

1. 서 론
2. 광산현장용 무인이동체
2.1. 육상환경을 위한 4족 보행 로봇
2.2. 항공환경을 위한 쿼드콥터 드론
2.3. 수중환경을 위한 수중드론
3. 폐광산 갱도 형상화 센서
3.1. TOF방식 solid-state 라이다(Lidar)
3.2 객체 센싱 및 형상화 장비 구축
3.3 객체형상화 기법
4. 현장 적용
5. 결 론
1. 서 론
무분별하게 개발된 후 오랫동안 방치된 폐광지역에서 발생하는 다양한 형태의 광산 재해는 Jeon and Jeon(2014)이 언급한 것처럼 사회적으로 큰 문제를 일으키고 있으며, 그중에서도 지반침하는 예측할 수 없는 사고의 형태로 흔히 발생하여 경제적 손실 및 인명피해를 유발한다는 측면에서 중요하게 다루어져야 한다. 그러나 폐광산의 도면이 존재하지 않거나 정보가 부족하기 때문에 갱도의 규모나 진행 방향을 파악하는 것이 우선 선행되어야 할 작업이다. 기존에 폐광의 위치와 규모를 파악하기 위해서는 Kim et al.(2021)이 수행하였듯이 지하공간을 관통하는 시추공을 굴설하고 시추공을 통해 레이저 거리 센서를 회전시켜 측정하는 3차원 형상화 장비를 투입 시켜 스캐닝 기술을 이용하여 광산의 형상을 재구성하는 방법이 주로 사용되었다. 그러나 일반적인 폐광 현장은 지하수가 채워진 경우가 많아 Kim et al.(2020a)의 특허처럼 수중에서 거리 측정이 가능한 소나 센서도 선택해서 운용할 수 있도록 제작되었다. 시추공으로 투입된 장비가 제한된 동작범위 내에서 효과적으로 3차원 공간을 재구성하기 위하여 모터를 이용하여 거리 측정 센서의 회전운동과 관절운동을 통해 여러 각도에서 측정점을 얻도록 제작되었다. 하지만, 이러한 장비를 이용하여 공동의 형상을 재구성하기 위한 측정점들을 모으는 데 많은 시간이 소요된다. 이러한 단점을 보완하기 위해서 Kim et al.(2020b)은 360도 고속 회전을 통해 단면의 형상을 획득할 수 있는 라이다 장비가 활용되어 입구가 넓고 측정 구간이 긴 수직갱도나 대규모 싱크홀 재난 현장 등에 활용할 수 있도록 제작되었다. 자율 주행 기술이 발전함에 따라 라이다 측정 기술도 급속도로 발전하여, 한 번 회전에 한 단면만 측정할 수 있는 단채널 라이다에서 16개 이상의 단면을 동시에 측정할 수 있는 다채널 라이다가 출시함에 따라, Kim et al.(2022)는 규모가 큰 광산 현장에 다중채널 라이다를 적용하여, 측정시간과 정밀도를 향상시킬 수 있는 방법이 제안되었다. 이와 같이 관통 시추공을 통해 고정밀의 광산 형상을 재구성할 수 있지만, 시추를 통해 장비를 투입해야 하는데 관통시추공을 확보하는데 많은 비용이 소요되기 때문에 Kim and Kim(2010)은 시추공 레이더를 활용하여 비록 관통하지 않더라도 주변을 지나는 시추공을 활용하여 지하 공간의 위치와 공간을 측정할 수 있는 기술도 활용되고 있으며 심지어는 Hong et al.(2022)은 지상에서 운용되는 다채널 지하투과레이더(Ground-Penetrating Radar, GPR)에서 획득된 레이더 영상을 통해 지하공간의 위치와 크기를 측정 할 수 있는 기술도 활용되고 있다.
최근 무인 자율 주행 기술이 발전함에 따라, 시각 및 여러 센서로부터 획득된 정보에서 객체를 감지하고 인식하여 차량의 이동 경로를 계획하고, 차량을 구동하여 움직이는 기술이 발전하고 있다. Kim and Choi(2019)와 Singh et al.(2023)은 이러한 자율 주행 기술과 객체 인식 기술을 폐광산 갱도 조사에 활용한 사례를 조사한 바 있다. 방치되었던 폐광산 현장에 투입하여 3차원 형상화를 수행하기 위해서는, 광산의 형상을 획득할 수 있는 고속 라이다 센서가 필요하고 이러한 고속 라이다 센서를 부착하여 폐광산 내부로 진입하기 위한 무인 이동체가 동반되어야 한다. Neumann et al.(2014), Tatsch et al.(2023)과 Ghosh et al.(2017)은 4륜 이동체를 이용하여 광산환경에서 자율 주행을 통해 광산 형상을 맵핑한 결과를 보여주고 있다. 가행 광산에서는 위치 인식을 위한 마커나 통신 장치를 이용하여 현 위치를 결정할 수 있고 주행 경로를 결정 할 수 있지만, 폐광 현장에서는 고속 라이다 센서로부터 획득된 정보를 통해 광산 형상을 실시간으로 3차원 형상으로 재구성하면서 현재 위치를 파악하고 진행 방향을 결정해야 하므로, Durrant-Whyte and Bailey(2006)가 제안하는 SLAM (Simultaneous Localization and Mapping) 기술이 적용되어야 한다. 이러한 기술을 바탕으로, Singh et al.(2021)와 Fekete et al.(2010)은 광산 현장에서 고속 라이다에서 얻어지는 많은 수의 측정점 분포 분석을 통해 광산 구조물의 안전성을 조사하는데 활용하였고, Zlot and Bosse(2013)은 측정점으로부터 추출된 면정보를 효과적으로 추출하여 광산현장에 적용된 사례를 보여주고 있다.
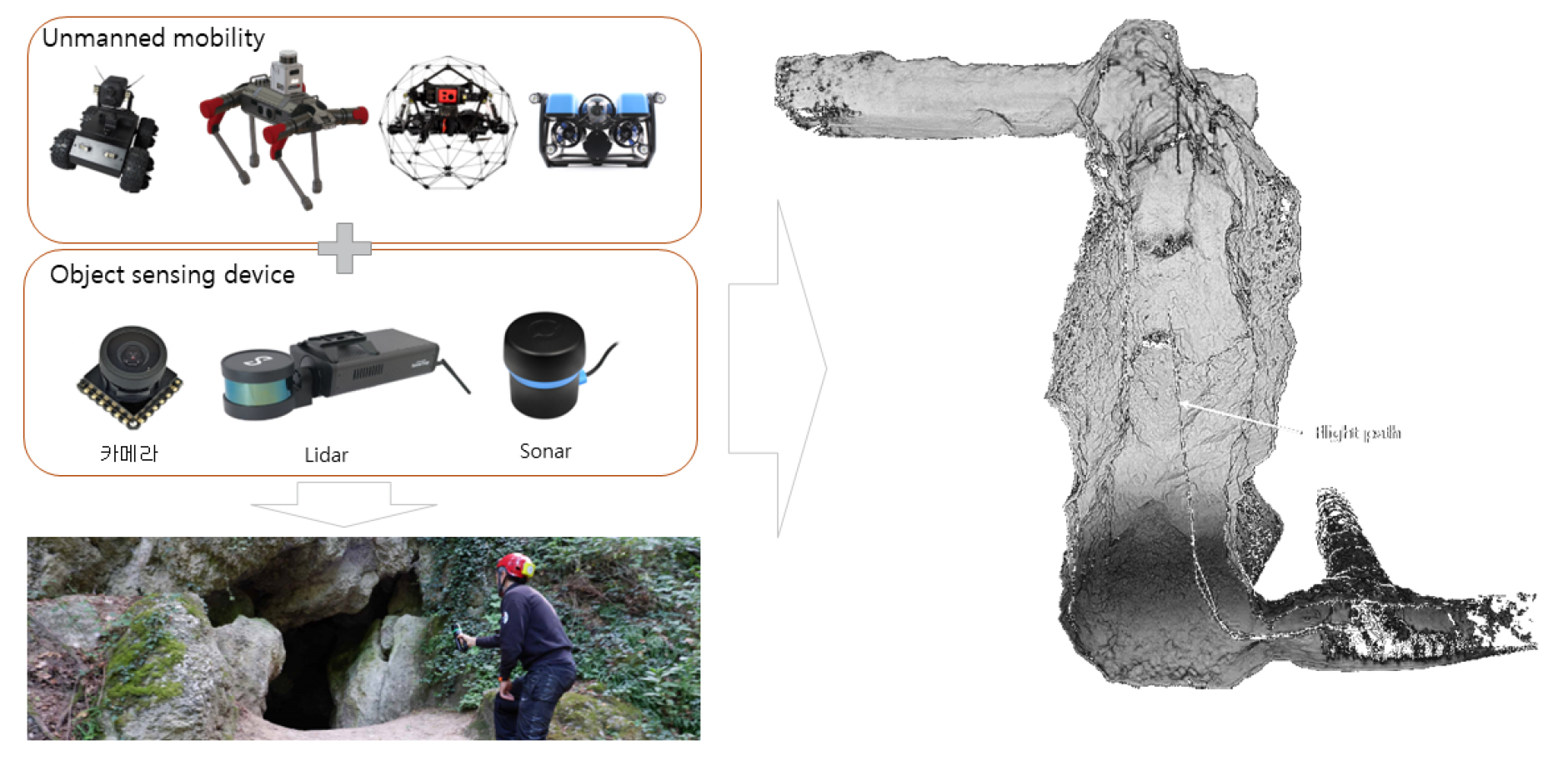
본 논문에서는 Fig. 1과 같이 폐광 입구를 통해 육상, 항공 및 수중 무인 이동체에 영상 및 고속 거리 측정 센서를 장착하여 폐광산 갱도를 실측하고 형상화할 수 있는 기술을 구현하기 위하여 고려할 사항에 논하고자 한다, 우선 무인 이동체 선정할 때 다양한 광산의 환경 조건을 반영하여 적용 가능한 기술에 대해 설명 하고, 객체 인식 센서로서 최근 각광 받고 있는 solid-state 라이다 기술에 대해 설명하였다. 마지막으로 무인 이동체에 부착된 라이다 센서를 이용하여 지하공간을 형상화하는 기법에 대해 설명하였다.
2. 광산현장용 무인이동체
2.1. 육상환경을 위한 4족 보행 로봇
폐광산 현장은 오랫동안 방치되어 있어 지하수가 원활하게 배수되지 못하여 갱도가 슬러지 상태인 경우가 많으며, 아울러 천정과 벽면에서 지하수가 흘러내려 지하수가 고여 있는 경우가 많다. 특히 인력이 투입된 적이 없기 때문에 광산 작업시 설치했던 구조물들이나 장애물이 방치 되어 있는 경우가 많다. 이러한 작업환경 때문에 4륜형 이동체나 궤도형 이동체는 전복 위험이 높아 투입이 제한된다. 이처럼 불규칙한 장애물이 많은 환경에서는 보행을 통해 이동할 수 있는 4족 보행 로봇이 유리하다. Table 1에 현재 운용되고 있는 대표적인 4족 보행 로봇의 사양을 비교하였다. Boston dynamics사의 SPOT로봇은 가장 진보된 로봇으로서 산업현장이나 공공 시설 등에 가장 많이 활용되고 있다. 자율 주행 성능이 우수하여 보행자와 같이 움직이는 장애물 회피 성능과 중심회복 능력이 우수하고 조작이 용이하여 초보자도 쉽게 이용할 수 있다. 그러나 방수방진등급이 IP54로서 생활방수만 지원되어 지하수와 슬러지 상태인 갱도 환경에서 운영하기에는 부적합하다. 특히 보행자들이 많은 곳에서 운용하기 위해 적용된 장애물 회피 기능과 중심회복 능력은 보행자가 없는 폐광산 현장에서는 무의미하며 슬러지에서 보행시 슬립 현상이 발생할 경우 진행을 어렵게 만드는 방해요소가 된다. Ghost Robotics사의 Vision 60모델은 군용으로 개발되어 방수등급이 IP67 등급으로서 우수하고 험지환경에서 주행 및 등판에 최적화된 모델이다. 하지만 가격이 너무 고가여서 폐광산 현장에 적용하기에는 부적합하다. 마지막으로 Unitree사의 B1모델은 가장 저가형 모델로서 보행자 회피 기능이나 중심회복 능력은 부족하나 방수방진등급이 IP68등급으로서 수중에서도 운용할 수 있어 지하수가 흐르고 슬러지가 많은 폐광산 현장에서 운용이 가능하며 작업후 유지관리에도 매우 용이하다.
Table 1.
Comparison of quadruped robots



문경에 있는 폐광산지역에서 SPOT 모델과 B1을 투입하여 진입성능을 비교하였다. Fig. 2(a) 와 (b)에 나타낸 바와 같이 두모델 모두 18.7°의 경사도를 갖는 경사로를 등판하는 데에는 우수한 성능을 보여 주었다. 하지만 슬러지 상태의 갱도 내부 진입성능에서는 Fig. 2(c)의 SPOT은 슬러지에서 슬립 현상 발생시 중심회복 능력 때문에 전진할 수 없었지만, Fig. 2(d)의 B1도 역시 슬러지에서 주행이 어려웠으나 방수 특성 때문에 지하수가 배수되는 수로의 딱딱한 바닥을 따라 진입할 수 있었다.

2.2. 항공환경을 위한 쿼드콥터 드론
일반적인 폐광 갱도의 폭과 높이는 1.5 m 이상이라고 가정할 때 운용 가능한 쿼드콥터 드론을 Table 2에 나타내었다. DJI사의 Matrice M300모델은 산업현장에서 가장 많이 활용되는 드론으로서 운항 시간이 40분 이상으로 길고 최대 비행거리가 5 km이상으로 넓으며 고해상도 카메라와 여러 센서를 3대까지 장착할 수 있어 활용 범위가 넓다. 특히 영상센서와 관성센서를 활용한 호버링 기능이 우수하여 고해상도 영상 촬영이나 라이다 조사에 매우 적합하다. 하지만 날개를 펼쳤을 때 최대 넓이가 810 mm여서 갱도 환경에서 움직일 수 있는 범위가 좁고 순간 이동속도가 빨라 갱도 환경에서 충돌 위험이 매우 높다. 반면에, Flybility사의 Elios2모델은 갱도나 덕트 및 굴뚝 환경에서 활용하기 위해 원형 형태의 가드를 적용하여 특수하게 개발된 드론이다. 갱도내에서 비행하기에 매우 적합하지만 비행시간이 10분 정도로 너무 짧고 기 설치된 카메라외에 추가 센서를 부착할 수 없어 활용 범위가 매우 좁다.
Table 2.
Comparison of quadcopter drones

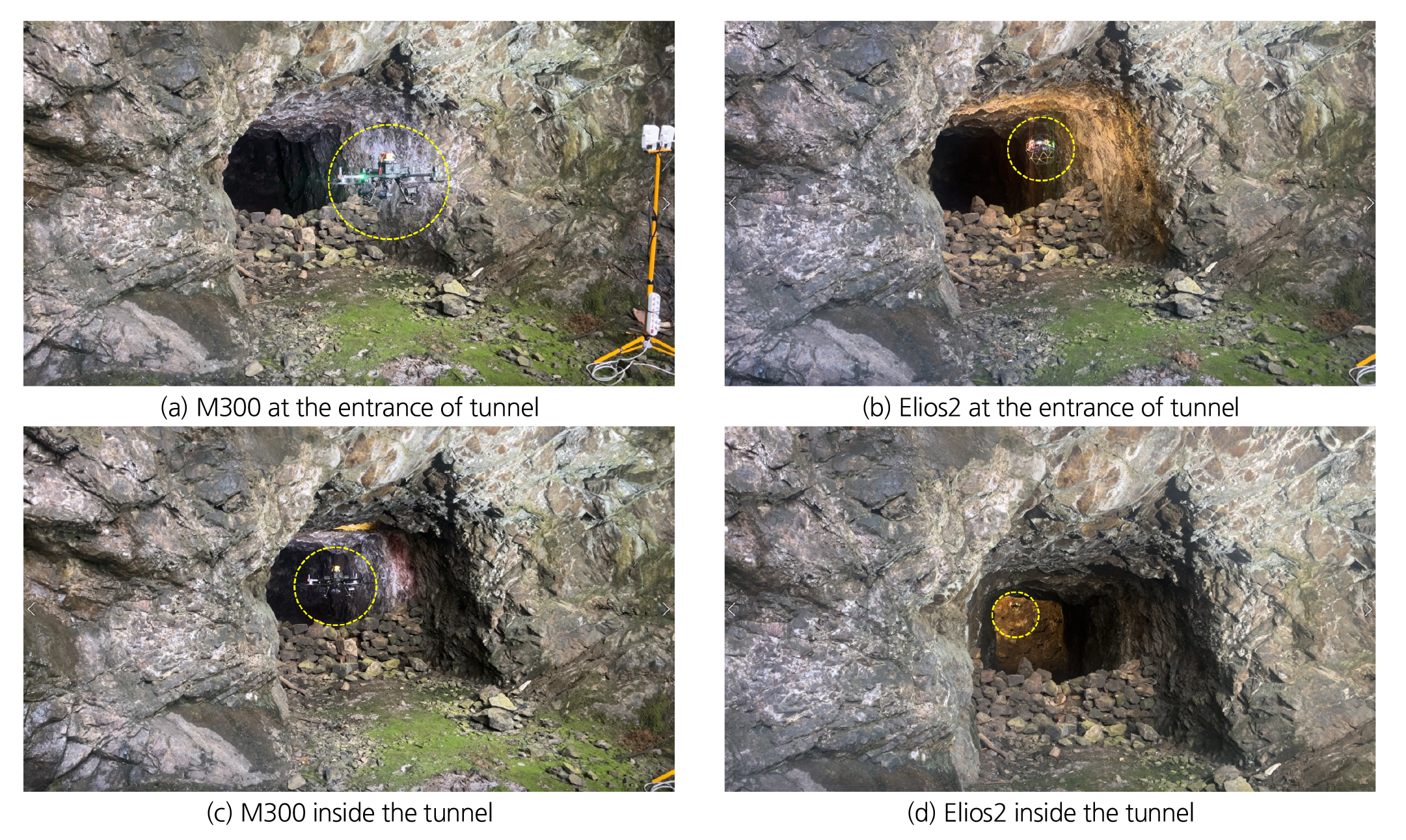
홍천에 있는 자운광산 갱도2에서 DJI사의 M300모델과 Flybility사 Elios2모델을 갱도 내로 투입 시키는 시험비행 결과를 Fig. 3에 나타내었다. Fig. 3(a)와 (b)는 두 모델이 넓이 1.5 m 높이 1 m인 입구 부분을 진입하는 장면을 나타내었다. Fig. 3(c)는 M300모델이 갱도 입구 부분을 진입하기 위해 노력하고 있으나 충돌 방지를 위한 안전 센서가 작동하여 진입이 불가능한 상태를 보여 주고 있다. 모든 안전 센서를 불능화하고 진입을 시도하였으나 너무 충돌위험이 커서 진입을 포기하였다. Fig. 3(d)는 Elios2모델이 갱도내부로 진입에 성공하여 갱도 내에서 영상촬영을 하고 있는 장면을 보여준다. Elios2 외부의 보호 가드가 충돌 시에도 기체를 보호하기 때문에 운용자는 용이하게 비행을 수행할 수 있었다.
2.3. 수중환경을 위한 수중드론
지하수에 수몰되거나 강 또는 바다 하구에 있는 폐광 현장을 조사하기 위해서는 카메라와 소나 센서가 장착된 수중드론(Remotely Operated Vehicle, ROV)이 일반적으로 사용된다. 수심 100 m마다 수압이 10기압씩 증가하기 때문에 깊은 심도를 조사하는 수중 드론은 내압 구조 때문에 크고 무거워 운용이 쉽지 않다. 하지만 200 m 이내에서 운용되는 수중 드론은 프라스틱 재질로도 압력을 견딜 수 있어 소형 드론 제작이 가능하다. Table 3에 가장 보편적으로 활용되는 Chasing사의 소형 수중 드론 M2 Pro 모델과 Blue Robotics사의 중형 수중 드론 BlueROV2 모델을 비교하였다. M2 Pro 모델은 소형크기와 경량 때문에 수중 촬영용으로 많이 활용되고 있다. 하지만 이 모델은 다른 소나 센서를 부착할 수 없기때문에 확장성이 매우 낮다. 반면에 BlueROV2모델은 1.2 kg 까지 추가 센서를 부착할 수 있어 소나를 장착하며 운행할 수 있어 조명이 없는 깊은 심도나 부유물이 많은 갱도 환경에서 소나 영상을 활용할 수 있어 매우 유용하다.
Table 3.
Comparison of underwater drones


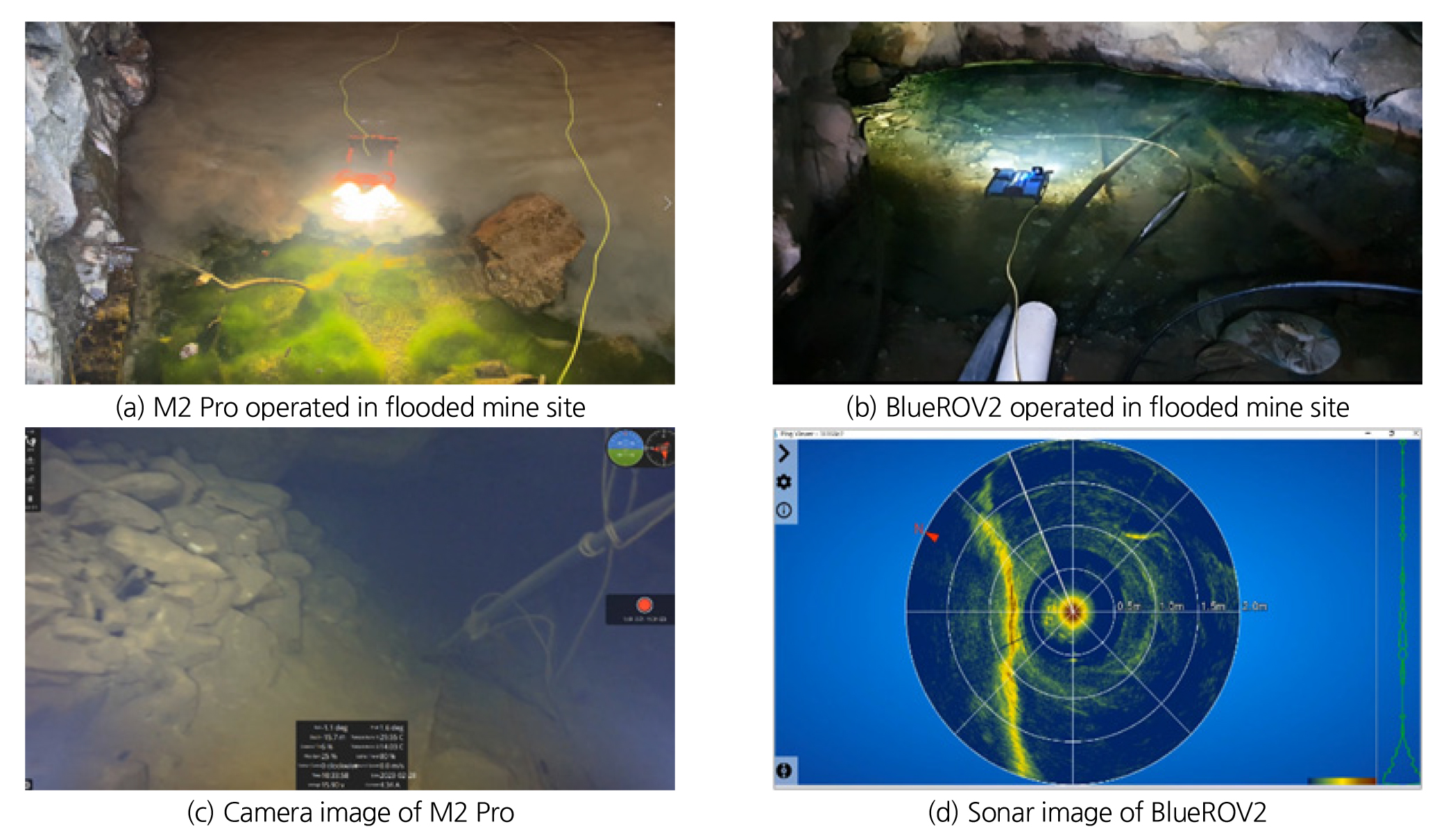
홍천에 있는 자운광산 갱도1에서 M2 Pro모델과 BlueROV2모델을 시험 운행한 결과를 Fig. 4에 나타내었다. Fig. 4(a)와 (b)는 각각 두 모델 이 심도 2 m인 갱도 내에서 운영되고 있는 모습이다. Fig. 4(c)는 M2 Pro모델의 카메라 영상을 보여 주는 화면으로 바닥 근처로 항해할 때 부유물 때문에 전방 시야가 가려지는 것을 보여 준다. 반면에, Fig. 4(d)와 같이 BlueROV2모델은 카메라 영상 이외에 소나 영상을 실시간으로 보여 주기 때문에 조명이 없는 환경에서도 운영할 수 있다. 갱도내에서 활용하기 위해서는 소나가 장착된 BlueROV2모델이 적합함을 알 수 있다. 하지만 현재 적용된 소나 센서는 수평으로 장착되어 있어 운행시 장애물 감지에는 적합하나 수중 갱도를 영상화 하기에는 부적합하다. 그러므로 다중채널 라이다처럼 좁은 소나 빔패턴을 이용하여 고속 회전을 통해 여러 측정점의 거리를 측정할 수 있는 소나 프로파일러를 추가로 장착해야 하는데 BlueROV2는 Payload를 1 kg까지 장착할 수 있고 확장성이 우수하여 광산 갱도 형상화에 적합하다.
3. 폐광산 갱도 형상화 센서
3.1. TOF방식 solid-state 라이다(Lidar)
기존 고속 라이다 센서는 레이저 광원을 고속 회전시켜 영상을 획득하는 회전형 라이다가 많이 활용되고 있다. 이러한 라이다는 광학 프리즘을 회전시켜 측정되기 때문에 내구성이 취약하고 방수 방진 성능이 우수하지 못하다. 그러나 최근 레이저 광원의 왕복 거리 시간(Time-of-flight, TOF)를 기존 CCD 센서처럼 측정할 수 있는 기술이 발전함에 따라 카메라 영상처럼 방사각(Field of View, FOV) 범위의 2차원 영상의 거리 정보를 고속으로 측정할 수 있다. 이러한 TOF 방식은 기존 광학 방식보다 정밀도는 낮지만, 저가이면서 고속으로 2차원 면에 대한 거리 측정값을 획득할 수 있기 때문에 자율주행 기술에 많이 활용고 있다. 본 논문에서는 Table 4와 같이 3종 solid-state 라이다를 비교하였다. 저가형 모델로서 Hypersen Tech사의 HPS-3D160모델은 소형의 크기를 갖고 있으면서, 수평 방사각(Horizontal FOV, HFOV)와 수직 방사각(Vertical FOV, VFOV)가 76°×32°의 범위를 160×60 pixel로 초당 35장씩 거리 측정이 가능하다. Unitree사의 L1모델은 90° FOV를 갖는 solid-state 라이다를 360도로 회전시키면서 초당 1.5×106개의 점들을 360°×90° 범위로 측정이 가능하다. 마지막으로 고가형 모델로서 SICK사의 Visionart-T Mini모델은 소형크기를 갖고 있으면서 70°×60°의 범위를 512×424 pixel로 초당 30장씩 매우 정확한 거리 측정이 가능하다.
Table 4.
Comparison of lidar


3.2 객체 센싱 및 형상화 장비 구축
긴 원통형 구조의 광산 갱도에서 solid-state 라이다를 무인 이동체에 전면으로 고정 배치하여 운영하면 장애물 감지 용도로는 사용할 수 있지만, 화각이 좁아 갱도 벽면 형상화 용도로는 사용이 어렵다. 하나의 solid-state 라이다 센서를 이용하여 동시에 장애물 감지와 벽면 형상화를 구현하기 위해 Fig. 5와 같이 일정한 각도로 경사각을 주어 설치한 후 회전하면서 측정하도록 구성하였다. Fig. 5(a)는 4족 보행 로봇에 장착된 형태이고, (b)는 항공 드론에 장착된 형태이다.
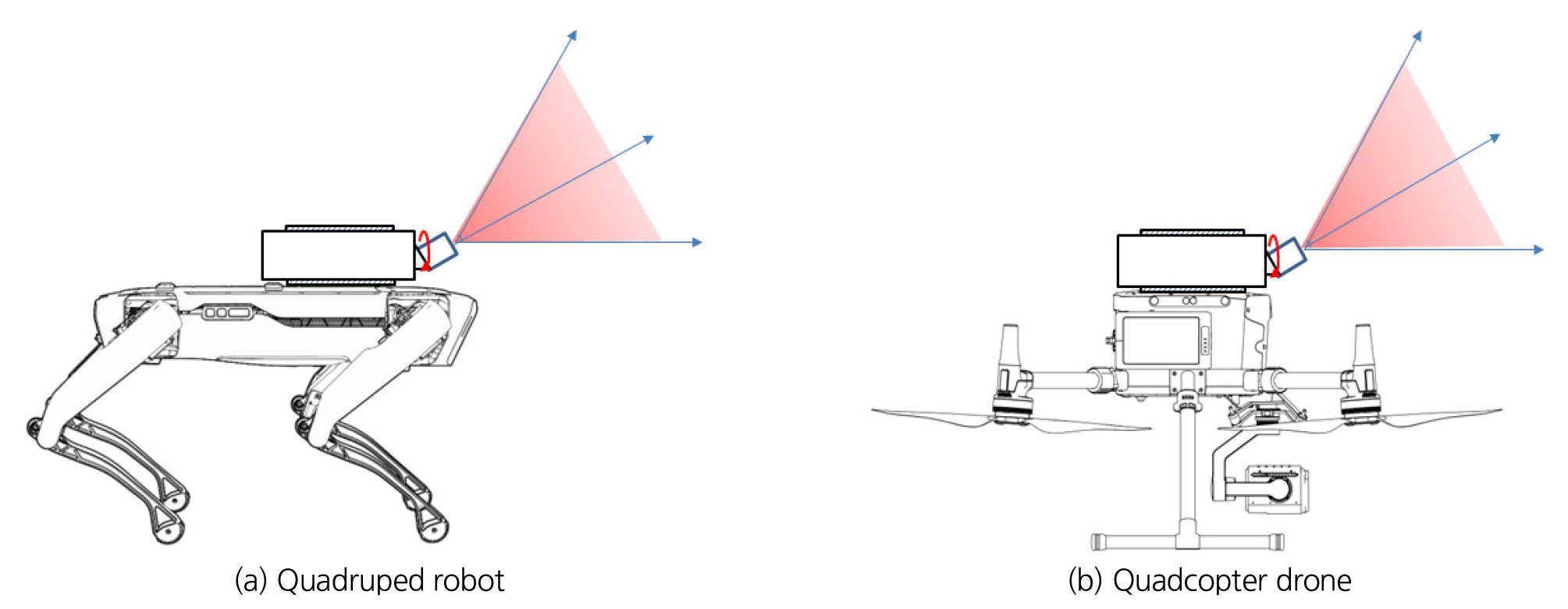
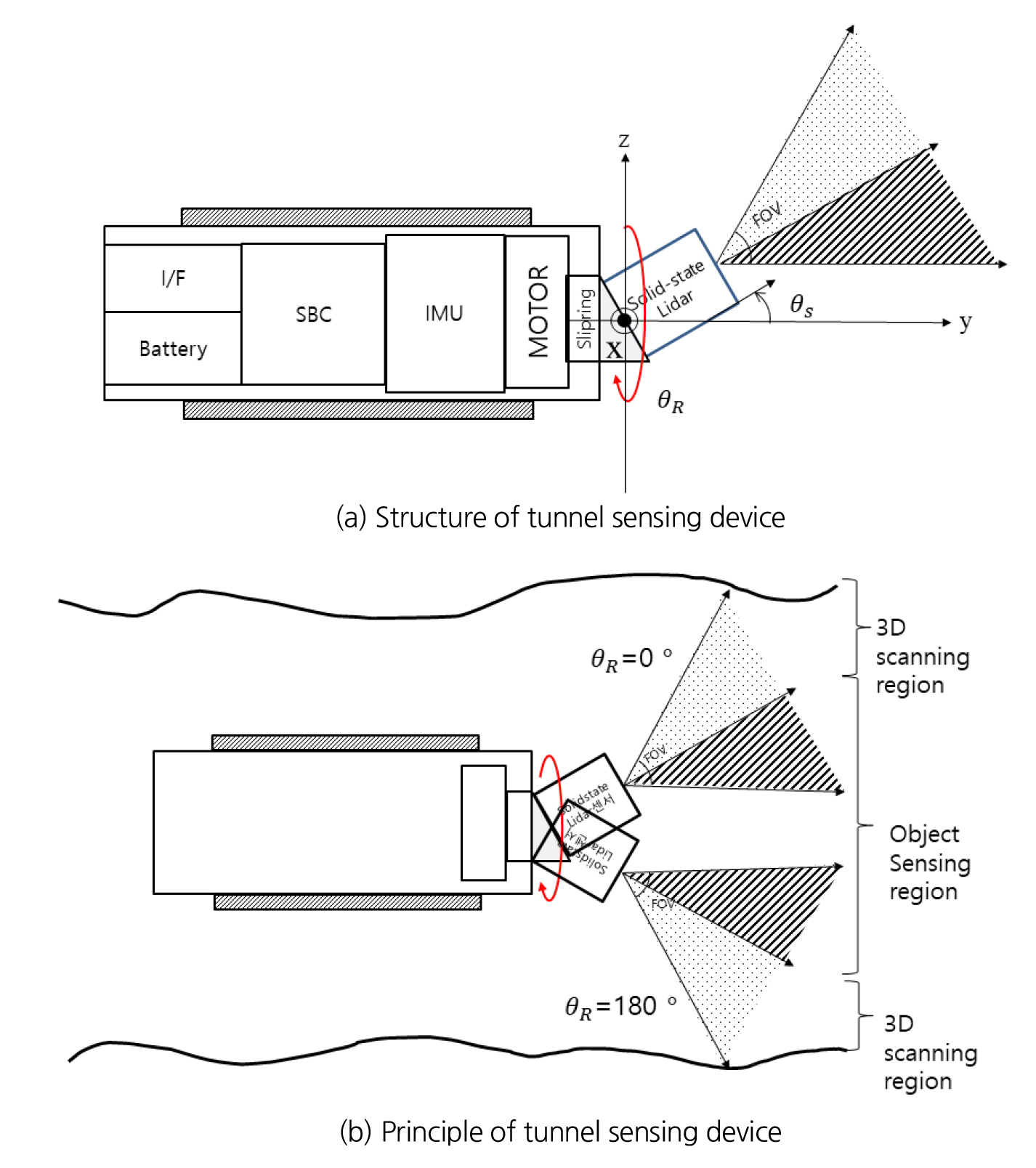
Fig. 6은 solid-state를 이용하여 제작된 폐광산 갱도 형상화 장비의 구조와 동작 원리를 나타내었다. Fig. 6(a)에서 볼 수 있듯이 전원공급을 위한 배터리가 장착되어 있으며, 통신을 위한 인터페이스(I/F)를 통해 시스템을 통제하는 컴퓨터(Single board computer, SBC)에 명령어가 전달되고, 명령어에 따라 모터가 구동하여 solid-state 라이다를 회전시키게 된다. 이때, 방사각을 갖는 solid-state 라이다를 Fig. 6(a)처럼 경사각(θs)를 FOV/2 만큼 경사지게 고정하여 y축을 중심으로 회전각(θr)만큼 회전시키면서 측정하면, Fig. 6(b)와 같이 방사각중 바깥쪽 절반 영역은 벽면 형상을 형상화하기 위하여 활용되고 회전 중심쪽 나머지 반쪽 영역은 무인 이동체 진행 방향을 보기 때문에 장애물 감지용으로 활용할 수 있다.
3.3 객체형상화 기법
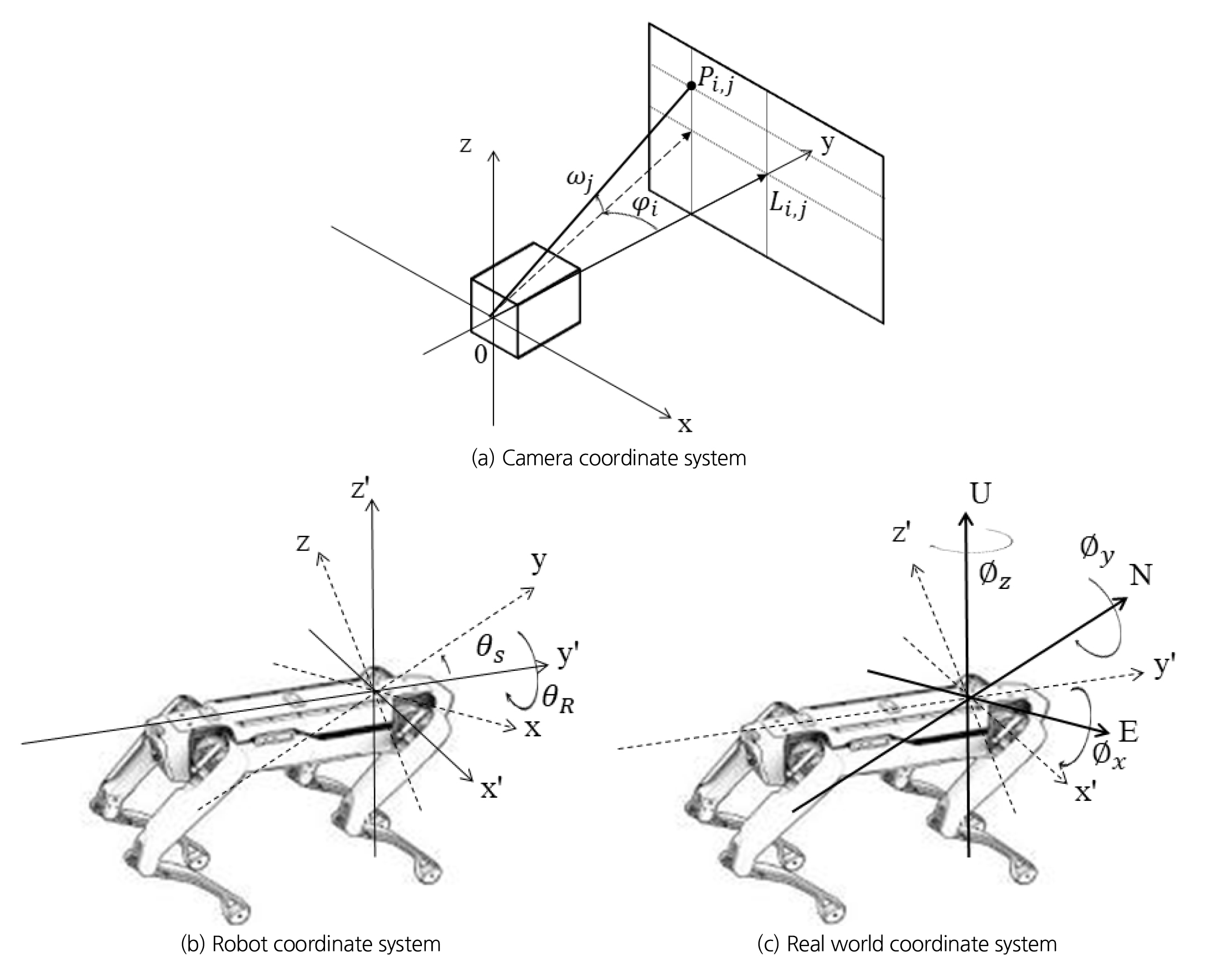
3.2 절에서 라이다 센서가 회전하면서 측정된 점들로부터 갱도의 형상을 재구성하기 위한 객체 형상화 기법은 다음과 같다. Solid-state 라이다는 Fig. 7(a)처럼 라이다 센서의 중심부로 방사형 형태로 레이저가 방사되고, 반사되어 온 시간을 통해 거리가 측정되는 상황을 가정할 경우, (i,j)번째 픽셀의 측정점은 고유의 수평 방사각 ψi와 수직 방사각 ωj를 갖게 된다. 이때, 측정 거리를 Li,j라고 하면 Garcia-Gomez et al.(2020)이 제안한 방법을 이용하여 실제 측정점 Pi,j는 식 (1)을 통해 구할 수 있다.
이렇게 측정된 Pi,j점은 센서의 경사각 θS와 회전각 θR을 고려하여 회전 변환을 이용하여 식 (2)를 이용하여 Qi,j를 계산할 수 있다.
이동체가 보행하거나 비행하면서 조정되는 롤(Roll), 피치(Pitch), 요(Yaw)자세를 나타내는 Øx,Øy,Øz를 관성센서(Inertial measuring unit, IMU)로부터 측정하여 식 (3)을 통해 현실세계 좌표 Ri,j로 변환이 가능하다.
로봇으로부터 제공되는 로봇 자세 좌표는 자북을 중심으로 하는 ENU (East-North-Up)좌표계를 제공하기 때문에 최종 결정된 Ri,j는 자북을 중심으로 하는 절대 좌표계이다. 이렇게 구성된 공간 좌표들을 수집하여 point cloud를 구성하고 point들을 연결하여 면 정보를 추출하여 벽면을 재구성해야 진행 방향을 결정할 수 있다.
4. 현장 적용
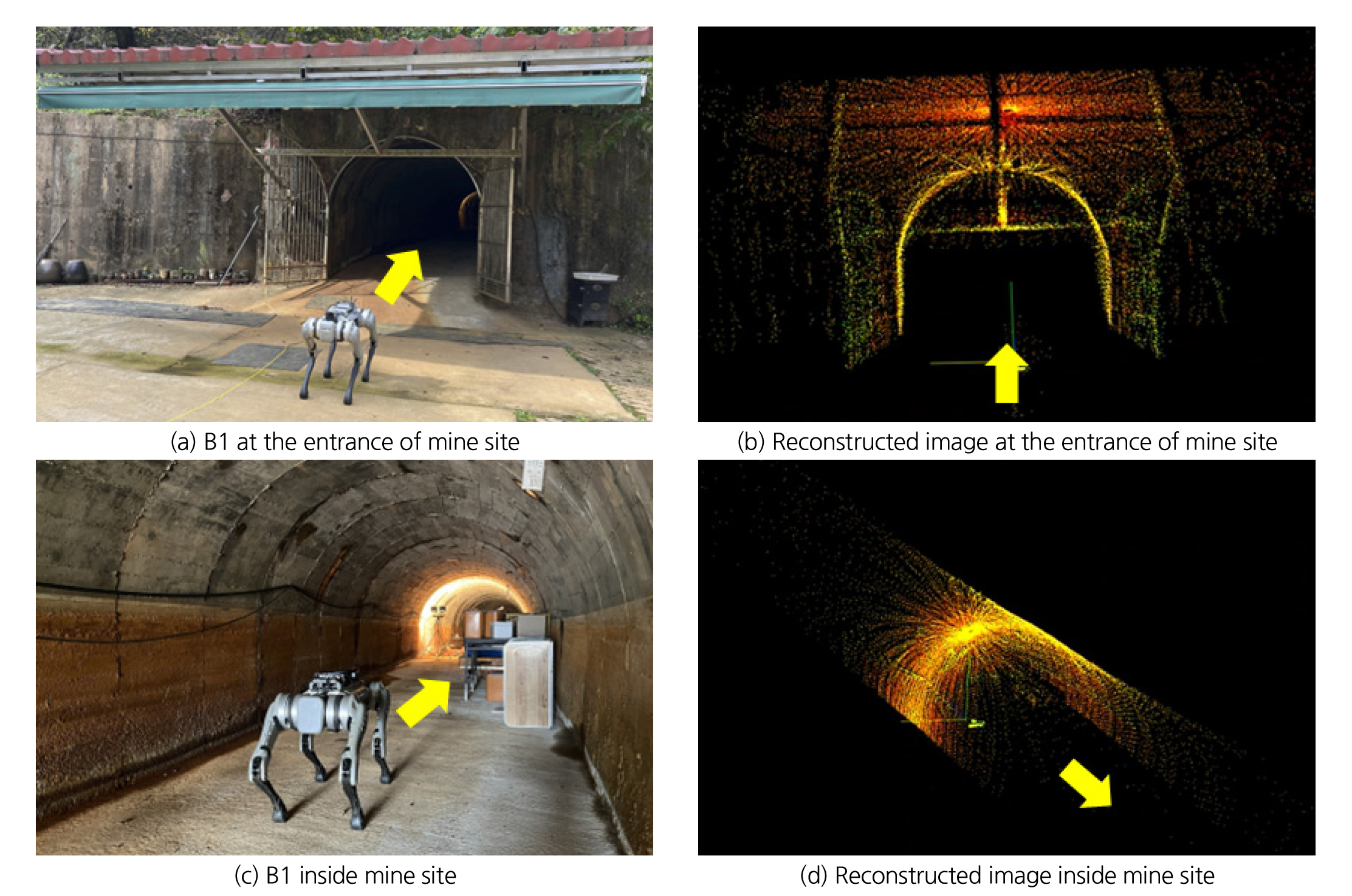
구현된 객체 형상화 센서를 Fig. 8과 같이 4족 보행 로봇에 장착하였다. 방사각이 가장 넓은 Unitree사의 L1 라이다를 4족 보행 로봇의 머리 부분에 장착하였으며, 데이터 수집 및 통신을 위한 PC를 등 부분에 장착하였다. 4족 보행 로봇 내부에 장착된 관성센서로부터 제공되는 자세 정보와 이동정보를 활용하여 데이터 재구성에 활용하였다. Fig. 9는 문경에 있는 폐광에 투입한 결과를 보여 준다. Fig. 9(a)는 4족 보행 로봇이 갱도 입구 부분에서 측정을 시작하는 상황을 나타내고 있으며, (b)는 라이다로 측정된 결과를 보여 준다. Fig. 9(c)와 (d)는 갱도 중심 부분에서 라이다 센서로 측정하는 장면과 측정 결과를 보여 주고 있다.

5. 결 론
무인 이동체를 폐광 현장에서 운용하기 위해서는 다른 산업현장에서 요구되는 사항들이 불필요하거나 오히려 방해 요소가 된다. 육상환경에서 활용한 4족 보행 로봇 경우 핵심 기능인 장애물 회피 기능과 중심 복원 기능이 오히려 폐광산의 갱도를 이동할 때에는 불필요하거나 전진을 방해하는 요소로 작용함을 현장 적용을 통해서 보여 주었다. 오히려 방수성능이 확보된 로봇을 활용하여 지하수 배수로를 이용하여 전진할 수 있다는 것을 확인하였다. 항공 쿼드콥터 드론 경우 센서를 추가 장착할 수 있는 산업용 드론은 크기 때문에 광산 현장에 적용하기 힘들었으며 좁은 공간에서 활용할 수 있는 험지용 드론은 운용 시간과 페이로드 때문에 적용하기 어려운 점이 있다. 아울러 갱도 내에서는 고도가 1 m 정도만 유지되면 되기 때문에 일반 항공 드론에서 요구되는 높은 고도까지 올라가기 위한 추력은 불필요하다. 오히려 부피를 줄이면서 추력을 높일 수 있는 이중 로터 드론 형태가 적합할 것으로 기대된다. 아울러 쿼드콥터 드론이 수평 이동할 때 동체가 기울어지면서 이동하게 되는데, 이때 상부에 장착된 라이다의 각도가 변하게 되어 측정 오차를 만들고 순간 이동속도도 증가하기 때문에 전/후진용 추가 로터를 부착하여 수평 상태를 유지하면서 이동할 수 있는 구조가 필요할 것으로 기대된다. 수중 드론 경우 소나를 상부에 장착하여 장애물 탐지용으로 사용하고 있으나 공동의 형상을 재구성하기에는 부적합하여 추가로 다중채널 프로파일 소나 장비가 전방에 장착되어야 갱도의 형상을 재구성할 수 있을 것으로 기대된다.
마지막으로 TOF 측정방식의 solid-state 라이다를 무인 이동체에 탑재하여 폐광산 갱도의 형상을 재구성할 수 있는 시스템이 제안되었다. Solid-state 라이다의 방사 특성을 고려하여 경사각을 두어 벽면 형상을 위한 영역과 장애물 감지를 영역으로 나누어 운영할 수 있도록 하였다. 2차원 픽셀 단위로 측정되는 점들로부터 라이다의 방사 특성을 고려하여 반사 점을 계산하고 센서의 경사각과 회전각을 반영하여 로봇 중심의 좌표계로 변환한 후 로봇의 자세와 이동량을 반영하여 실제 좌표계로 변환할 수 있는 계산 방법을 제안하였다. 이렇게 획득된 데이터를 바탕으로 갱도의 형상 정보와 진행 방향 결정을 위한 공간정보 및 회귀를 위한 경로 설정에 활용하기 위한 포인트 클라우드를 수집할 수 있도록 구현하였다. 현장에 적용하기 위해서는 로봇 제어 명령과 결합된 자동 회귀 기법이 적용되어야 하며 갱도 내에서 제한되는 무선 환경을 극복하기 위한 무선 연결 확장 방법이나 유선 운영 방법등이 적용되어야 한다.
