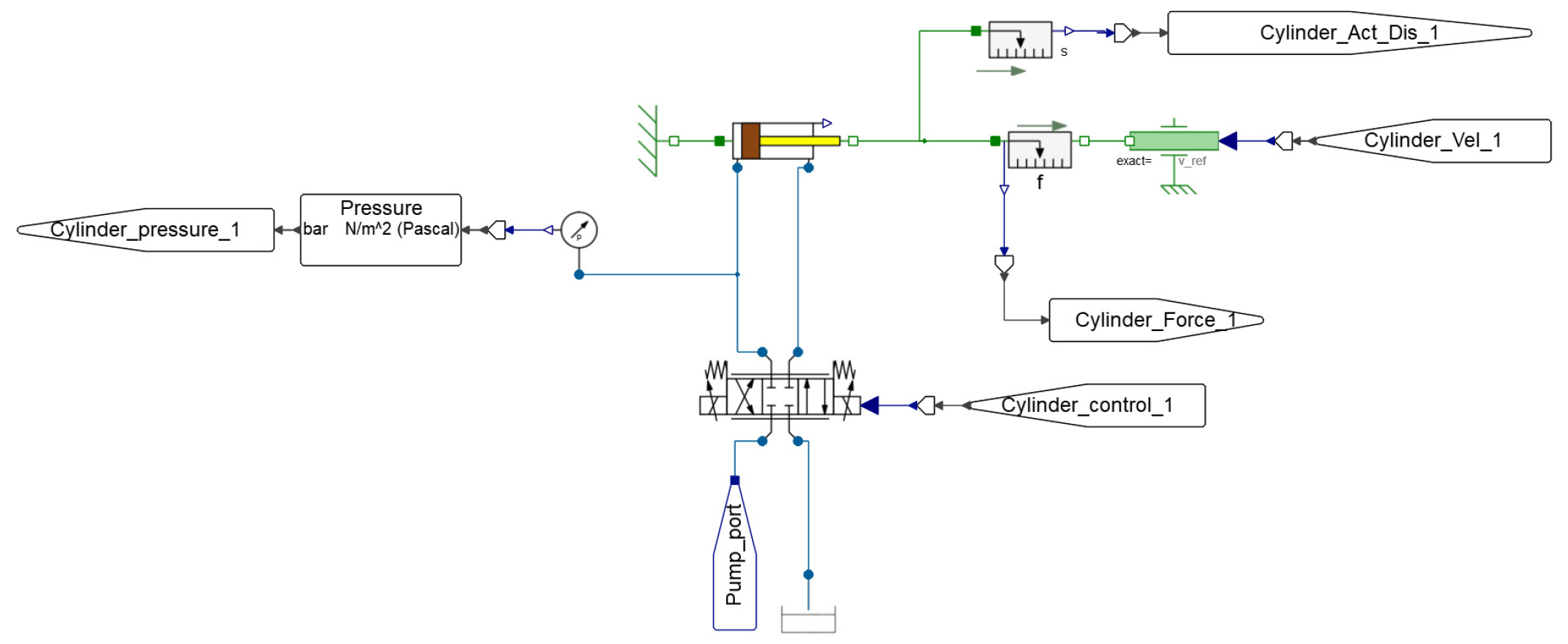
2.2.2 유압시스템 모델
기존 유압 회로 분석 데이터를 기반으로 유압 및 제어 시스템의 시뮬레이션 모델을 구성하였다. Fig. 5는 압력을 발생시키는 유압 펌프의 블록 다이어그램을 나타내고, Fig. 6는 추진잭, 압력센서 및 비례 제어밸브로 구성된 블록을 나타낸다. 유압 펌프 블록은 30개의 추진잭 블록으로 유량을 공급하며, 유압 컴포넌트의 입력 사양은 모두 제작사 사양을 기준으로 설정하였다.
2.3 동역학, 유압시스템 연동 해석 모델 구성
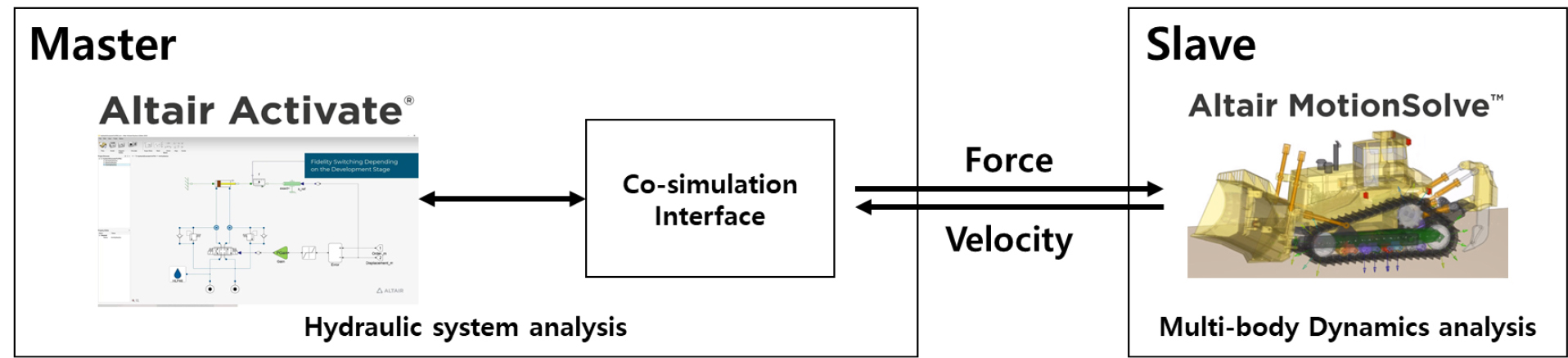
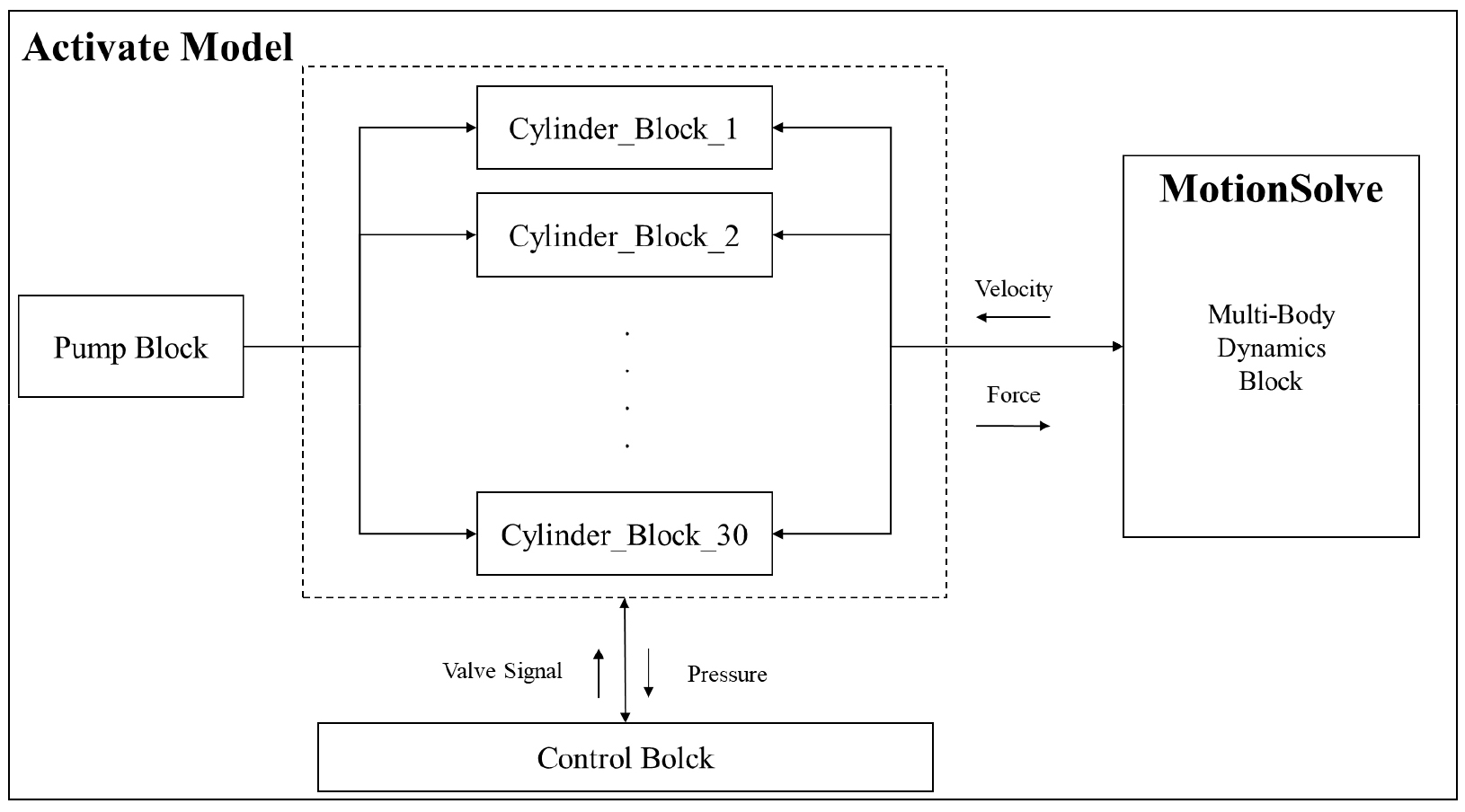
Fig. 7과 같이, 유압 및 제어 시스템 해석은 Altair Activate (Altair Engineering Inc., 2023a)가 Master 역할을, 다물체 동역학 해석은 Altair MotionSolve (Altair Engineering Inc., 2023b)가 Slave로 구성하여 연동 해석을 수행하였다. 이 구조를 통해 각 추진 실린더의 압력은 제어 블록에서 실시간으로 계측되며, 설정된 목표 압력에 도달할 때까지 비례제어를 통해 밸브의 입력 전압이 조정된다(Fig. 8). 실린더에서 발생한 압력은 추진력으로 변환되어 동역학 모델에 전달되며, 이에 따라 발생한 실린더의 속도 응답은 다시 유압시스템으로 피드백되어 부하 조건으로 작용한다. 이러한 양방향 피드백 구조를 통해 유압시스템과 추진 메커니즘 간의 상호작용을 실시간으로 모사할 수 있다.

3. 해석 결과
3.1 동일 압력 조건에서의 해석 결과
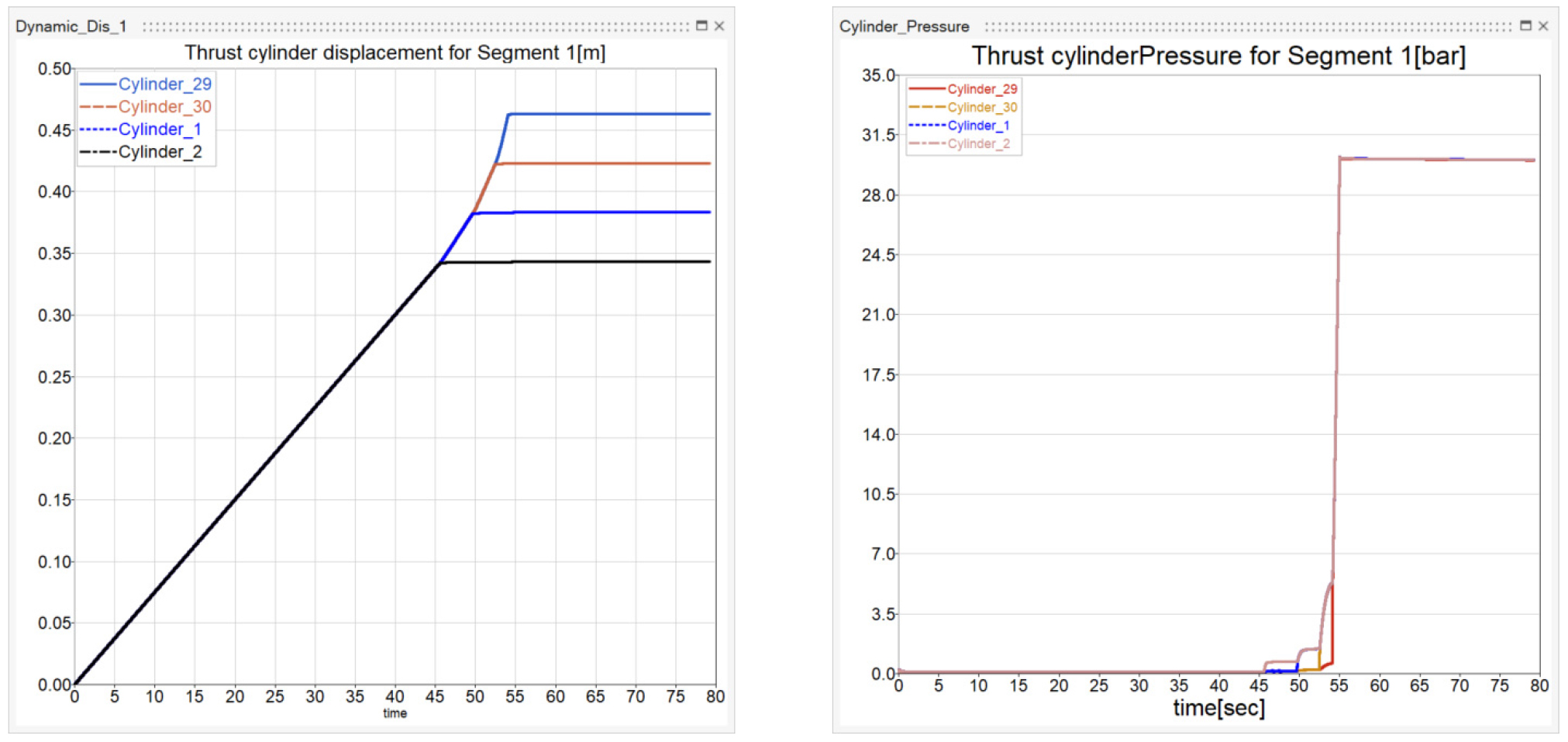
헬리컬 세그먼트 적용 시 추진잭의 하중 제어 특성을 검증하기 위해, 유압시스템과 다물체 동역학 모델 간의 연동 해석을 수행하였다. 비례 제어밸브에는 제어 알고리즘을 적용하여, 실린더 입력 측 압력이 30 bar(약 178.2 kN)에 도달하면 밸브가 자동으로 차단되도록 설정하였다. 추진잭이 세그먼트에 접촉하게 되면 압력이 급격히 상승하며, 이러한 압력 변화로부터 접촉 발생 시점을 명확히 확인할 수 있었다. 밸브가 닫힌 이후에는 내부 유량이 차단되어 실린더 내부 압력이 일정하게 유지되었으며, 이에 따라 추력 또한 안정적으로 보존됨을 확인하였다. Fig. 9은 1개의 세그먼트에 접촉되는 실린더의 변위 변화와 압력 변화를 나타낸 것으로, 접촉이 발생하는 순간 압력이 급격히 상승하고 이후 구간에서 압력 변화가 거의 없는 것을 확인할 수 있다. 이는 밸브 잠김에 따라 내부 체적 유량이 차단되어, 실린더 내 압력이 일정하게 유지되고 추력이 안정적으로 유지되는 상태임을 의미한다. 또한, 동일한 세그먼트에 작용하는 각 실린더의 변위가 헬리컬 형상으로 인하여 각각 압출 변위의 차이를 확인할 수 있다.
3.2 각 실린더의 추력 제어 해석 결과
동일 압력으로 해석을 수행한 결과 각 추진잭이 세그먼트에 도달하는 시점과 추진잭-세그먼트 간의 접촉 조건으로 인해 해석 시간이 상당히 소요되었다. 그러나 추진잭이 세그먼트에 접촉하기 전의 시간은 추력 중심(COT)의 변화와 직접적인 관련이 없으므로, 추진잭과 세그먼트가 이미 접촉한 상태를 대상으로 동력학 해석 모델링을 수정하였다. 이때, 추진잭과 세그먼트의 접촉 조건을 고정 조건으로 단순화함으로써 해석 시간을 약 4배 단축할 수 있었다.
시뮬레이션 모델은 Fig. 10와 같이 총 30개의 추진잭이 12° 간격으로 배치되어 있으며, 세그먼트 접촉 이후 단계에서는 각 추진잭에 장착된 비례 제어밸브를 개별적으로 제어하여 전체 추진계의 COT을 조정하였다. COT는 각 추진잭의 추력과 배치 위치에 의해 결정되는 합력 중심으로, TBM의 추진 방향과 자세 안정성을 결정하는 핵심 요소이다. COT가 목표값에서 벗어날 경우 추진력이 편심되어 장비 본체와 세그먼트에 비대칭 하중이 발생할 수 있으며, 이는 궤도 이탈, 세그먼트 파손 위험 증가로 이어질 수 있다. 따라서 COT의 정밀 제어는 TBM 추진 방향 및 세그먼트 안정성 확보를 위해 반드시 요구되는 핵심 기술 요소이다. 기존 방식에서는 추력 중심의 이동 특성을 극좌표계에서 선형적으로 표현할 수 있다는 점에서, 일반적으로 사인함수를 이용한 힘 분포 방식이 적용됐다.
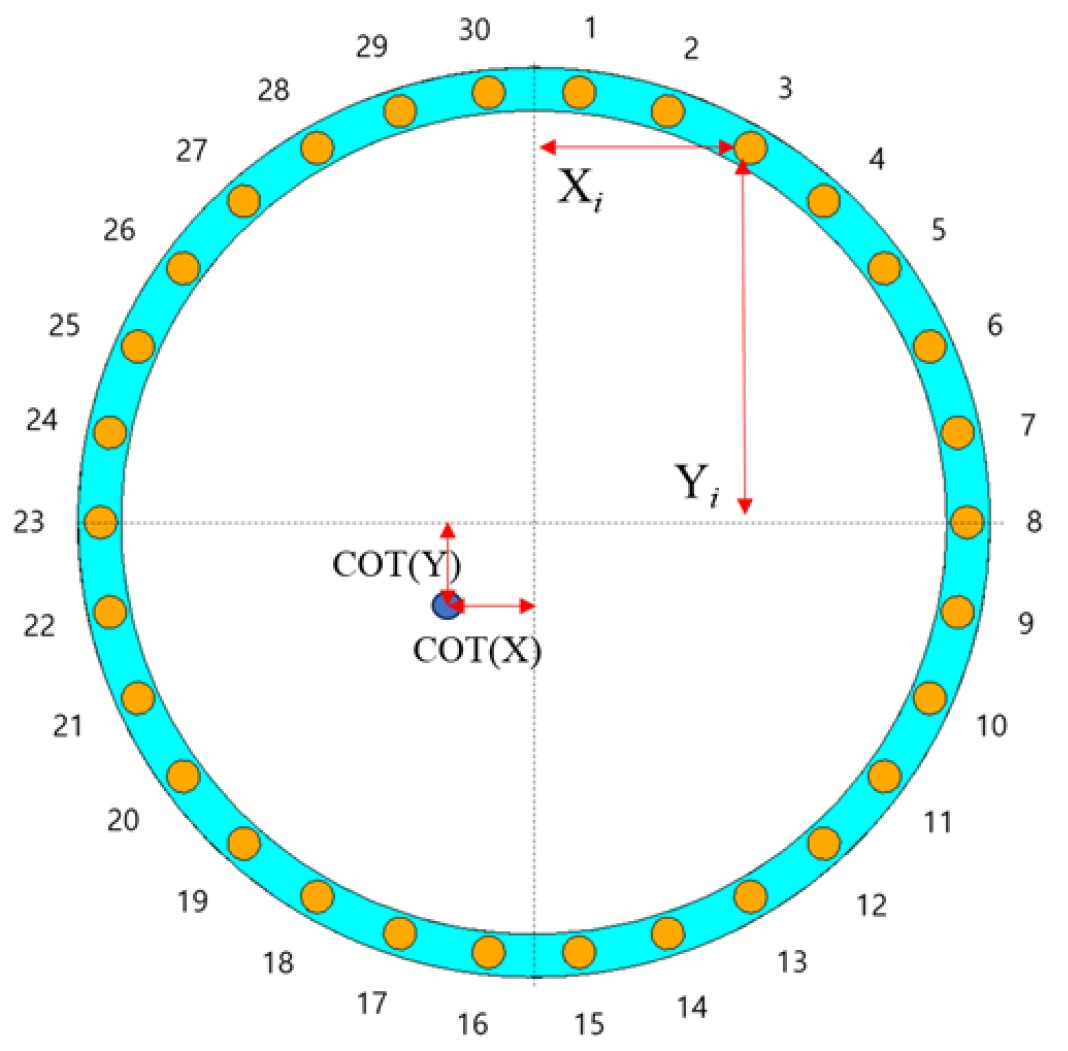
세그먼트 접촉 이후 단계에서는 각 추진잭의 비례 제어밸브를 개별적으로 제어하여 전체 추진계의 COT을 조정하였다. 기존 방식에서는 일반적으로 사인함수를 이용하여 COT을 제어하였으며, 이는 극좌표계에서 추력 중심의 이동 특성을 정확하게 표현할 수 있기 때문이다.
여기서 는 각 추진잭에 걸리는 하중, 는 기준 하중, 는 각 추진잭의 위치각도, 는 원하는 추력 중심의 각도, 는 진폭, 는 주기를 의미한다.
기존 추력 분포 모델은 제어 변수로 사용하여 COT 방향을 간접적으로 제어하는 방식이다. 그러나 COT의 정의가 x, y 좌표계 기반으로 주어지기 때문에, COT를 직접적으로 제어하기 위해서는 추력 분포식을 식 (3)과 같이 선형화하여 직교 좌표 기반으로 변환할 필요가 있다.
여기서, , 는 목표 COT의 좌표이며, COT 좌표는 아래 식 (4)와 같이 정의 된다.
이때, 식 (3)을 x축 성분으로 전개하면 식 (5)와 같이 정리 할 수 있다.
이때 각 추진잭이 균등 간격으로 배치되어있다고 한다면, 식 (6)의 조건이 적용되어 식 (7)과 같이 정리된다.
이 식 (7)에 식 (4)의 조건을 넣어 정리하면 식 (8)과 같이 표현된다.
동일한 과정을 축성분에 적용하면, 식 (9)가 도출된다.
따라서, 값은 아래의 식 (10)과 같이 정의된다.
이를 모두 식 (3)에 정리하면, TBM 추진잭 시스템의 추력 분포는 식 (11)같이 직교 좌표형으로 변환할 수 있다.
여기서, 는 i번째 추진잭의 추력, 은 전체 잭이 공급해야 하는 총추력, 은 전체 잭의 개수, 은 잭의 원주 배치 반경, 는 목표 COT의 보정 좌표, 는 해당 잭의 원주상 배치 각을 의미한다.
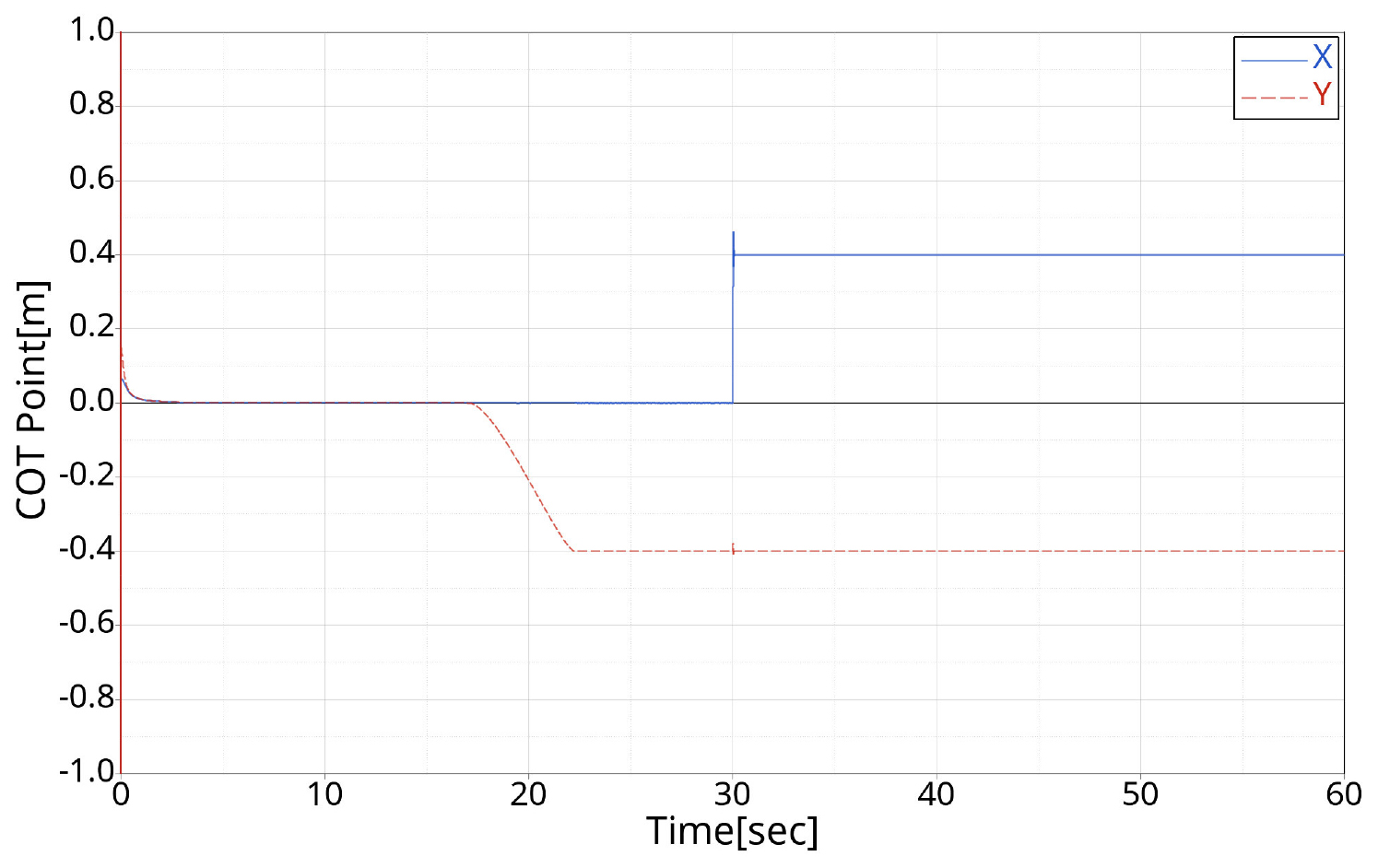
시뮬레이션 모델이 목표 COT을 정확히 추종하는지 검증하기 위해, 식 (11)의 COT 목표 좌표를 초기 0-30 s 구간에서는 (0, −0.4) m로 설정하고, 30 s 이후에는 (0.4,−0.4) m로 변경하였다. 그 결과, Fig. 11 및 Fig. 12과 같이 COT가 설정값에 따라 정확히 이동함을 확인하였다.
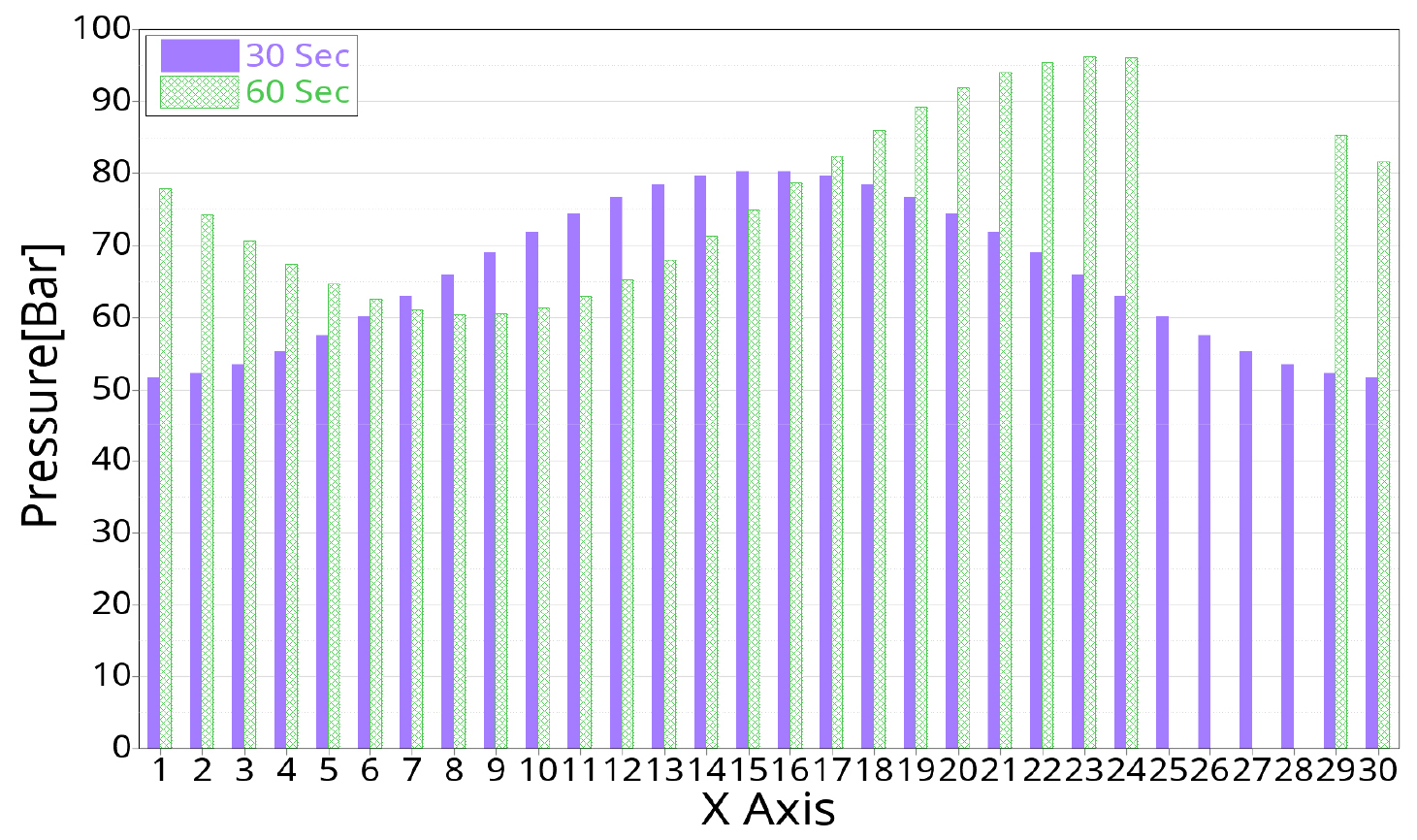
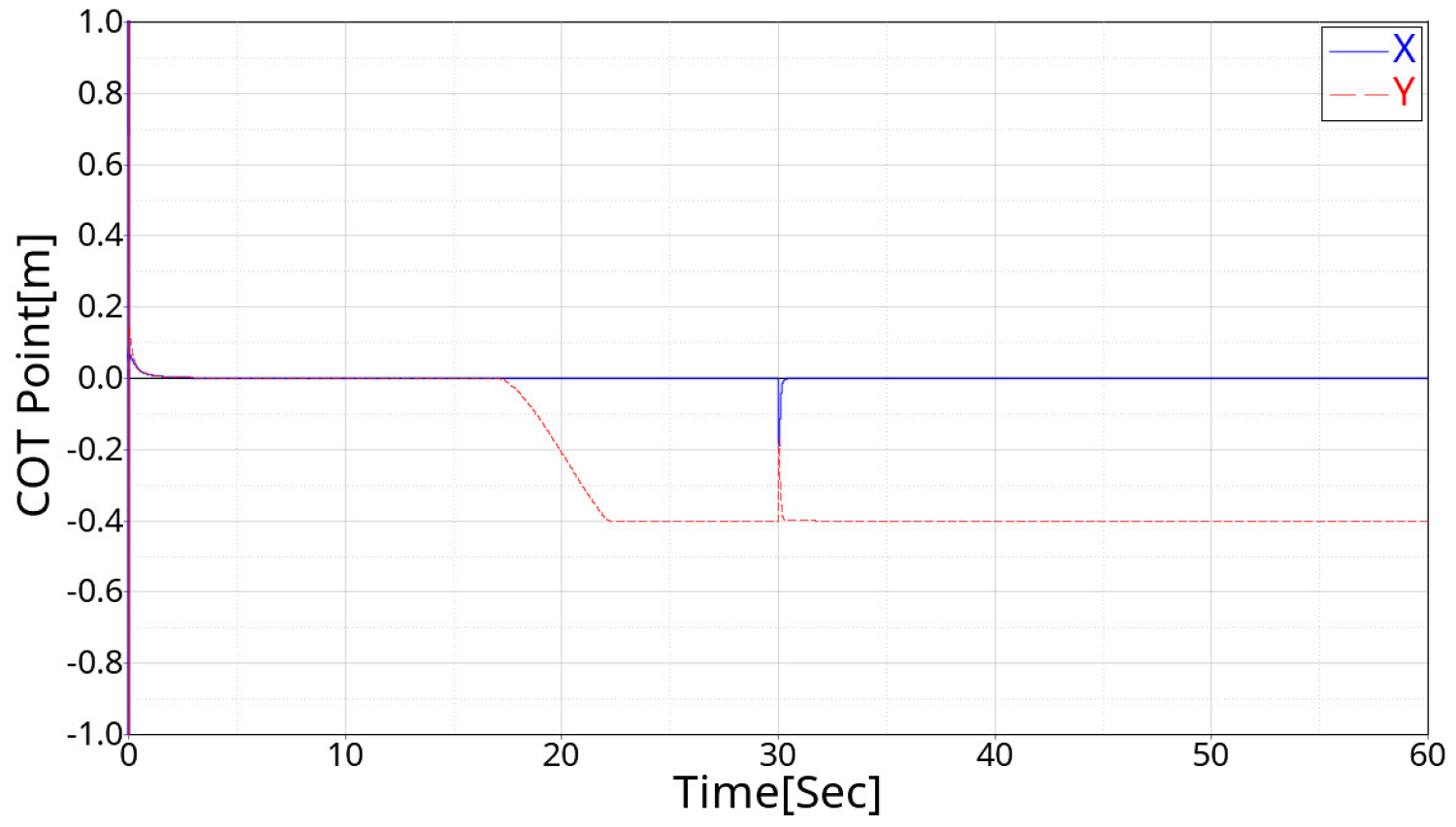
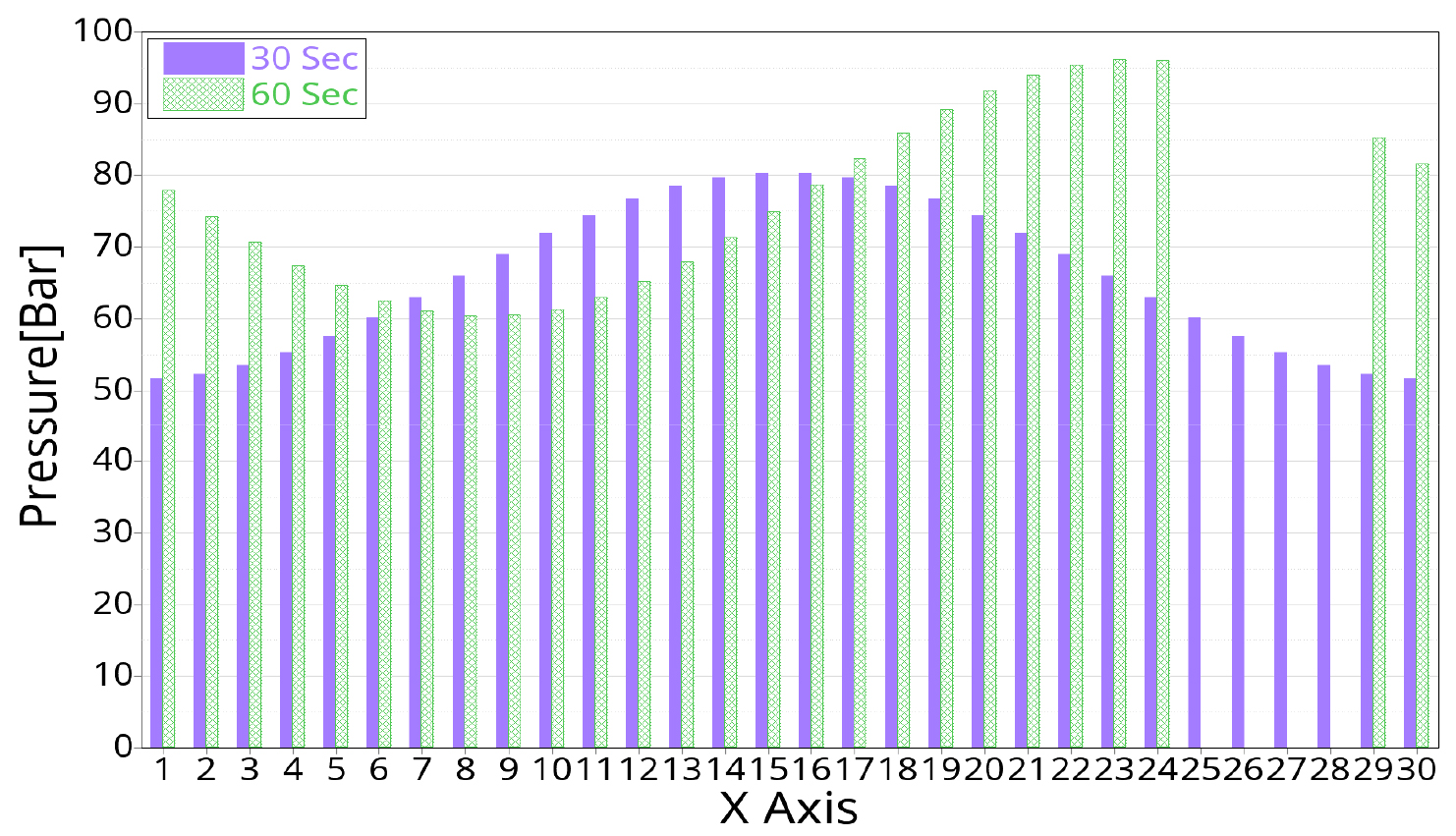
또한, 연속굴착 방법에서는 세그먼트 조립을 위해 추진잭 배열 중 일부 추진잭이 휴지 상태에서도 굴진을 진행하기 때문에 휴지 잭의 추력을 0으로 고정한 상태에서 나머지 활성 잭들의 추력을 재분배하여 총추력 및 COT을 유지하는 알고리즘이 필요하다. 식 (11)은 균등 분포 항(첫 번째 항)과 COT 보정을 위한 1차 모멘트 보정항(두 번째 항)으로 구성된 선형 근사모델이며, 본 연구에서는 세그먼트 조립을 위해 25-28번 잭을 휴지 상태로 둔 조건에서 나머지 26개의 활성 잭만을 사용하여 전체 추력과 COT을 유지하는 최적 추력 분포를 도출하였다. 이를 위해 최소노름(minimum-norm) 기반 폐형식(force-redistribution) 해법을 적용하였으며, 해당 결과를 시뮬레이션 모델에 반영한 결과 Fig. 13 및 Fig. 14과 같이 4개의 잭이 휴지 상태일 때에도 총추력과 COT이 초기 상태((0, -0.4)m)와 같이 유지됨을 확인하였다.
4. 결 론
본 연구에서는 헬리컬 세그먼트를 적용한 연속굴착형 TBM의 추진계 거동을 정밀하게 예측하고 제어하기 위해, 다물체 동역학과 유압시스템 해석을 연동한 시뮬레이션 모델을 구축하였다. 본 연구의 주요 내용을 요약하면 다음과 같다.
(1) 커터헤드, 메인프레임, 30개의 추진잭, 그리고 헬리컬 세그먼트로 구성된 노드 기반(Node-based) 다물체 동역학 모델을 구축하여, 실제 7.9 m급 TBM의 기하학적 형상과 구속 조건을 정확히 반영하였다.
(2) 기존 TBM의 유압시스템을 분석하고, 헬리컬 세그먼트의 나선형 접촉면에서 발생하는 하중 특성을 반영할 수 있도록 유압 회로를 개선하였다. 기존 시스템은 5개의 실린더가 하나의 압력센서를 공유하는 그룹 제어 방식으로 구성되어 있었으나, 본 연구에서는 각 실린더에 개별 비례 제어밸브와 압력센서를 1:1로 대응시켜 독립 제어가 가능한 구조로 변경하였다.
(3) MotionSolve와 Activate를 연동한 다물체-유압 연동 해석 모델을 구축하여 추진계의 연성 거동을 분석하였다. Force-Velocity 기반의 양방향 피드백 구조를 구현함으로써, 유압시스템의 압력 변화를 추진잭의 힘으로 작용하고, 다물체 동역학 모델의 추진잭의 속도 변화가 유압시스템으로 피드백되는 상호 연동 구조를 완성하였다. 이를 통해 헬리컬 세그먼트 적용 시 발생하는 COT 제어와 유압 응답 특성을 가상환경에 구현하였다.
제안된 시뮬레이션 모델은 실제 TBM 제작 및 제어 시스템 개발 이전 단계에서 추진계 하중 분포, 유압 응답, 제어 알고리즘의 유효성을 사전에 검증할 수 있는 시뮬레이션 기반 설계 검증 도구로 활용될 수 있다. 특히, 헬리컬 세그먼트 구조에 따른 하중 조건과 추력 중심의 변화를 정량적으로 평가할 수 있어, 향후 헬리컬 세그먼트 TBM의 제어 시스템 개발에 효과적인 해석 기반 분석 도구로 활용될 것으로 기대된다.
