

1. 서 론
2. 광산현장용 무인 이동체 탑재형 형상화 장비 구현
2.1. 시스템 구성
2.2. 형상화 장비 구현
2.3. 네트워크 환경 구성
3. 3D 형상화 시스템의 적용
3.1. 실내 모형 형상화
3.2 광산 갱도 형상화
4. 결 론
1. 서 론
Jeon et al.(2014)이 언급한 것처럼 무분별하게 개발된 후 오랫동안 방치된 폐광지역에서 발생하는 다양한 형태의 광산 재해를 예방하기 위하여 폐광 내부 상태를 파악하고 이를 도면화 하려는 시도가 이루어지고 있다. 기존 방식은 주로 Kim et al.(2021)과 Kim et al.(2020a)의 특허처럼 지하공간을 관통하는 시추공을 굴설하고 시추공을 통해 레이저 거리 센서를 회전시켜 측정하는 3차원 스캐닝 장비를 투입시켜 광산의 형상을 재구성하는 방법이 주로 사용되었다. 최근에 고속 라이다 기술이 발전함에 따라 Kim et al.(2020b)과 Kim et al.(2022)은 360도 고속 회전을 통해 단면의 형상을 획득할 수 있는 라이다 장비를 활용하여, 입구가 넓고 측정 구간이 긴 수직갱도나 대규모 싱크홀 재난 현장 등에 활용할 수 있도록 제작되었다.
최근 ‘사람의 도움 없이 스스로 외부 환경을 인식해 상황을 판단하고 임무를 수행하는 이동체’로 정의되는 무인 이동체(UV:Unmanned Vehicle)기술이 발전함에 따라, 폐광산 운영 환경 관점에서 무인 이동체 운영 가능성과 활용 수요에 대한 종합적인 검토가 필요한 시점이다. 이러한 사례로, Kim et al.(2019)와 Singh et al.(2023)은 이러한 자율 주행 기술과 객체 인식 기술을 폐광산 갱도 조사에 활용하였다. 또한, Neumann et al.(2014), Tatsch et al.(2023)과 Ghosh et al.(2017)은 4륜 이동체를 이용하여 광산환경에서 자율 주행을 통해 광산 형상을 맵핑한 결과를 제시하였다. 특히 폐광 현장에서는 공간이 폐쇄적이기 때문에 Durrant-Whyte et al.(2006)가 제안하는 SLAM (Simultaneous Localization and Mapping) 기술을 활용하면 고속 라이다 센서로부터 획득된 정보를 통해 광산 형상을 실시간으로 3차원 형상으로 재구성하면서 현재 위치를 파악하기에 매우 용이하다. 이러한 기술을 바탕으로, Singh et al.(2021)와 Fekete(2010)은 광산 현장에서 고속 라이다로 얻어진 많은 수의 측정점 분포 분석을 통해 광산 구조물의 안전성을 조사하는데 활용하였으며, Zlot et al.(2013)은 측정점으로부터 추출된 면정보를 효과적으로 활용하여 광산 현장에 적용된 사례를 제시하였다. 최근 Kim et al.(2024)은 고속 라이다를 육상, 수중, 항공 무인 이동체에 장착하여 광산 현장에 적용하기 위한 기술을 조사하고, 그 적용 가능성을 평가하였다.
본 논문에서는 무인 이동체 기술을 광산 현장에 적용하기 위하여 고해상도 라이다를 장착한 4족 보행 로봇을 투입하여 3차원 형상화 작업을 수행하였다. 2종의 라이다 센서와 카메라 그리고 로봇을 제어하기 위한 PC가 내장되어 있는 형상화 장비를 구현하는 과정을 설명하였다. 제작된 형상화 장비가 4족 보행 로봇에 장착되어 광산 갱도 내에 적용될 때 탐사 가능 범위에 대해 검토하였다. 안정적인 무인 이동체 제어 및 센서 데이터 전송을 위한 무선 통신환경의 운영 조건을 조사하였다. 보다 원거리 탐사를 위하여 최대 3 km 광케이블 릴을 4족 보행 로봇에 장착하여 운영하는 방안에 대해 제안하였다. 아울러 고속 라이다로부터 획득된 수많은 측정 데이터를 갱도 환경에 적합한 형태로 근사화하여 운영하는 방안을 제안하였다. 마지막으로, 실제 가행 광산 현장에 4족 보행 로봇에 장착된 라이다 영상으로 3D 형상화한 결과를 제시하였다.
2. 광산현장용 무인 이동체 탑재형 형상화 장비 구현
2.1. 시스템 구성
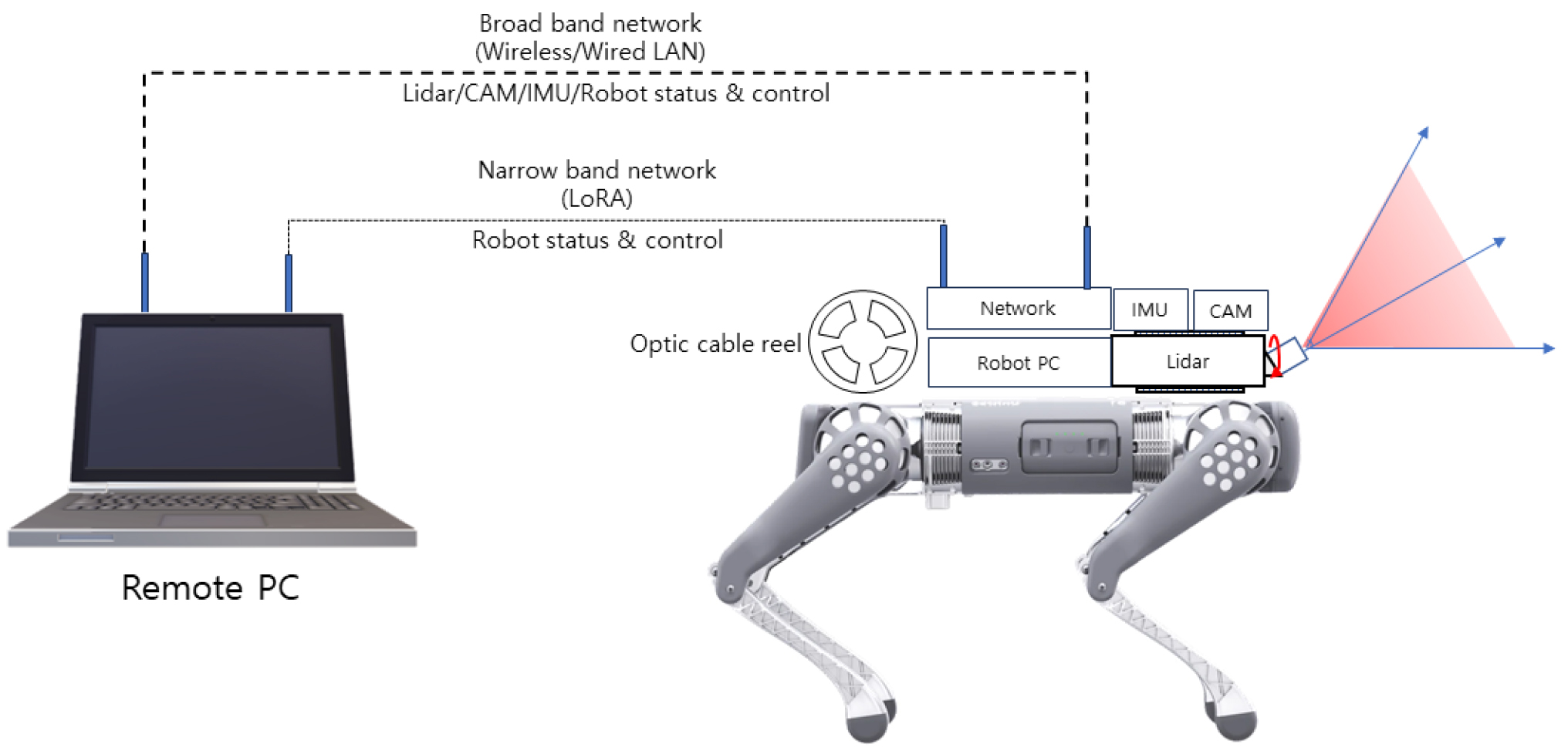
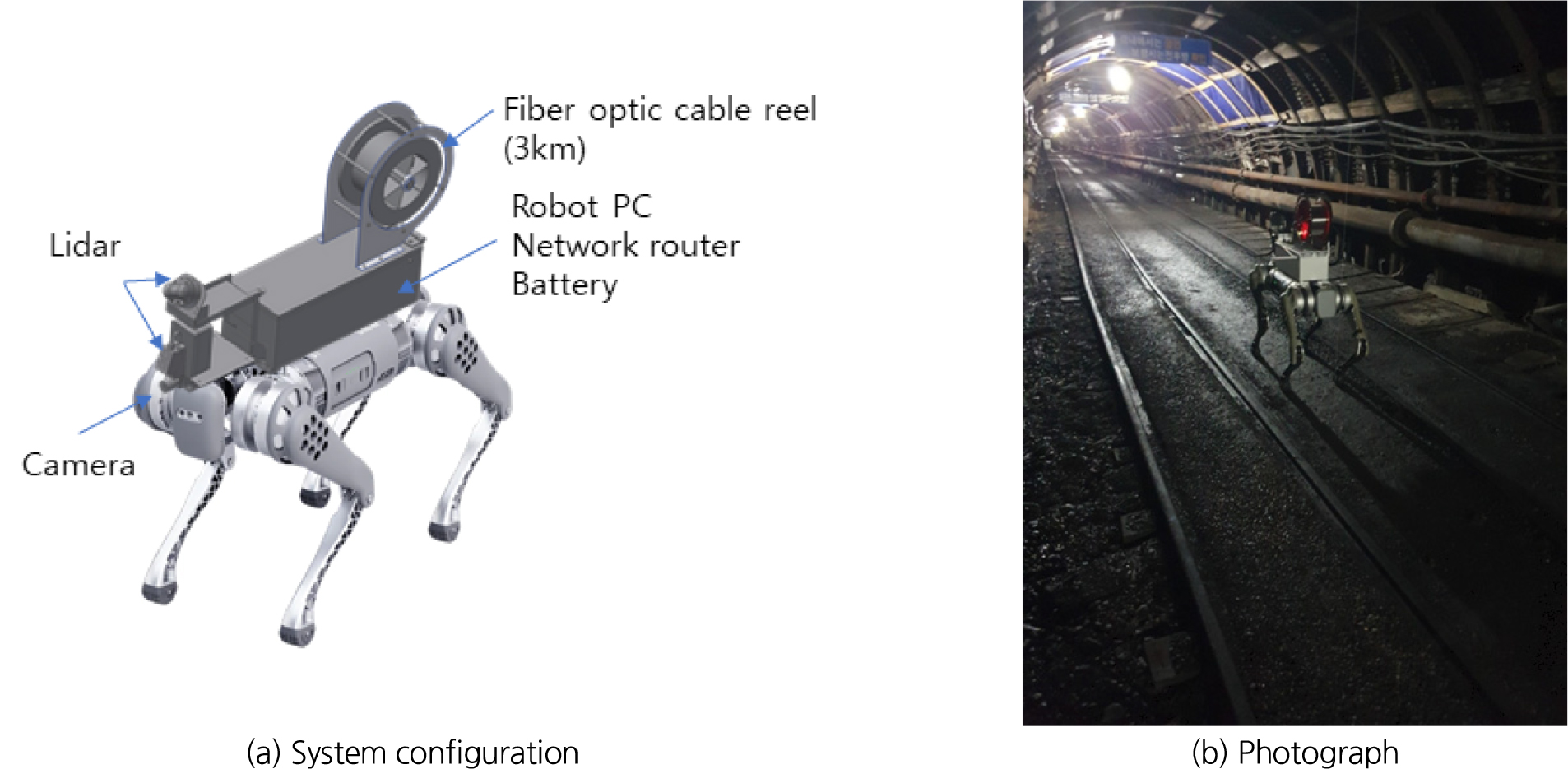
광산 현장에 적용하기 위한 무인 이동체 탑재형 형상화 장비의 구성도는 Fig. 1과 같다. 이 장비는 무인 이동체에 카메라(Cam), 관성센서(IMU:Inertial Measuring Unit), 고속 라이다를 장착하고 있으며, 이 센서들로부터 획득된 데이터를 수집하고, 로봇상태와 움직임을 제어하기 위한 소형 컴퓨터(Robot PC)를 설치하였다. 소형 컴퓨터는 데이터 전송량이 많은 광대역 네트워크 환경인 무선 랜 (wireless LAN)나 유선 랜랜 (wired LAN)을 통해 외부의 원격컴퓨터(remote PC)로 라이다, 관성센서, 카메라 영상을 전송하며 아울러 로봇 상태와 제어 명령을 수신한다. 아울러 광대역 네트워크 장애시 대안으로 데이터 전송량은 적지만 통신거리가 긴 협대역 네트워크 환경인 LoRa 통신체계를 통해 간단한 로봇 상태와 명령어를 통신할 수 있도록 구성하였다.
무인 이동체로는 Unitree사의 B1모델을 사용하였다. 폐광산 현장은 오랫동안 방치되어 지하수가 원활하게 배수되지 않아 갱도가 슬러지 상태인 경우가 많다. 또한, 천장과 벽면에서 지하수가 흘러내려 고여 있는 경우가 빈번하다. 특히 인력이 투입되지 않은 상태여서 광산 작업 시 설치되었던 구조물들이나 장애물이 방치되어 있는 경우가 많다. 이러한 작업 환경으로 4륜형 이동체나 궤도형 이동체는 전복 위험으로 인하여 투입이 제한된다. 이와 같이 불규칙한 장애물이 많고 물기가 많은 환경에서는 4족 보행 로봇과 같은 무인 이동체가 유리하다. 본 논문에서 사용된 4족 보행 로봇의 사양은 Table 1과 같다. 저가형 모델이면서 방수 방진 등급이 IP68로, 수중에서도 운용이 가능하여 지하수가 흐르고 슬러지가 많은 폐광산 현장에서 운용할 수 있으며, 작업후 유지관리 또한 매우 용이하다. 광산 3D 형상화를 위한 라이다 장비로서 Hypersen Tech.사의 HPS-3D160모델과 Unitree사 L1모델을 사용하였다. 두 라이다의 사양은 Table 2와 같다. HPS-3D160 모델은 고정형(Solid-state)라이다로서 카메라처럼 수평범위(HFOV) 76°와 수직범위(VFOV) 32°에서 160×60개 점을 동시에 측정할 수 있으며, 초당 35 프레임 측정이 가능하여 1초에 최대 336,000개의 점을 측정할 수 있다. 방수등급이 IP67로서 완전방수가 가능하여, 지하수가 많은 광산현장에서 유용하다. 반면, L1모델은 고속 회전형(Spinning) 라이다로, 거리 측정 센서를 고속으로 회전시켜 수직 90° 측정 범위를 수평방향으로 360°회전시켜 반구영역을 1초에 1,500,000점을 측정할 수 있다. 그러나 고속 회전 구조 때문에 방수등급이 IP54로 생활방수 등급에 해당하며, 진동이 많이 발생하여 항공 드론과 같은 가벼운 무인 이동체에서는 사용이 어렵다.
Table 1.
Specification of the quadruped robot

Table 2.
Specification of two types of LiDARs

2.2. 형상화 장비 구현
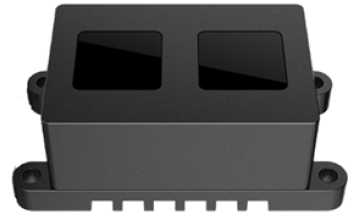
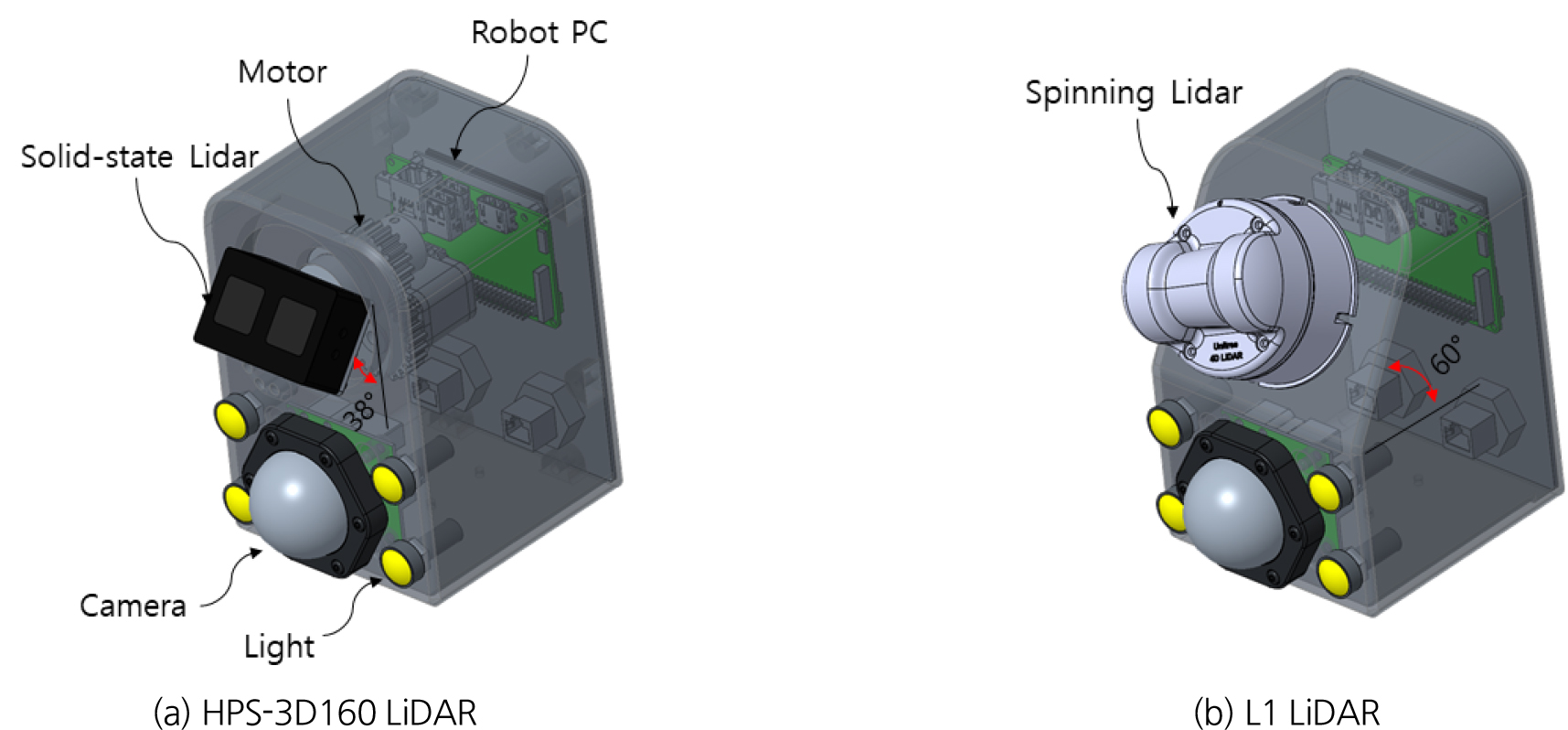
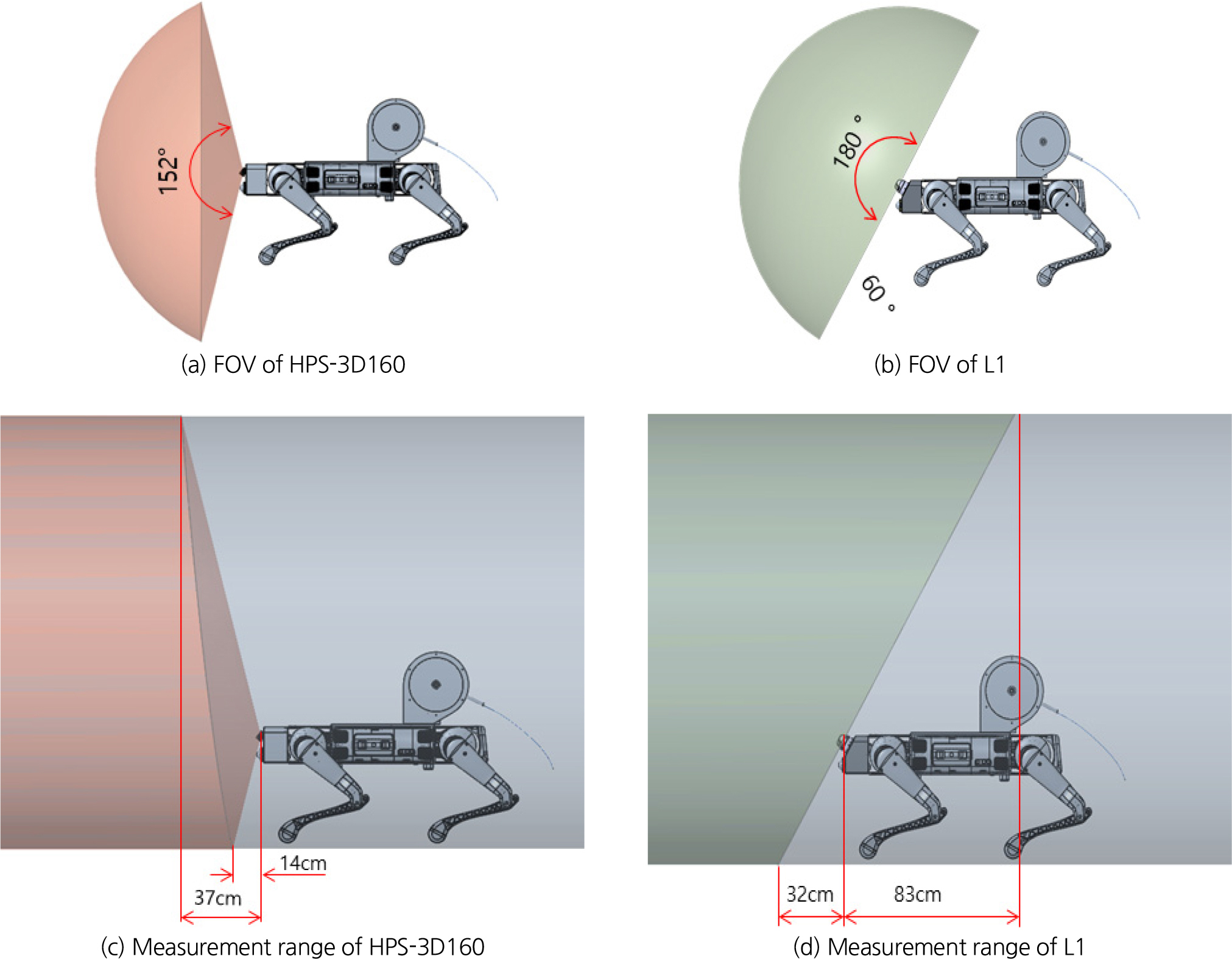
카메라, 조명, 라이다, 로봇컴퓨터(robot PC)를 일체화하여 제작한 형상화 장비는 Fig. 2와 같다. Table 1에서 볼 수 있듯이 본 논문에서 사용된 무인 이동체인 Unitree사 B1의 탑재 가능 무게(payload)는 20 kg이기 때문에 무거운 형상화 장비도 장착 가능 하지만, 탑재 가능 무게가 작은 항공 드론이나 소형 무인 이동체에서도 활용 가능 하도록 형상화 장비의 총 무게를 3 kg미만으로 제작하였다. Fig. 2(a)는 고정형 라이다를 기반으로 제작된 형상화 장비이고, Fig. 2(b)는 회전형 라이다를 기반으로 제작된 형상화 장비이다. Fig. 2(a)에서 볼 수 있듯이, 고정형 라이다의 수평 범위를 고려하여 38°도 경사로 고정하여 내부 장착된 모터를 360° 회전시켜 측정 한다. 이를 통해 Fig. 3(a)와 같이 전방 152° 범위를 스캔할 수 있다. 회전형 라이다 기반 형상화 장비는 Fig. 2(b)와 같이 바닥면으로부터 60° 경사로 설치하여, 무인 이동체의 상부에 설치되었을 때 Fig. 3(b)와 같이 몸체와 간섭 없이 갱도의 바닥과 상부를 스캔할 수 있도록 하였다. 두 가지 형태의 라이다를 전면부에 장착한 4족 보행 로봇이 직경 2 m 크기의 원통형 터널 내부에 진입했을 때 측정되는 범위는 Fig. 3(c)와 (d)와 같다. 고정형 라이다를 장착한 경우 Fig. 3(c)와 같이 바닥면은 14 cm 전방부분부터 측정되고 천장부는 37 cm 전방부터 측정이 이루어진다. 반면에 회전형 라이다를 장착한 경우 Fig. 3(d) 와 같이 바닥면은 32 cm 전방이 측정되지만 천장부는 83 cm 후방부터 측정이 시작된다.
2.3. 네트워크 환경 구성
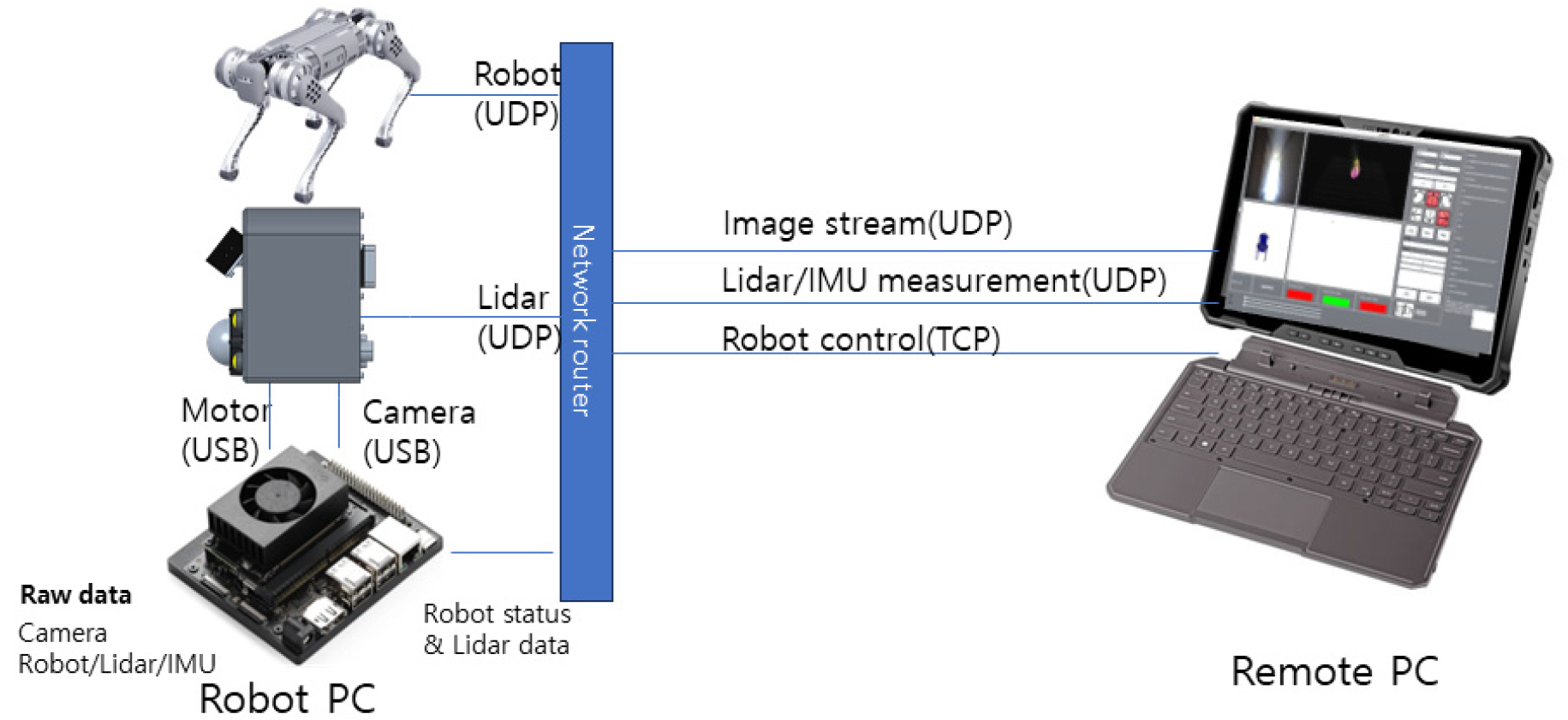
무인 이동체 탑재형 형상화 장비를 운영하기 위한 광대역 네트워크 환경 구성은 Fig. 4와 같다. 로봇 PC는 4족 보행 로봇과 UDP 방식의 통신을 통해 로봇의 상태와 명령어를 교환하며, 형상화 장비에 장착된 라이다는 UDP, 카메라와 모터는 USB를 통해 통신한다. 이러한 통신 체계를 통해 로봇 PC는 데이터를 취득하여 내부에 저장하고, 원격 제어 PC로 카메라 영상, 라이다 /관성센서 측정데이터 및 로봇 상태 데이터를 전송한다. 원격 제어 PC는 화면에 카메라 영상과 라이다 측정 결과를 표시하며, 로봇의 움직임을 제어하는 명령어는 TCP를 통해 전송한다. 이때, 로봇 PC와 원격 제어 PC는 네트워크 라우터를 통해 연결된다. 네트워크 라우터는 랜 케이블이나 광케이블을 이용하는 유선 연결방식과 Wi-Fi를 이용하는 무선 연결방식을 동시에 지원한다.
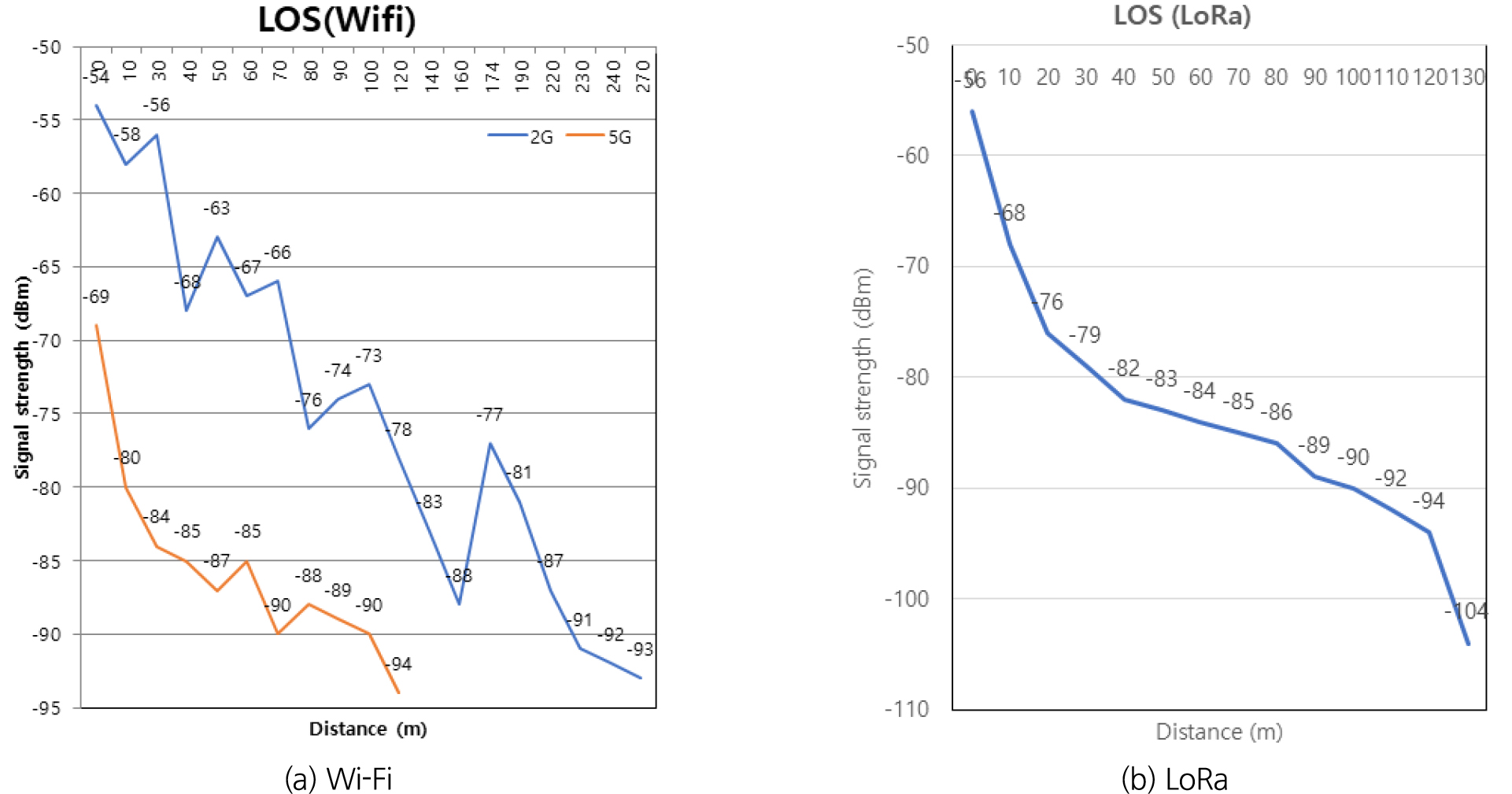
일반적으로 Wi-Fi를 이용한 무선 연결 방식은 최대 450 Mbps를 데이터 전송량을 지원하고, 지향성 안테나와 증폭기를 사용할 경우 개방된 환경에서 최대 1 km 까지 통신이 가능하다. 하지만 광산 갱도 내에서 무선통신을 사용할 경우갱도 벽면에서 전자파의 반사에 의한 전파 감쇠가 심하게 일어나기 때문에 전송 거리가 급격히 감소한다. 이러한 갱도 내 가시영역에서 Wi-Fi 신호강도를 조사하기 위하여 600 m 직선 갱도가 있는 태백의 대한석탄공사 장성갱도에서 실험 하였으며, 그 결과는 Fig. 5와 같다. Fig. 5(a)는 광대역 통신을 위한 Wi-Fi의 거리별 신호강도를 나타낸 것이다. 2.4 GHz 대역은 250 m거리까지 이동했을 때 –93 dBm의 신호강도를 측정할 수 있었고, 5 GHz 대역은 110 m까지 –94 dBm의 신호강도를 측정할 수 있었다. 2.4 GHz 대역을 사용했을 때 70 m까지 –70 dBm 이내 강도일 때 안정적인 데이터 전송이 가능하며, 그 이상의 거리나 5 GHz 대역 신호는 연결이 불안정하여 사용하기 어려웠다. 이를 통해 안정적인 데이터 전송을 위해서는 최소 –70 dBm의 신호강도가 요구됨을 확인할 수 있다. 무선 이동 통신 거리를 연장하기 위해서는 중계기(repeater)를 설치하면서 이동해야 하는데, 이는 70 m마다 중계기를 설치해야 하므로 입구에서부터 깊은 곳에 있는 현장까지 무인 이동체를 무선을 통해 이동시키는 것이 거의 불가능하다. Fig. 5(b)는 협대역 통신을 위한 400 MHz대역의 LoRa 통신의 거리별 신호강도를 나타낸 것이다. 일반적으로 LoRa통신은 개방된 공간에서 최대 15 km까지 통신이 가능 하지만, 갱도 내에서는 130 m 거리까지 –104 dBm으로 신호 강도가 측정되었고, 그 이상의 거리에서는 측정이 불가능했다. 이는 Wi-Fi보다 통신이 가능한 거리가 더 짧았으며, 특히 무인 이동체가 움직일 때 신호 연결이 끊어지는 현상이 발생하였다.
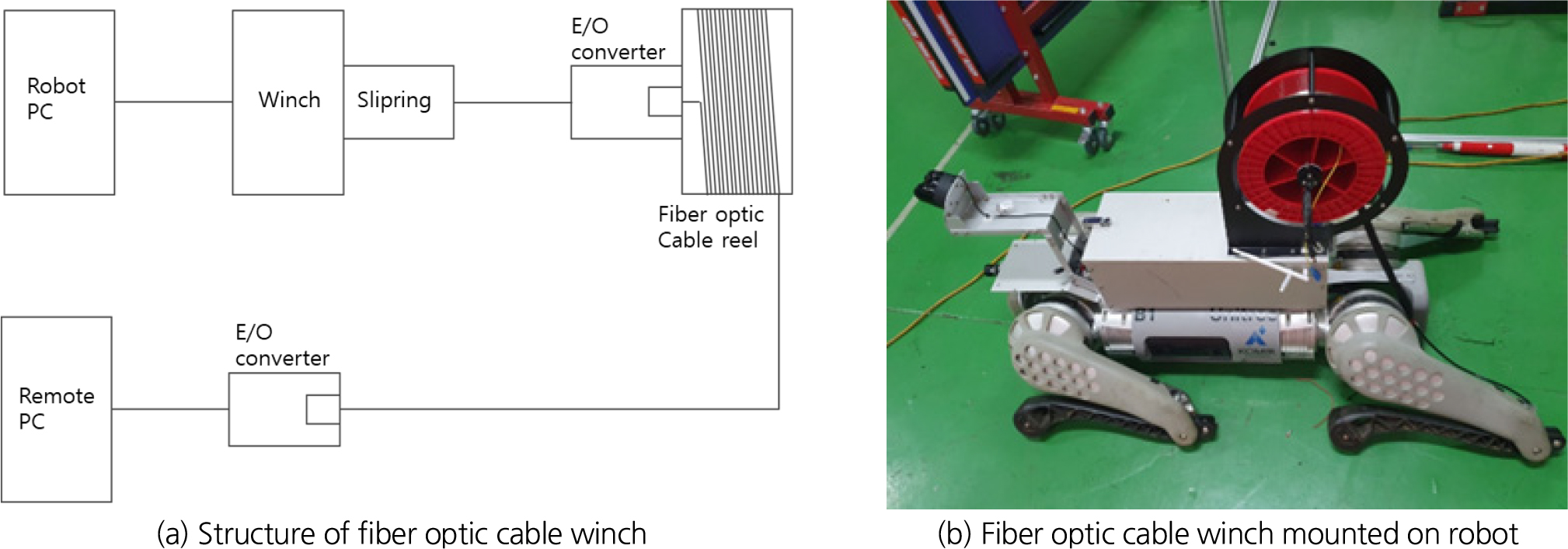
이러한 문제점을 극복하기 위해, 무인 이동체에 케이블 릴을 장착하고 유선 케이블을 전개하면서 이동하는 유선 통신 방식이 효율적이다. 그러나 일반 랜 케이블 경우 무겁고 통신 가능 거리도 100 m로 짧아 활용하기 어렵다. 따라서 본 논문에서는 Fig. 6과 같이 직경이 0.25 mm이고 길이가 3 km인 싱글모드 광케이블 릴을 사용하여 유선 통신 네트워크를 구축하였다. 무인 이동체가 전진하면서 자연스럽게 케이블이 풀리도록 Fig. 6(a)와 같이 윈치 형태로 제작하였다, 케이블 릴이 회전할 때 중심축에서 케이블이 꼬이지 않고 같이 회전할 수 있도록 슬립링을 적용하였다. 광전변환기(E/O converter)를 사용하여 광신호를 8가닥의 이더넷 신호로 변환하고, 이를 슬립링을 통해 사용할 수 있도록 제작하였다. 또한, 0.25 mm 직경의 광케이블은 너무 가늘어 한 번 사용한 케이블은 재사용이 어렵기 때문에, 광케이블 릴을 교체할 수 있도록 카트리지 방식으로 제작하였다. Fig. 6(b)는 4족 보행 로봇 등에 설치된 모습으로, 케이블 릴이 이탈하지 않도록 고정하는 허브 축과 덥개에 슬립링과 광전변환기가 설치되어 있으며, 사용 후 손쉽게 교체할 수 있도록 제작하였다.
3. 3D 형상화 시스템의 적용
3.1. 실내 모형 형상화
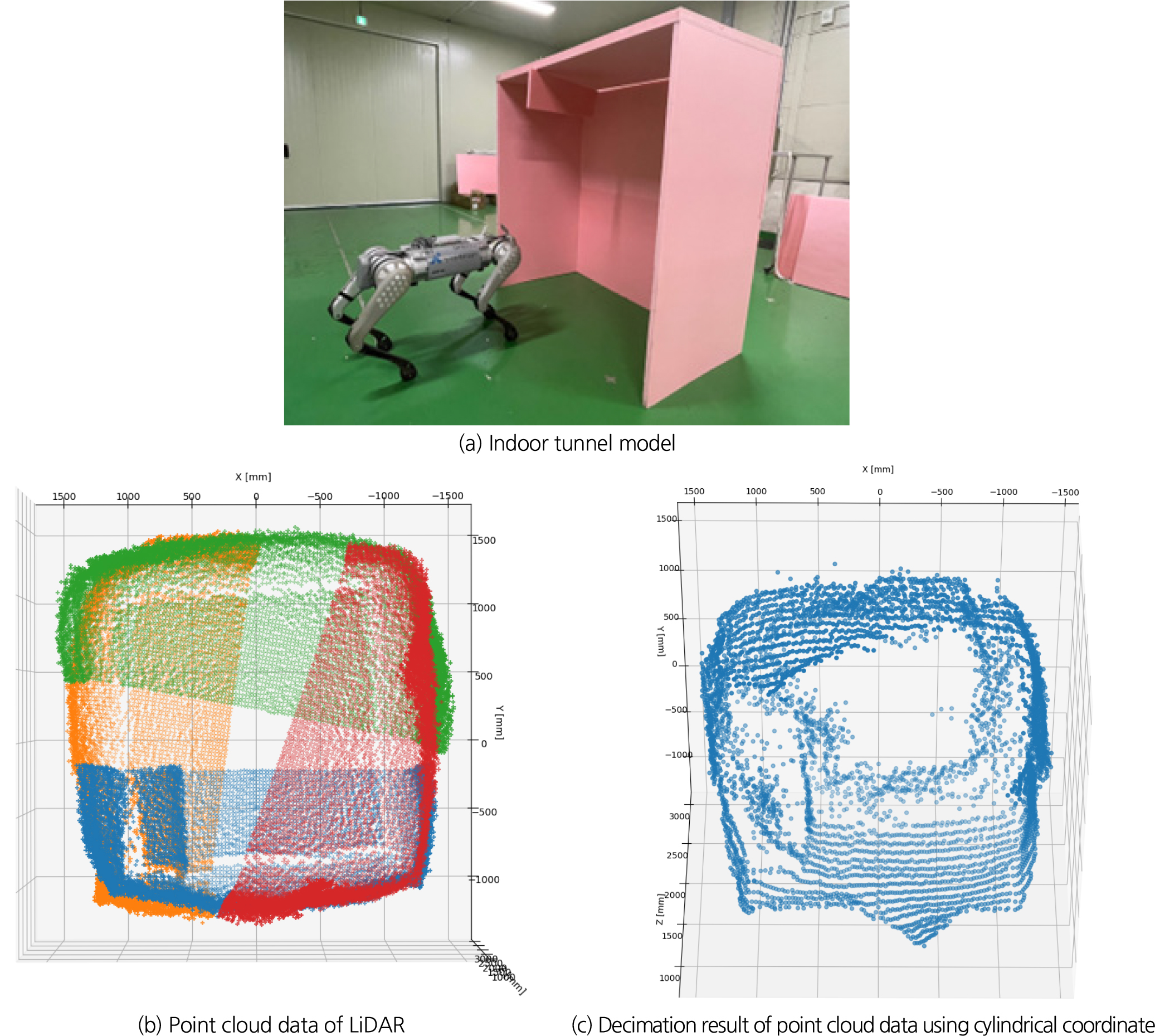
제작된 HPS-3D160 기반 형상화 장비를 이용하여 실내 광산 갱도 모델에서 측정된 결과는 Fig. 7과 같다. 스티로폼을 이용하여 Fig. 7(a)와 같이 2.0 m(H) × 2.0 m(W) × 1.0 m(D) 박스 형태로 제작하였다. Fig. 2(a)에 언급한 바와 같이 형상화 장치 내부의 모터를 0도에서부터 90도 간격으로 4회에 걸쳐 측정된 데이터를 Fig. 7(b)에 도식화하였다. 각도별로 측정된 데이터들은 각각 다른 색상으로 표현하였으며, 결과에서 볼 수 있듯이 많은 측정점들이 서로 겹쳐 있는 것을 확인 할 수 있다. 라이다의 특성상 모서리 부분이 둥글게 처리되어 있으며, 실제 크기보다 재구성된 데이터는 2.2 m(H) × 2.3 m(W) × 1.2 m(D) 크기를 갖고 있어, 약 10 % 크게 재구성되는 것을 알 수 있다. 총 데이터 개수는 160 × 60 × 4로 38,400개로 구성되어 있다. 많은 점들이 중첩되어 있기 때문에, 중첩되는 점을 하나의 점으로 대표화 하고 단면 형상을 정규화하는 방법이 필요하다. 이를 위해 로봇이 진행하는 방향을 축으로 하는 원통좌표계를 도입하여 모든 점들을 각도와 깊이 방향으로 정렬한다. 예를 들어, 10 cm 깊이 방향마다 1도 간격으로 점들을 재구성하여 360 × 12로 4,320개로 표현한 형상을 Fig. 2(c)에 나타내었다. 로봇이 전진하면서 진행방향을 기준으로 Fig. 2(c)와 같이 띠 형태로 데이터 정리하면, 수 km의 갱도 형상을 적은 데이터 수로 재구성할 수 있다. 또한 이 점들이 각도와 진행거리별 정렬이 되어 있어 면 정보을 재구성하는 데 매우 용이하다.
3.2 광산 갱도 형상화
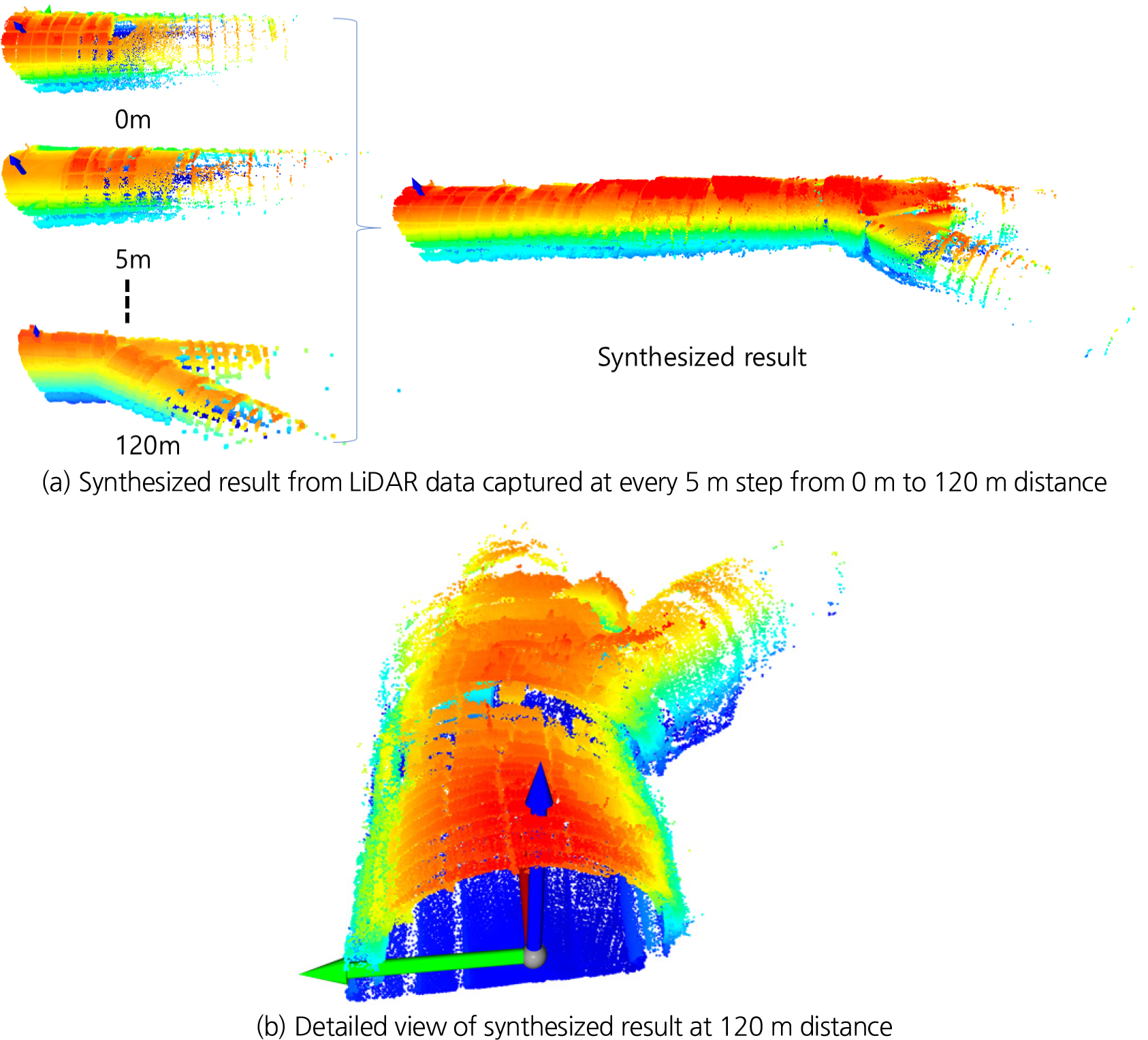
Fig. 8(a)와 같이 구성된 무인 이동체를 태백광산 장성갱도에 투입하여 3D 스캐닝을 하였다. HPS-3D160 라이다와 L1 라이다가 번갈아 가며 측정할 수 있도록 무인 이동체의 선단에 함께 장착하였다. 또한, Fig. 8(b)와 같이 3 km 광케이블 릴을 장착하여 원격제어 PC로 로봇을 120 m 이동시키면서 라이다 데이터를 5 m 간격으로 취득하였다. Fig. 9(a)은 0 m 지점에서 시작하여 120 m까지 5 m 간격으로 취득된 데이터를 합성하여 갱도의 모습을 재구성한 결과를 나타낸 것이다. Fig. 9(b)는 120 m 지점에는 갱도가 분기되는 곳의 형상을 자세히 볼 수 있도록 나타낸 것이다.
4. 결 론
고속 라이다, 카메라, 관성센서와 로봇 PC가 내장된 무인 이동체 탑재형 3차원 형상화 장비를 구현하였다. 이 장비는 2차원 배열 형식으로 거리 값을 측정하는 고정형 라이다와 고속 회전을 통해 짧은 시간에 많은 측정점을 획득할 수 있는 회전형 라이다를 장착 하여 형상화 장비를 제작하였다. 형상화 장비를 탑재 하여 갱도 내부로 진입하기 위한 무인 이동체로는 광산 내부의 슬러지와 갱도 내 유출 지하수 상황을 고려하여 방수 성능을 갖는 4족 보행 로봇을 사용 하였다. 조사의 안전성을 확보하기 위해, 터널 외부에서 원격 제어 PC와 로봇 PC와의 통신을 통해 이동을 제어하고, 측정 데이터를 수집하여 형상화 과정을 수행하였다.
광산 규모에 따라 무인 이동체가 조사 지역까지 진입해야 하는 거리가 수 백미터에서 수 킬로미터까지 다양 하므로, 원격 제어 PC와 무인 이동체 간의 안정적인 광대역의 통신 환경을 확보하는 것이 매우 중요하다. 본 논문에서는 광대역 네트워크 환경으로 무선 Wi-Fi와 광케이블을 이용한 유선 환경을 구축하여 비교하였다. 무선 통신환경의 적용 범위를 확인하기 위해 가시영역 상태에서 신호 강도를 조사한 결과, 250 m까지 통신이 가능하나 매우 연결이 불안정한 상태였으며, 안정적인 통신 가능 거리는 70 m로 확인되었다. 광대역 네트워크 환경의 보조 수단으로, 개방 지역에서 15 km까지 가능한 LoRa 통신 방식을 협대역 통신 환경으로 검토했지만, 갱도 내에서는 오히려 통신 가능 거리가 130 m로 제한되었다.
본 논문에서는 수 킬로미터까지 안정적인 통신환경을 확보하기 위해 0.25 mm 직경의 싱글모드 광케이블을 이용한 유선 통신방식을 채택하였다. 무인 이동체의 상부에 광케이블 릴을 설치하여 이동하면서 자연스럽게 케이블이 인출되도록 제작하였으며, 한 번 사용한 광케이블은 재활용할 수 없기 때문에 쉽게 광케이블 릴을 교체할 수 있도록 카트리지 형태로 제작하였다. 케이블 릴이 회전하면서 케이블이 꼬이지 않도록 광전변환기와 슬립링을 이용하여 꼬임 현상을 방지하였다. 하지만 이러한 싱글모드 광케이블을 곡선 구간이나 교차로 구간에 적용할 경우, 장애물에 걸려서 곡률 반경 이상으로 휘어지거나, 날카로운 가장자리와 접촉해 손상될 가능성이 높다. 다양한 광산환경에 적용하기 위해 케이블 릴에 모터를 회전시켜 로봇 이동 거리만큼 강제로 인출시키는 방식을 사용한다면, 로봇 이동에 방해를 주지 않게 운영할 수 있을 것으로 기대된다. 향후 이러한 유선 통신환경의 한계는 무선 이동 통신기술 발전과 유무선 하이브리드 방식 적용을 통해 극복할 수 있을 것으로 기대된다.
제작된 무인 이동체 탑재형 3차원 형상화 장비를 실내에서 모형 갱도에 적용하였다. 회전을 통해 얻어지는 중첩된 측정점 데이터를 갱도의 진행 방향에 맞춘 원통형 좌표계로 정렬하여 데이터 개수를 감소시켰다. 또한, 전진 이동함에 따라 일정 거리마다 정렬된 데이터를 누적해 가면서 전체 갱도를 재구성할 수 있도록 구현하였다. 태백에 있는 대한석탄공사 장성갱도에 장비를 투입하여 120 m 구간의 데이터를 취득하고, 광케이블을 통한 유선 통신 방식과 3D 스캐닝으로부터 갱도 형상 재현 방식의 적용 가능성을 확인하였다.
