

1. 서 론
2. 국외 공곡 측정 사례
2.1 핀란드 고준위방사성폐기물 부지조사의 공곡 측정 사례
2.2 스웨덴 고준위방사성폐기물 부지조사의 공곡 측정 사례
3. 고준위방사성폐기물 부지연구 관련 국내 공곡 측정 사례
3.1 국내 공곡 측정 사례
3.2 고준위방사성폐기물 부지연구에 적용된 공곡 측정 장비와 원리
3.3 국내 고준위방사성폐기물 부지연구 관련 심부 시추와 공곡 측정 사례
4. 공곡 발생 원인 분석과 공곡도 확보 방안
4.1 목표 대비 초과 공곡 발생 현황 및 원인 분석
4.2 시추공 공곡 향상 방안
5. 결 언
1. 서 론
2025년 3월 25일에 제정된 고준위방사성폐기물 특별법에 따르면 관리시설의 부지선정을 위해 단계적 방식을 택하고 있으며, 고준위방사성폐기물 관리 위원회 주관으로 부지적합성 조사 계획을 수립하고 기본조사와 심층조사 등이 이루어질 예정이다. 부지적합성 조사 또는 부지선정절차 이전에 수행된 연구를 통상 부지연구(또는 예비조사, site study, Cheon et al., 2024a) 등으로 명명할 수 있다.
한국지질자원연구원은 고준위방사성폐기물 부지연구의 일환으로 국내를 4개의 지체구조와 암종으로 구분하여 심부 시추를 수행하였다(KIGAM, 2024). 5년간 10공의 시추가 수행되었던 심부 시추공의 심도는 약 750 m였으며, 이는 전 세계적으로 처분시설이 300 m 이하 지하 암반에 건설될 것으로 예상되기 때문에 처분시설 예상 심도보다 깊은 심도 조건과 수치해석을 위한 경계 조건, 경제적 및 행정적 관점 등을 고려한 것이다(Cheon et al., 2024b). 심부 시추공을 통해 부지에 대한 기본적인 암반 특성을 파악할 뿐 아니라 물리검층 등을 포함한 다양한 현장시험이 수행된다. 이때, 시추공의 공곡(deviation)이 크면 클수록 심도와 위치 등에 관한 부정확한 정보로 실제 위치에서의 부지 특성을 파악할 수 없을 뿐만 아니라 시추 종료 심도에서 위치는 실제 목표 위치와 많은 차이가 발생할 수 있다.
공곡이란 목적하는 수직, 수평, 경사 등을 포함하는 시추 방향 기준으로 실제 굴진할 때의 시추공이 휜 정도를 의미하며, 시추공이 지표면에서부터 계획된 직선 경로에서 얼마나 이탈했는지를 나타내는 지표이다. 시추가 심부로 진행될수록 암반의 불균질성, 시추장비의 편차, 중력과 응력 작용 등의 영향으로 시추공이 휘어지는 현상이 발생할 수 있다. 또한 시추장비가 설치된 지점의 지반 상태, 자갈 및 전석 등과 같은 지반의 구성 성분, 암반층 내 단층, 파쇄대와 같은 연약대 및 수직 절리, 층리 등과 같은 지질학적 특성에 의해 영향을 크게 받는다. 시추공의 3차원 궤적을 측정하는 공곡 검층은 시추공의 심도가 깊어질수록 중요성이 커진다. 국내의 경우 주로 영상검층 장비에서 제공되는 자료를 이용하여 공곡 검층을 대신 수행하였기에 공곡 검층을 별도로 수행하는 것이 보편화되지 않았다(Song et al., 2022). 그러나 공곡은 고준위방사성폐기물 심층 처분시설 설계의 정확도에 영향을 주기 때문에 정밀한 측정이 필수적이며, 공곡 검층을 통해 공곡도 및 공곡방향을 측정할 수 있다.
본 논문에서는 전국을 4개의 지체구조(경기육괴, 옥천대, 영남육괴, 경상분지)와 4종의 고준위방사성폐기물 후보 가능 암종(화강암, 퇴적암, 편마암, 화산암)을 기준으로 나누어 수행했던 심부 시추 사례를 통해 암종이나 암반 조건 등에 따른 공곡 측정 결과, 초과 공곡 발생 원인과 함께 공곡도 향상 방안에 대해 다룬다.
2. 국외 공곡 측정 사례
국외에서도 고준위방사성폐기물 부지조사 수행에 있어 공곡 측정이 기본적으로 수행되었다. 이는 정확한 시추공의 공곡 측정은 시추공 조사가 부지조사 범위 내에 위치하는지를 파악할 수 있는 기본적인 수단이며, 또한 시추공 공곡 측정을 통해 서로 다른 시추공 검층조사로부터 획득한 자료를 공간상에서 올바른 위치에 배치하는데 중요하기 때문이다. 본 절에서는 핀란드와 스웨덴에서 수행되었던 심부 시추공의 공곡 측정 사례를 일부 소개한다.
2.1 핀란드 고준위방사성폐기물 부지조사의 공곡 측정 사례
2.1.1 OL-KR19 시추공
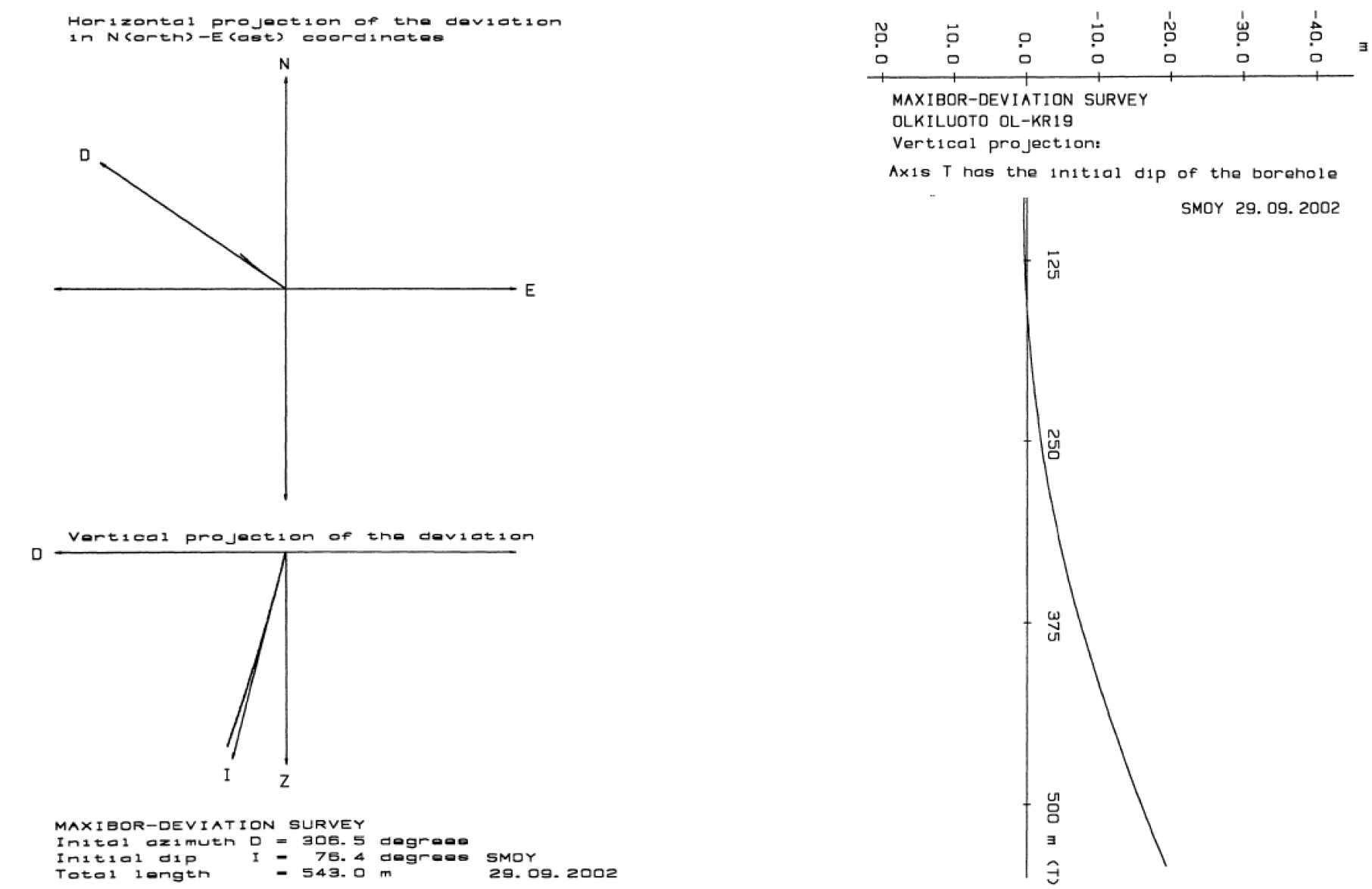
핀란드의 처분사업자인 Posiva는 2002년, 계획 중인 처분시설의 접근 터널이 들어설 가능성이 있는 지역의 지질 조건을 평가하기 위해 OL-KR19 지점에서 코어 시추 조사를 수행하였다. 최종 시추 심도는 544.34 m이며, 구경 76 mm로 시추가 수행되었다. 시추공 OL-KR19의 정확한 궤적 추적을 위해, Maxibor 및 EMS 시추공 공곡 측정 장비를 사용하여 경사(dip) 및 방위각(azimuth)을 측정하였다. Maxibor 장비는 로드를 이용해 시추공에 하강시켰으며, EMS 장비는 와이어라인 케이블을 이용해 측정하였다. 측정 간격은 3 m였다. 이와 별도로, 시추공의 경사는 SLO-H90 시추공 경사계(dip meter)를 이용하여 측정 되었다(Posiva, 2002).
EMS 장비는 전자 가속도계를 이용해 시추공의 경사를 측정하고, 3축 플럭스게이트(fluxgate) 자력계를 이용해 자기 북(Magnetic north)을 기준으로 방위각을 측정한다. 제조사의 사양에 따르면, 자기 이상이 없는 경우 방위각의 정확도는 ±0.5°, 경사의 정확도는 ±0.2°였으며, 올킬루오토 지역에서는 뚜렷한 자기 이상이 관측되지 않았다. 방위각은 자기 북 기준으로 제공되며, 이 지역의 편각(약 4.5°)이 결과에 더해졌다. 지역적으로 편각에는 다소 차이가 있을 수 있다.
Maxibor 장비는 6 m 길이의 튜브에 3 m 간격으로 세 개의 반사 링(reflector ring)이 설치되어 있다. 튜브가 시추공을 따라 굽을 때, 반사 링은 더 이상 동심원이 아니게 되며, 링 간의 편차를 통해 시추공의 곡률을 계산할 수 있다. 기준 방향은 원형 기포 수준계(bubble level)를 통해 제공되며, 링과 기포의 위치는 비디오 카메라로 각 측정 지점에서 기록된다. 장비는 구경 46 mm 시추공에 맞춰 설계되어 있으며, 76 mm와 같은 더 큰 구경의 시추공을 측정할 때는 적절한 크기의 중심 유지용 링(centralizing rings)을 반사 링 주변에 설치한다. 초기 좌표 및 방위각과 반사 링의 편차를 기반으로 컴퓨터 프로그램이 각 측정 지점에서 시추공의 좌표와 방향을 계산한다. 제조사에 따르면, Maxibor 측정의 일반적인 정확도는 800 m 길이의 46 mm 시추공 기준으로 ±1 m이다. Maxibor 측정은 3 m 간격으로 수행되었다. 시추공의 좌표와 방위각은 발주처인 Posiva가 제공한 측지 기준점(geodetic fix points)을 토대로 하였으며, 초기 경사는 별도의 경사계로 측정하였다.
1997년에 여러 방법으로 수행된 측정 결과들 사이에 일부 차이가 관찰되었다. Maxibor 결과는 작업 보고서 98-05의 권고에 따라 결과 제출 전에 보정되었다. 보정 과정에서는 Maxibor 측정의 경사값이 SLO-H 90 시추공 경사계로 측정된 경사값과 일치하도록 조정되었다. 이후 각 측정 지점에서의 시추공 좌표와 방향이 계산되었다.
시추공 OL-KR19의 초기 경사는 각각 76.4°였으며, 방위각은 306.5°였다. 시추공의 기준 레벨과 심도 측정은 지표면을 기준으로 하였다. 시추공 OL-KR19에서는 Maxibor 측정이 543 m 심도까지, EMS 측정이 540 m 심도까지 수행되었다. EMS 측정 결과에 따르면, OL-KR19 시추공은 540 m 지점에서 시추공 시작 방향에 대해 우측으로 7.82 m, 상방으로 17.03 m 편차를 나타냈다. 총 편차는 시추공 길이의 3.5%에 해당한다. 보정된 Maxibor 측정 결과에 따르면, 542 m 심도에서 시추공의 수평 편차는 우측으로 7.93 m이며, 수직 편차는 시추공 시작 방향에 대해 하방으로 19.30 m이다. 총 편차는 시추공 길이의 3.8% (공곡 2.2°)에 해당한다. Fig. 1은 OL-KR19의 공곡 궤적이다.
2.1.2 OL-KR58
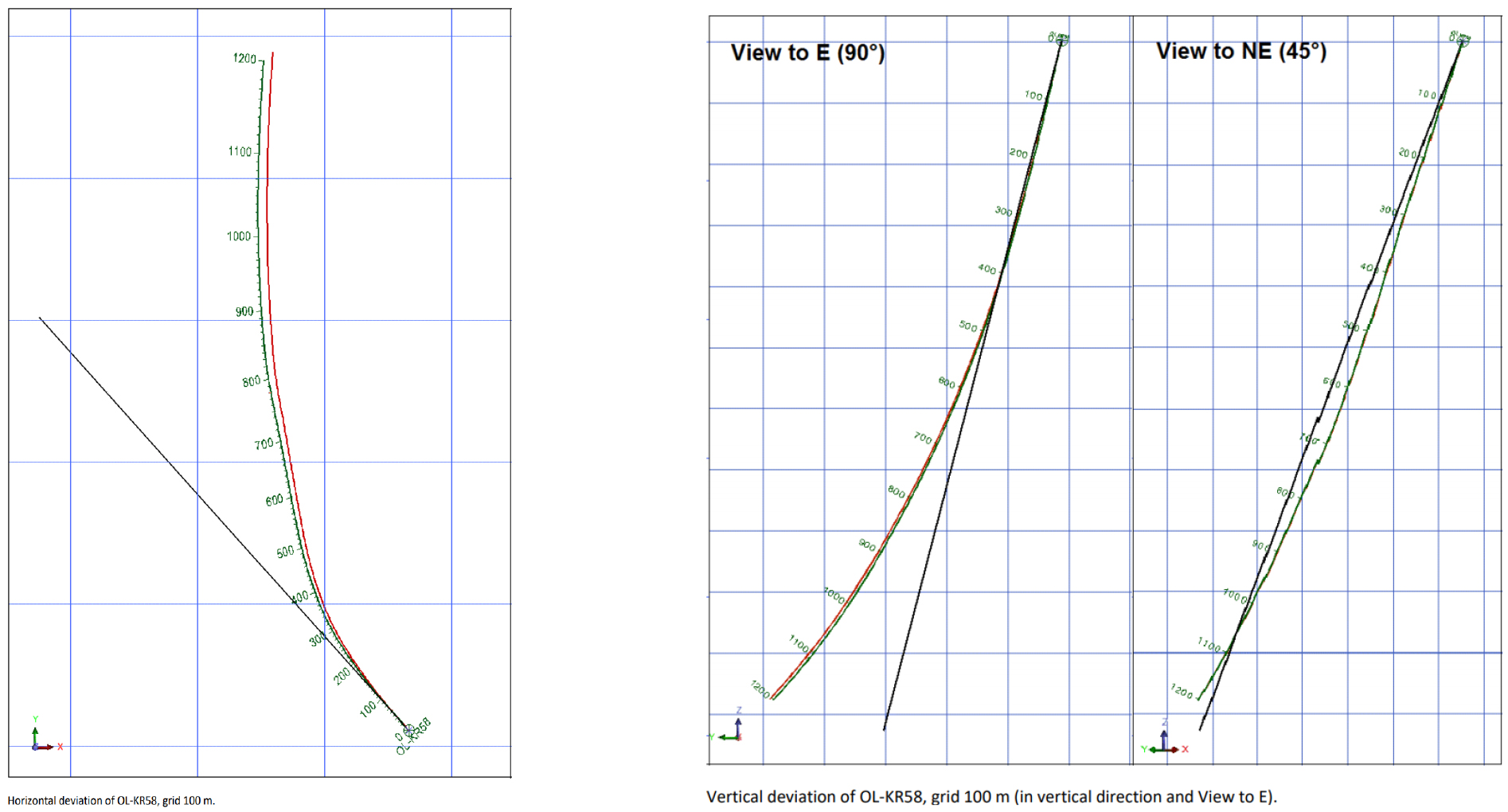
핀란드 Posiva는 2016년 부지 조사를 목적으로 올킬루오토 남서부에 위치한 쿠시센마섬(Kuusisenmaa island)의 서쪽 해안가에 있는 OL-KR58과 OL-KR58B를 시추하였다. 시추 작업은 지질학적 조건을 확인하기 위해 1,200 m 심도를 목표로 시추가 이루어졌고, OL-KR58의 최종 시추 심도는 1,201.14 m이며, 구경은 약 76 mm였다. 초기 방위각은 315°이며, 초기 경사는 70°였다. 시추공 궤적을 파악하기 위하여, 3성분 가속도계가 장착된 Reflex Gyro 측정 장비가 사용되었으며, 경사 정밀도는 ±0.2°였다. 수평 방향은 자이로스코프를 이용하여 측정되었다. 제조사에 따르면 40분 동안 측정되었을 때, 800 m 심도에 대해 ±0.5°의 정밀도를 갖는다고 보고되고 있으며 측정 간격은 5 m이다.
공곡 검층은 검층 장비나 케이싱이 시추공 내에서 중앙에 위치하도록 하는 역할의 센트럴라이져(centralizer) 없이 드릴 스트링(drilling string, 시추 유체와 회전력을 드릴 비트로 전달하는 드릴 파이프의 기둥) 내에서 측정되었다. 드릴 스트링 내 측정과 함께 스트링 바깥에서도 측정하였다. Fig. 2는 측정된 시추공 궤적의 모습으로, 검은 선이 계획된 시추공을 나타낸다. 바깥에서 측정된 공곡은 초록색을, 안쪽에서 측정된 공곡은 빨간색으로 각각 표현되어 있다. 최종 심도에서 편차는 254 m였으며, 동쪽으로 177 m, 북쪽은 182 m 떨어져 있었다. 수직 편차는 50 m 상향되어 나타났다. 계산된 공곡은 12°로, 공곡이 크게 발생한 첫 번째 이유는 350 m~470 m 심도에서 대규모 파쇄대가 출현했기 때문이며, 두 번째 이유는 시추 시 굴진 속도가 다소 높았기 때문으로 보인다. 심도가 깊은 시추공의 경우 대부분의 시추공이 위쪽으로 휘는 경향이 있기 때문에 이러한 수직 편차는 일반적인 현상에 가까운 것으로 판단하였다.
2.2 스웨덴 고준위방사성폐기물 부지조사의 공곡 측정 사례
스웨덴 처분사업자인 SKB의 부지 조사 범위 내에서, 정확한 시추공의 공곡 측정은 시추공 검층(borehole logging)의 다양한 조사 자료를 공간상 올바른 위치에 배정하기 위해 매우 중요하였다. 공곡 검층 장비의 전면적 교정은 불가능했으며, 다만 Äspö(시추공 KAS13)에 위치한 깊이 256 m까지 이어지는 짧은 시추공에서 일부 소규모 검증 시험만 수행되었다고 보고하였다(SKB, 2007). 이 시추공은 지표면에서 시작하여 Äspö 터널까지 관통한 시추공이었다. 이러한 상황으로 인해 SKB는 사용할 수 있는 유일한 품질 지표는 동일한 시추공에서 여러 차례 공곡 검층을 반복한 측정한 결과를 비교하는 재현성(repeatability)인 것으로 판단하였다.
2002년에서 2007년 사이에 수행된 스웨덴 부지 조사 프로젝트에서는 시추공 공곡 측정을 위해 두 가지 유형의 장비 - 광학 장비(Optical tool)와 자기계/가속도계 기반 장비(Magnetometer/accelerometer based tools)-가 일반적으로 적용되었다. Oskarshamn 지역에서 수행된 대부분의 코어 드릴링 시추공(core-drilled borehole)에서는 두 가지 방법이 모두 적용되었으며, 많은 시추공에서는 두 장비를 이용한 반복 측정도 수행되었다. 일부 코어 드릴링 및 충격 드릴링(percussion-drilled) 시추공에서는 다른 장비(예: 음향 텔레뷰어(Acoustic Televiewer))를 통해 공곡 자료를 확보하였다. 코어 드릴링 시추공의 경우, 2개의 시추공은 경사계/자기계 기반의 Boremac으로 측정되었고, 1개의 시추공은 광학 장비인 Maxibor로 측정되었다. 또한 시추공 길이가 200 m 미만인 20개의 시추공은 2회의 자기계/가속도계 검층으로 측정되었으며, 16개의 시추공은 두 가지 방법으로 각각 1~2회의 검층이 수행되었다. Oskarshamn 지역의 충격 드릴링 시추공의 경우, 13개 시추공은 Flexit 자기계/가속도계 검층(Fig. 3)으로, 15개 시추공은 음향 또는 광학 텔레뷰어(Optical Televiewer)로 측정되었다. Flexit 자기계/가속도계 검층 장비는 미리 정의된 시추공 매개변수(예: 시추공 ID, 날짜 및 시간, 측정 간격, 측정 간 시간 간격 등)로 설정된 후, 와이어를 이용해 내부로 하강시킨다. 프로브(probe)와 휴대용 컴퓨터는 서로 동기화 시간을 사용하여, 프로브가 사전에 정의된 심도에 도달하면, 측정을 수행한 후 다음 심도로 하강시킨다. 일반적으로 공곡 검층은 하강 및 상승 방향 모두에서 3 m 간격으로 수행된다. 1987년에 굴착된 9개의 충격 드릴링 시추공은 Boremac으로 측정되었다. 6개의 시추공은 전혀 측정되지 않았으며, 단지 초기 방향(경사각과 방위각)만 기록되었다.

초기에는 코어 드릴링 시추공의 최종 공곡 파일 계산 시 광학 장비의 측정값을 기반으로 하였다. 그러나 2006년 가을부터 2007년 초까지 이루어진 지질학적 대상인 단층, 절리, 암석 경계 등의 방향성에 대한 대규모 품질 검토 과정에서, 공곡 측정 신뢰성에 대한 재평가가 이루어졌다. 광학 장비를 사용할 때 낮은 재현성과 길이 측정 오류 문제가 발견되어, 새로운 전략이 도입되었다. 이 전략은 여러 공곡 측정 결과를 결합할 수 있게 하며, 불확실성을 정량화할 수 있도록 하였다. 또 하나의 중요한 성과는 측정 불확실성(uncertainty)의 도입이다. 오류(error)로 표시되지 않은 모든 공곡 검층은 새로 계산된 공곡 파일과의 차이를 산출하는 데 사용되었다. 이에 따라, 불확실성 계산은 측정 불확실성 자료에 비해 더 많은 공곡 검층 자료를 기반으로 할 수 있었다.
다음은 코어 드릴링 시추공(KLX01)에서 수행된 공곡 검층의 사례이다. Fig. 4는 시추공 KLX01의 단면과 구경 등의 기술적 내용을 도표와 함께 제시한 것이다. KLX01의 최종 심도는 1077.99 m이고, 1회의 공곡 측정이 수행되었다.
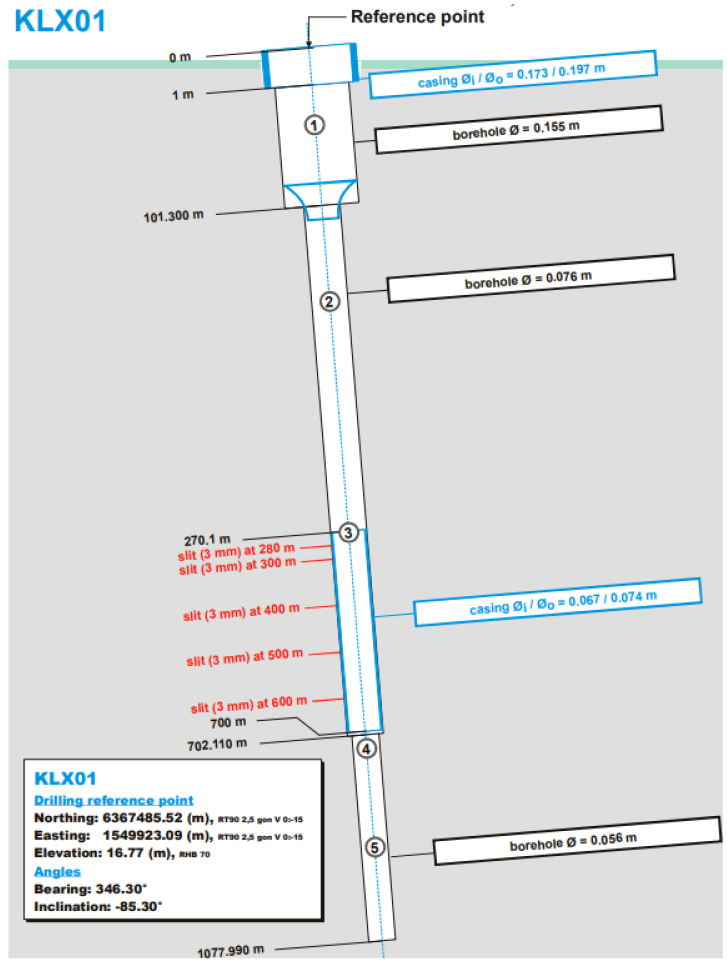
이 공곡 측정은 SICADA (SIte ChAracterization DAtabase)에 Table 1과 같은 형태로 저장되어 있다. SICADA는 SKB에서 만든 지구과학적 데이터베이스로서 처분과 관련된 연구, 조사를 통해 얻은 자료를 수집하고 저장하고 있다(Kim et al., 2023, SKB, 2000). 첫 번째 시추 기간 후, 1988년에 KLX01 시추공에서 Boremac 장비를 사용하여 시추공 길이 0~690 m 구간에서 1회의 공곡 측정이 수행되었다. 이후 시추공은 1990년 5월 7일에서 1990년 8월 4일 기간 동안 1,077.99 m 시추공 길이까지 연장되었다. 그러나 시추공의 연장된 부분에서는 공곡 측정이 실행되지 않았고, 연장된 부분인 690 m 이하는 마지막으로 측정된 깊이(690 m)와 동일한 경사각과 방위각으로 계산되었다.
Table 1.
Deviation logging activities of KLX01 in SICADA (modified from SKB, 2007)
공곡 측정(Table 1의 activity ID 3013109)을 시추공 공곡 다중 측정으로 계산하려는 첫 번째 시도(ID 13145663)는 측정 구간 사이의 10 m 간격을 사용할 수 없어, 시추공 공곡 다중 측정은 측정 구간 사이의 최대 4.5 m 길이로 설계되었다. 이후 시추공 공곡 다중 측정에 따른 새로운 계산들이 수행되었고, Boremac으로 측정된 시추공에 대한 불확실성, 즉 경사각 3°, 방위각 6°로 새로운 EG154(activity type code) 파일인 ID 13166963이 구성되었다. Table 2와 Table 3은 각각 시추공 공곡 다중 측정 계산을 위한 공곡 데이터와 약 100 m 표고마다 제시된 구간 내용이 제시되어 있다. Fig. 5는 재평가 후 결과로써 제시된 공곡 자료의 모습이다.
Table 2.
Detailed information of KLX01 in EG154 file of SICADA (SKB, 2007)
Table 3.
Subset for every approx. 100 m of KLX01(SKB, 2007)
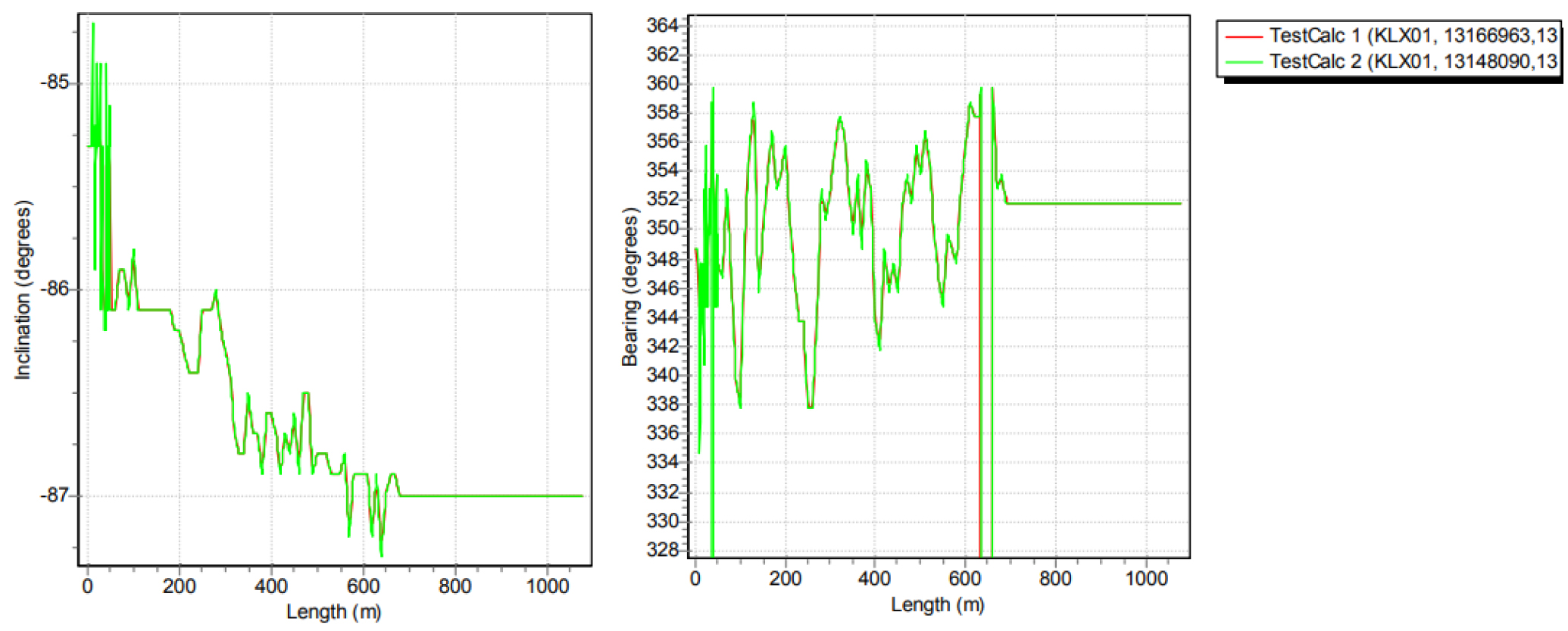
Table 1과 Table 2의 Idcode, Activity Id, Deviation Activity Id 등은 데이터베이스를 위해 사용된 구분 목록과 기호 등을 의미하며, Table 2의 Approved Secup과 Seclow는 검토 및 승인된 시추공의 상부와 하부 구간 경계 심도를 의미한다. Uncert 또는 Uncertainiy는 측정 불확실성의 정도를 나타낸다.
3. 고준위방사성폐기물 부지연구 관련 국내 공곡 측정 사례
3.1 국내 공곡 측정 사례
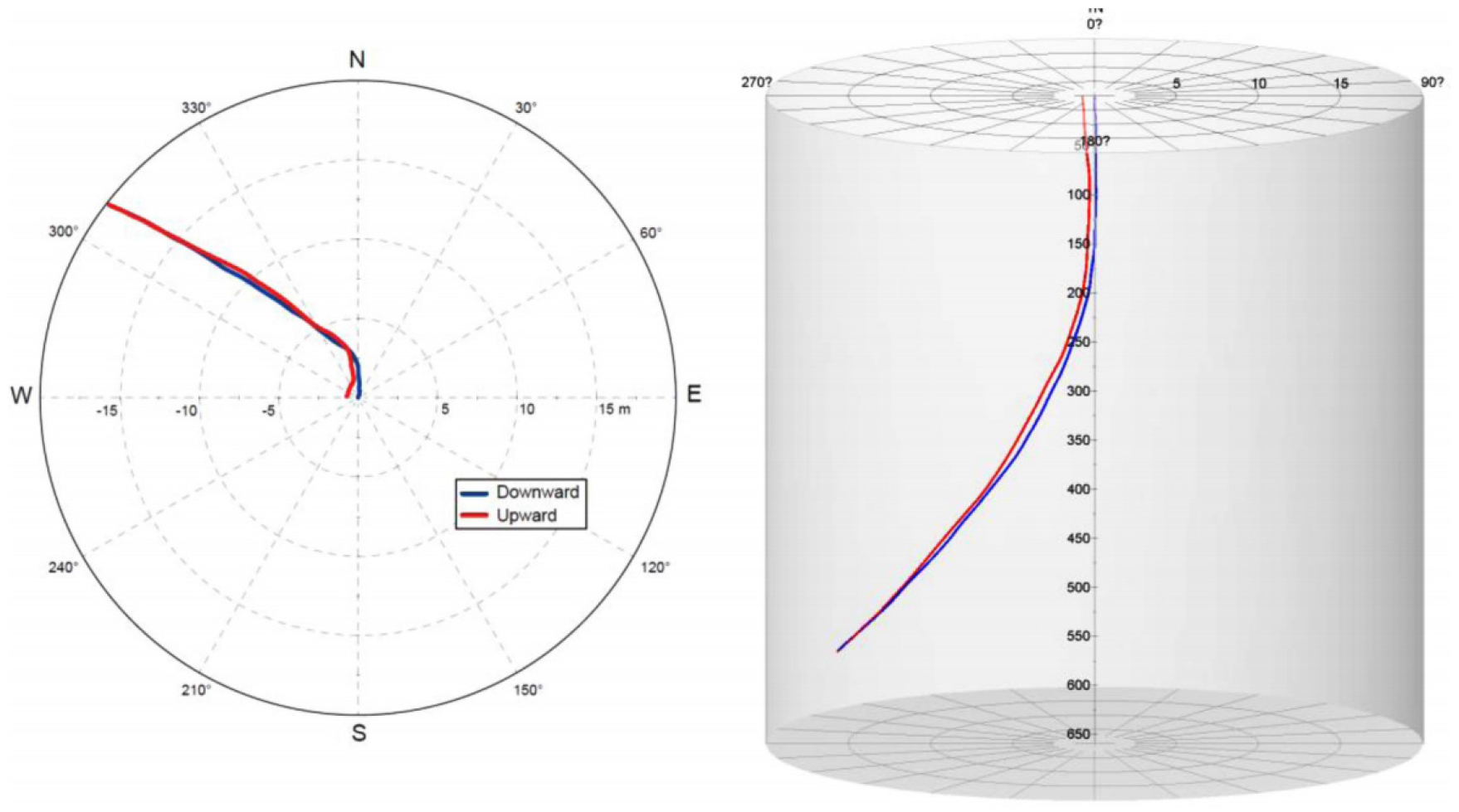
국내 공곡 측정에 대한 보고는 주로 공곡 측정에 관한 기술적인 내용 위주로 발표되었다(Cho et al., 2019, Song et al., 2022, Lee, 2023). Song et al.(2022)는 철재 케이싱이 설치된 곳에서도 적용이 가능한 K-DEV로 명칭된 공곡 측정 장비를 개발하였다. 개발된 장비는 고정밀 MEMS 자이로스코프를 사용한 가속도계 자료와 각속도 자료를 융합하여 600 m 심도까지 적용하였다고 보고하였다. Fig. 6은 NQ 구경으로 120 m 심도까지 철재 케이싱이 설치된 시추공에서 하향(downward)과 상향(upward)으로 이동하면서 측정을 수행한 결과이다. Song et al.(2022)은 제작된 장비를 기존 국외 검층기기와 비교 검증도 수행하였다.
3.2 고준위방사성폐기물 부지연구에 적용된 공곡 측정 장비와 원리
공곡 측정을 위해 사용되는 공곡 검층(또는 측정) 장비는 측정 원리에 따라 크게 자이로 기반 (Gyroscopic) 장비, 자력계를 사용하거나 자력계와 가속도계 방식이 결합된 장비, 광학이나 초음파 기반의 장비로 구분된다. 각각의 원리는 다음과 같다.
자이로스코프 공곡 측정 장비는 자이로스코프를 이용하여 자장의 영향을 받지 않고 정밀하게 공곡 측정이 가능한 장비로, 자성이 강한 지반이나 철재 케이싱에서도 안정적인 측정 가능하다. 자이로스코프란 위아래가 완전히 대칭인 팽이에 고리를 축에 직각인 방향으로 만들고 다시 그것을 제2의 고리를 써서 앞에 있는 것과 직각 방향으로 받든 후에, 다시 제3의 고리에 의하여 앞의 둘에 직각 되는 방향으로 지탱하여 줌으로써 팽이의 회전이 어떠한 방향으로도 일어날 수 있도록 한 장비로서 팽이가 빠르게 회전하는 동안 외부에서 충격이 가해져도 쓰러지거나 하지 않고 쉽게 자세(회전축)를 바꾸지 않고 회전축이 항상 일정한 방향을 가리키는 성질인, 일종의 관성력인 회전 관성모멘트를 이용한 것이다. 이러한 회전으로 발생하는 자이로 효과(Gyro Effect)를 사용하여 원점 위치를 역추적, 현재의 방향이 어느 쪽인지를 역산출이 가능하여 방향성(Orientation)을 측정할 때 많이 쓰이게 된다. 선박이나 항공기용 컴퍼스, 대형 선박의 수평 안정 장비, 로켓의 관성 유도 장비 등과 같은 분야에서도 응용되고 있다. 여기서 사용되는 자이로 효과는, 물체가 고속으로 회전하여 다량의 회전 운동에너지를 보유하게 될 때, 각운동량 보존법칙에 따라 회전축 방향이 잘 변하지 않기 때문에 회전축 방향으로의 정렬을 유지, 결국 고속으로 돌아가는 자이로의 회전축은 그 방향이 쉽게 변하지 않는다는 것을 의미한다. 그래서 일단 고속으로 팽이를 회전시킨 다음 그것을 기준 축으로 삼아 얼마나 돌아갔는지를 측정하는 것이다. Fig. 7은 자이로스코프의 원리 및 본 심부 시추공 공곡 측정에서 수행된 절차이다.

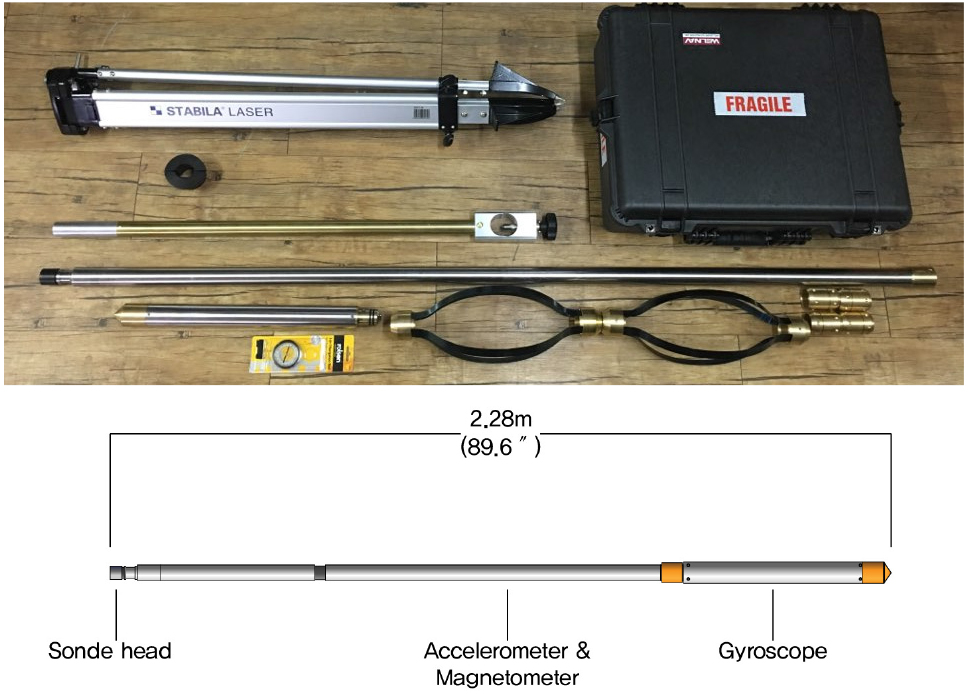
심부 시추의 공곡 측정에 사용된 자이로스코프 공곡 측정 장비는 RG (Robertson Geologging, 영국)사의 장비로 자료측정을 위한 기록계, 측정 센서부(프로브) 및 윈치부로 구성되어 있다. 기록계는 Micrologger2, 프로브는 Gyroscopic Verticality probe로 심도별 시추공의 경사각도, 경사방향 및 이격거리 등을 파악할 수 있으며, 윈치는 750 m 심도를 고려하여 1,100 m 윈치를 사용하였다. Table 4는 공곡 검층 장비의 상세한 제원 및 규격이다.
Table 4.
Specification of gyroscopic deviation measurement tool used in this study
자기(또는 자력계, magnetic) 공곡 측정 장비는 자성 센서의 원리를 이용하여 휜 시추공의 방향과 각도를 측정한다. 시추공 내에 설치된 자기 공곡 측정기는 자기장 센서를 기반으로 하며, 시추공의 방향과 각도에 따라 변화하는 지구 자기장을 감지한다. 시추공이 휘어져 있으면, 시추공의 위치에 따라 지구 자기장의 방향과 강도가 달라지며, 이 변화를 감지하여 시추공의 궤적을 추정한다. 측정된 각도와 방향 정보를 바탕으로 시추공의 3차원 좌표를 계산한다. 자기 공곡 측정 장비는 비접촉식 측정이 가능하며, 자기장 센서의 높은 감도와 정확한 데이터 분석을 통해 시추공의 궤적을 정확하게 측정할 수 있다. 그러나 자기장에 영향을 주는 철제 케이싱이 시추공에 설치되어 있거나 철 성분을 포함하는 광물이 포함된 암반에서 시추가 이루어지는 경우는 사용에 제한이 따른다.
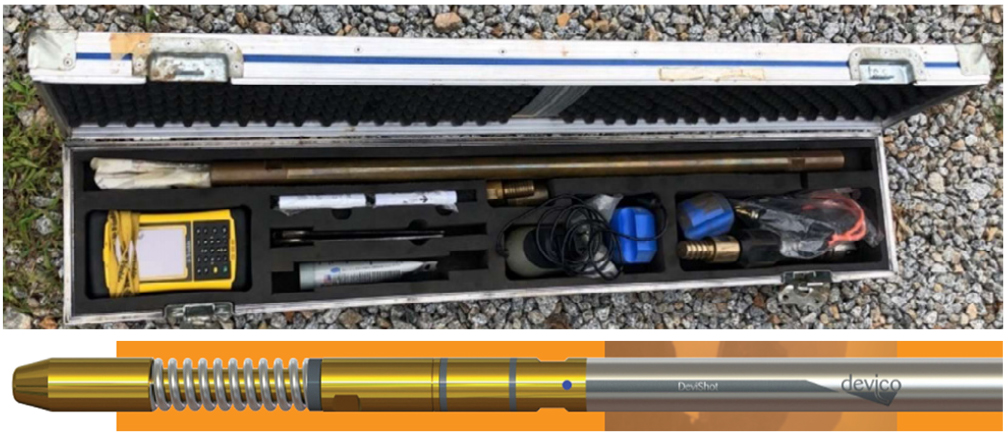
심부 시추공 공곡 측정에 사용된 자기 공곡 측정 장비는 노르웨이의 Devico사에서 제작한 DeviShot 장비로 Table 5와 같은 사양을 갖는다.
Table 5.
Specification of magnetic deviation measurement tool used in this study
시추공 텔레뷰어는 초음파를 시추공 내벽에 주사하여 얻게 되는 반사파의 진폭 및 주시를 분석하여, 시추공 내 부의 영상을 획득하는 장비로, 시추공벽과 교차하는 심부 암반의 불연속면(절리, 단층 등)의 상태 및 방향성을 탐지할 수 있다. 시추공이 직선인 경우, 360° 회전하는 각 방향에서 측정된 반사 거리가 모두 동일하지만, 시추공이 휘어져 있으면 특정 방향에서는 거리가 길어지고 다른 부분은 짧아지는 타원형 변형이 나타난다. 이러한 차이를 분석하면 시추공의 공곡을 측정할 수 있다.
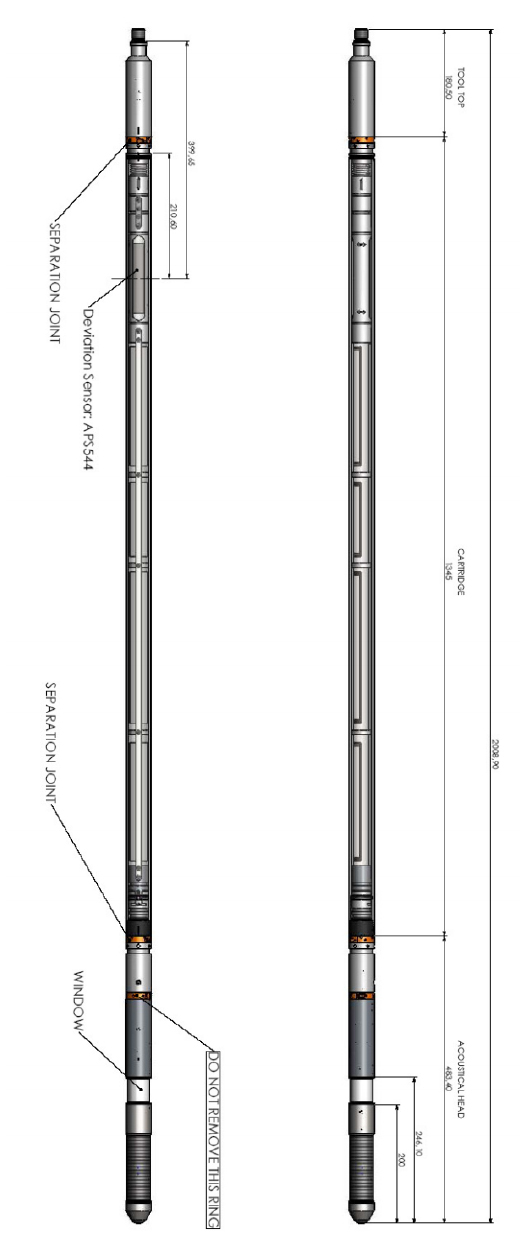
심부 시추공 공곡 측정에 사용된 초음파 주사 검층 장비는 Fig. 8과 같이 MS (Mount Sopris)사의 QL43 ABI 장비를 이용하였다. 해당 장비를 통해 자연감마 및 방사선원별 감마를 측정할 수 있다. 초음파 주사 검층의 경우 다른 검층에 비해 Logger로 전송되는 자료의 양이 많으므로 타 검층에 비해 느린 속도로 검층을 수행한다. 이는 장비의 성능에 따라 달라질 수 있으며, 사용한 장비의 경우 안정적인 계측 결과를 얻기 위해 1~2 m/min의 속도로 검층을 수행하였다.
3.3 국내 고준위방사성폐기물 부지연구 관련 심부 시추와 공곡 측정 사례
한국지질자원연구원에서 2020년부터 5년간 수행된 심부 시추 연구는 한국지질자원연구원이 2019년에 발간한 국내 지질 현황 - 화성암, 편마암, 퇴적암, 화산암의 분포 면적이 각각 30%, 30%, 25%, 6%로 구성-을 토대로 지체구조와 암종에 따라 심부 시추가 수행되었다. 또한 시추 지역은 지체구조와 암종 뿐 아니라 기존에 고준위방사성폐기물 연구나 사업과 관련하여 수행되었던 시추 지역(Table 6의 회색)을 고려하여 Table 6과 같이 결정되었다. 심부 시추의 목표 심도는 750 m이며, 암종에 따른 허용 공곡 수준을 다르게 설정하였다. 편마암반과 같은 편리 등이 존재하는 경우는 7°를 그 외 암반은 3°를 기본으로 규정하고 있다(KIGAM, 2021, KIGAM, 2024, Kim et al., 2024).
Table 6.
Deep borehole location based on 4 tectonic regimes and 4 rock types (modified from Cheon et al., 2024c)
Fig. 9는 심부 시추공에서 자이로 손데(gyroscopic sonde)를 시추공에 삽입한 후 공곡 측정을 수행하는 모습이다. 본 연구에서 공곡 측정은 일반적으로 1 m 간격으로 수행되었다. Fig. 10은 공곡 측정 후 획득한 결과의 예로, 시추공이 수직에 비해 0.79° 경사가 발생하였으며, 방향은 북쪽 약 255°로 휘어진 것을 의미한다. 최종 시추심도가 752.4 m이므로 당초 목표 대비 수평으로 10.4 m 떨어졌음을 의미한다.

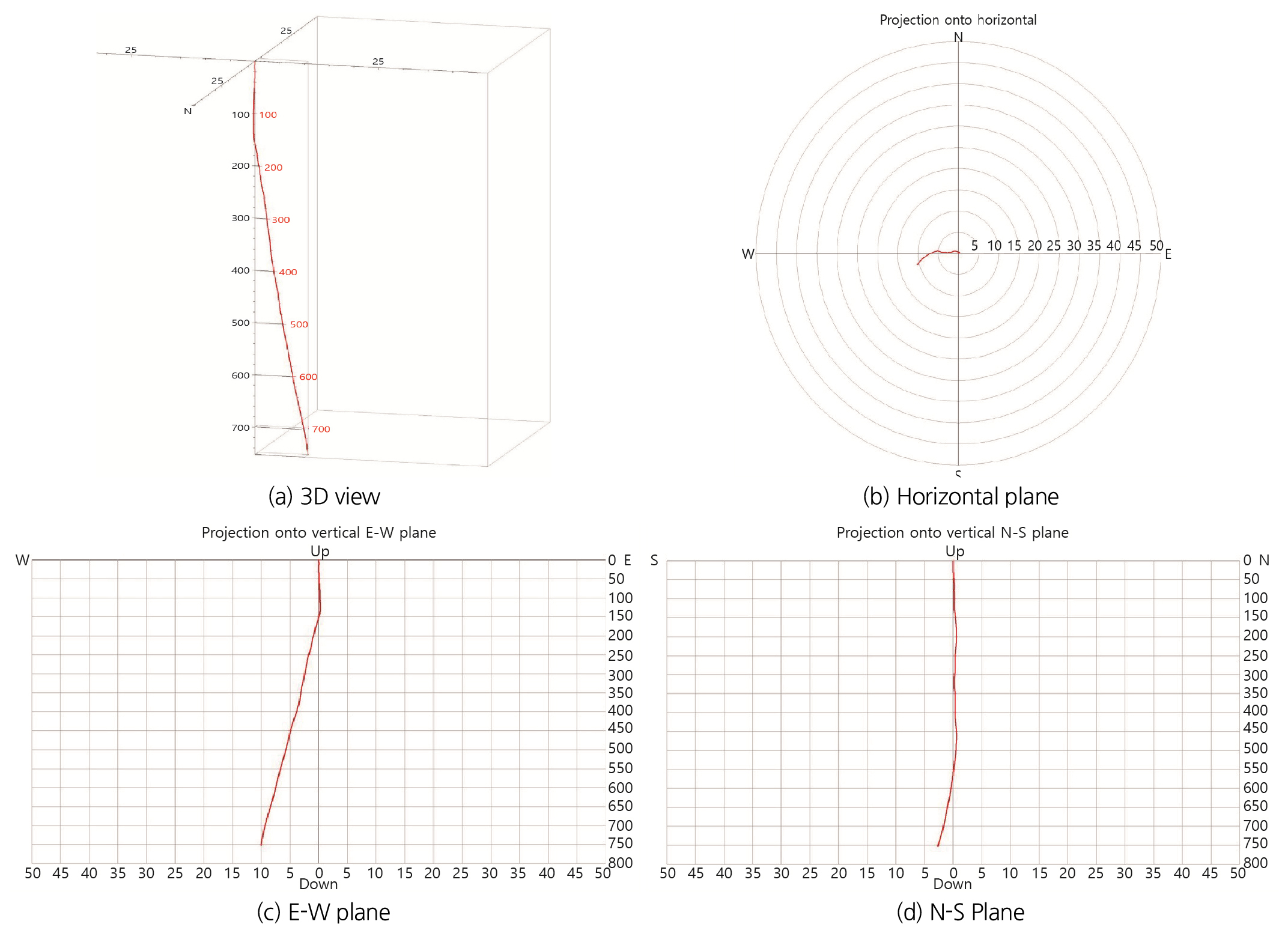
Fig. 11과 Table 7은 시추 지역과 심부 시추공의 정보를 포함한 공곡 획득 방법과 획득한 결과를 제시한 것이다. 시추가 시작되기 전 공곡의 목표값을 결정질암인 화강암의 경우 3° 이내, 층리나 편리를 갖는 퇴적암과 편마암의 경우는 7° 이내로 선정하였다. 경험이 누적된 후에는 퇴적암도 공곡 목표값을 3°로 낮추었다. 공곡 측정은 시추 중 250 m, 500 m 등의 지점과 최종 시추 완료 후 수행되었다. 최종 공곡은 Table 7에서와 같이 약 750 m의 장심도임에도 불구하고 공곡이 대체로 1° 전후를 유지하고 있어 성공적으로 시추가 수행된 것을 확인할 수 있다. 그러나 편마암반에서 수행되었던 홍천 지역의 경우는 당초 목표로 제시되었던 7°에 비해 심한 공곡이 발생하였으며, 퇴적암과 화산암에서도 1°를 넘는 경우가 있었다.
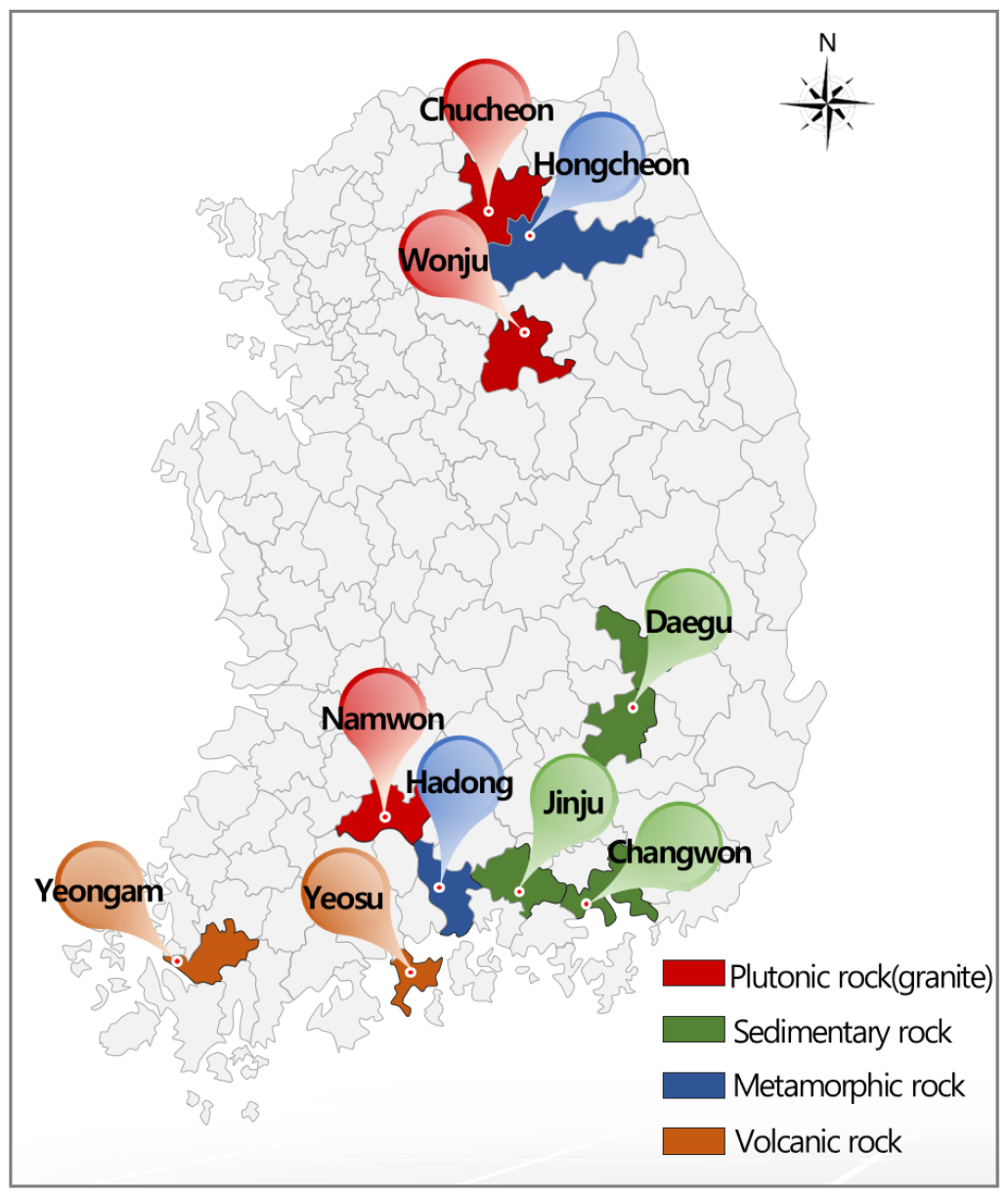
Table 7.
Summarized information of drilled deep boreholes
4. 공곡 발생 원인 분석과 공곡도 확보 방안
공곡의 발생은 앞서 서술한 바와 같이 시추장비가 설치된 지점의 지반 상태, 자갈 및 전석 등과 같은 지반의 구성 성분, 암반층 내 단층대나 파쇄대와 같은 연약대, 경사를 갖는 수직 절리 등과 같은 지질학적 특성 등에 크게 영향을 받는다. 또한 시추 속도가 빠를 경우 위에서 언급한 지반이나 지질 특성에 더 크게 영향을 받을 수 있다. 이번 절은 당초 목표 대비 초과 공극이 발생하였던 편마암반 장심도 시추 사례를 소개하고, 공곡도 향상을 위한 방안을 국내 경험과 국외 사례를 토대로 제시하였다.
4.1 목표 대비 초과 공곡 발생 현황 및 원인 분석
4.1.1 편마암반에서의 초과 공곡 발생 현황
편마암반에서 수행된 시추 지역은 홍천에 있으며, 강원대학교 학술림에 소속되어 있는 지역이다. 이 지역은 둥근 모양의 의암규암과 그 상부에 호상편마암, 흑운모편마암, 안구상편마암 등으로 구성된 의암층군과 이 의암규암의 직하부 용두리편마암암복합체 내에 위치하고 있다. 이 지역의 편마암류 엽리는 주향이 북동 방향에, 경사각은 60°에서 30° 내외로 북서쪽으로 경사하는 엽리와 북북서 방향의 주향에 남서쪽으로 40° 경사를 갖는 엽리가 발달하고 있다.
공곡 측정은 최종 심도의 3분의 1지점(약 250 m 심도)과 2지점(약 500 m 심도), 그리고 최종 시추 후로 계획되었다. 계획에 따라 시추 심도 246.1 m 굴진 후 1차 공곡 검층을 수행하였고, 공곡은 N137.17방향으로 3.07° 편향된 것으로 확인되었다. 이 결과를 토대로 최대 편향구간에 대한 선형회귀분석을 수행하여 종료 심도인 750 m 굴진 시 예측된 공곡은 NE방향으로 3.75° 편향될 것으로 예상되었다. Table 8은 심도 246.1 m의 공곡 검층 결과로부터 선형회귀한 결과이다.
Table 8.
Linear regression for the estimation of final borehole deviation from the deviation result at 246.1 m depth
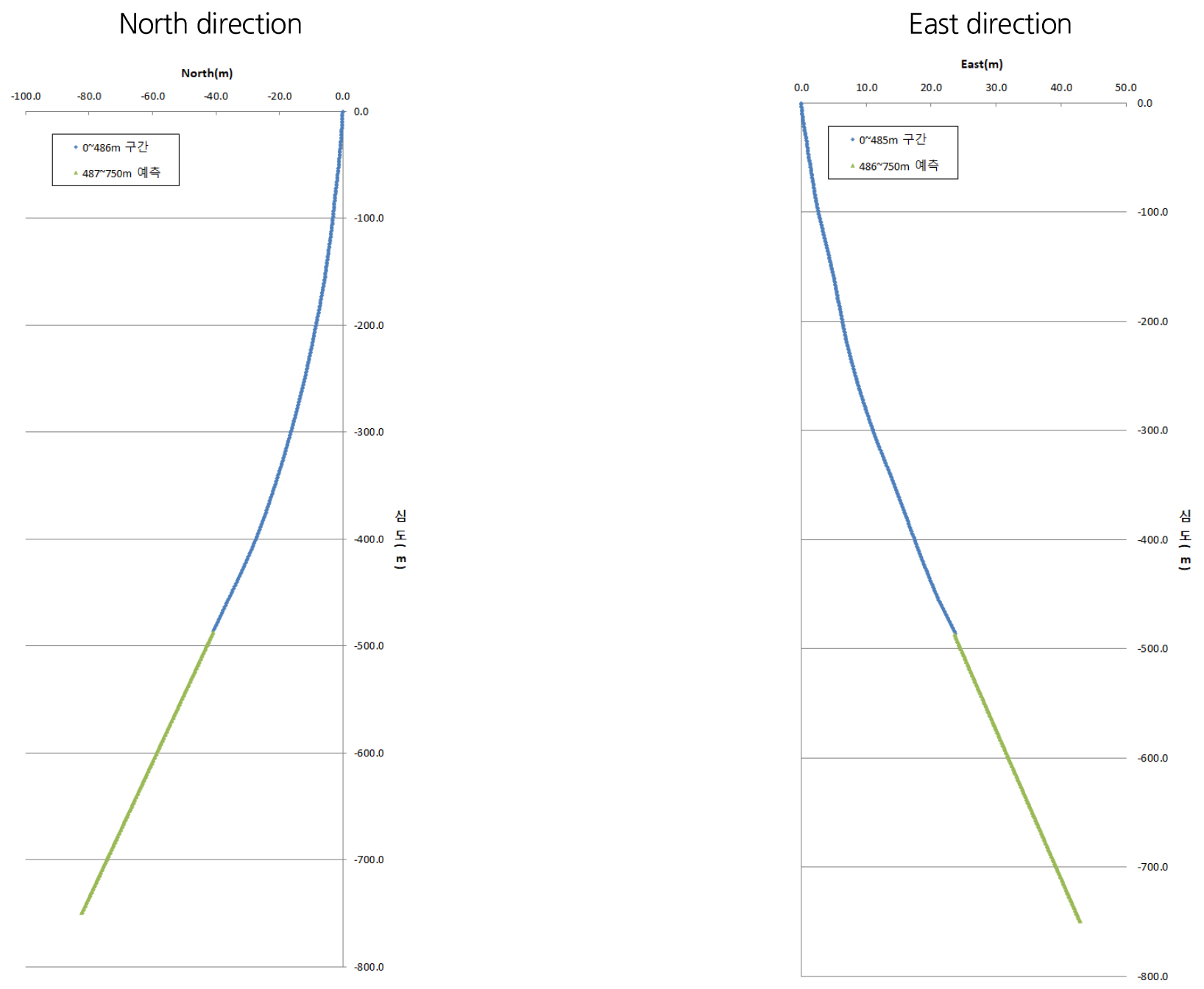
이후 심도 489.4 m 굴진 후 2차 공곡 검층을 수행하였으며, 0~489.4 m 구간에 대한 공곡은 N149.84 방향으로 5.59°편향된 것을 확인하였다. 1차 공곡 검층 시와 동일한 방법으로 0~750 m 구간에 대한 선형회귀분석을 수행하였다. 예측된 공곡은 NE방향으로 7.06°편향될 것으로 분석되었다(Fig. 12).
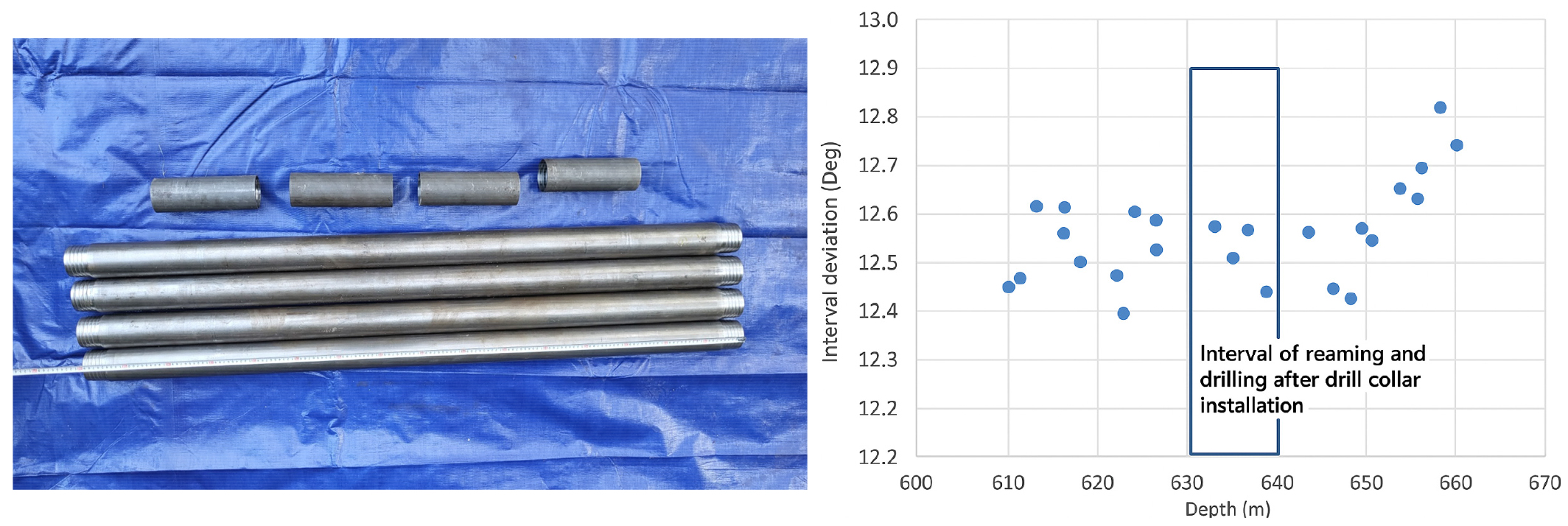
심도 0~489.4 m 공곡 검층 결과 및 이를 토대로 수행한 선형회귀분석 결과, 현재의 추세로 굴진이 진행되면 목표 공곡을 초과할 가능성이 높으므로 공곡을 완화시킬 수 있는 대책을 수립하였다. 공곡을 완화하는 방법에는 드릴칼라 (drill collar)장착법과 스테빌라이져(stabilizer) 장착법으로 구분할 수 있다. 드릴칼라 장착법은 고중량의 드릴칼라를 비트 상단에 장착하여 비트 자체에 하중을 추가로 가함으로써 중력에 의해 공곡을 제어하는 방법으로 완만한 공곡 제어가 가능하나, 적용 시 코어회수 중 와이어라인의 이용이 제한되므로 굴진 작업 속도가 지연될 수 있다는 단점이 있다. 스테빌라이저 장착법은 로드 중간마다 장착하여 드릴 스트링의 하중 중심을 공 중앙으로 맞춰주며, 공벽과의 이격을 완화하여 굴진 시 시추공의 편향과 진동을 제어하는 방법으로 회전식보다 충격식 굴진에 적합한 방법이다. 이러한 점을 고려하여 드릴칼라를 장착하는 것으로 결정하였으며, 코어배럴 상단에 스틱형 드릴칼라 4개(1.5 m × 4개 = 6.0 m)를 장착하여 굴진 하단의 중량을 증가시킴으로써 중력에 의하여 공곡의 편향 정도를 완화하는 방법을 적용하였다. 그러나 드릴칼라를 장착하면 코어 회수 시 로드를 모두 인발하여야 하므로 상당한 작업 시간의 지연이 예상되는 만큼 남은 시추 전체 구간에 적용하는 대신 공곡 편향의 흐름을 완화하는 정도와 함께 검토된 방법이 실제 적용이 가능한지를 파악하는 수준으로 적용되었다.
심도 630.0~634.2 m 구간에 드릴칼라 4개를 장착하여 리밍을 수행하였으며, 634.2~637.9 m 구간을 굴진함으로써 편향 완화를 시도하였다. 이후 심도 706 m에서 추가 공곡 측정을 수행하였으며, 드릴칼라 장착 후 굴진한 630~638 m 구간에서 편향 정도가 일부 완화된 것을 확인하였으나, 드릴칼라를 사용하지 않자 다시 공곡이 상승하는 것이 확인되었다(Fig. 13). 일부 구간만 공곡 완화 방법이 적용되어 최종 시추 후 공곡은 7.98°로 당초 목표 대비를 충족하지 못하였다.
4.1.2 편마암반에서의 초과 공곡 발생 원인 분석
시추 중 공곡 완화를 위한 대책을 적용하였으나, 현실적인 문제뿐 아니라 시추장비 설치 장소의 지반 상황과 심부의 지질 특성 등으로 인해 당초 계획 대비 목표를 달성하지 못하였다. 향후 동일한 상황이 발생하지 않도록 초과 공곡 발생에 대한 원인을 분석한 결과는 다음과 같다.
공곡 기준 초과의 첫 번째 원인은 상부 0~6 m 구간의 붕적층 내에 분포하는 최대 100 cm 내외의 전석층이 혼재하여 굴진 초기부터 일부 편향이 시작된 것으로 판단된다(Fig. 14). 시추 초기에 NQ3K로 0~7 m 심도 굴진 후 로드를 인발하고 NW케이싱 설치할 당시 전석층이 쏟아져 내리면서 공벽을 밀고 들어온 것으로 분석된다. 다만 초기 굴진 시에는 케이싱의 편향 정도가 크지 않았으나 전석에 의한 케이싱 측면의 하중은 지속적으로 유지되어 굴진을 진행함에 따라 편향이 점차 커진 것으로 분석된다. 일반적으로 심부 시추는 다단식 시추를 적용하였으나, 굴진 기간 및 비용 등의 이유와 함께 기존 결정질암 시추에서 NQ3K로 시추 시 문제가 없었던 경험을 토대로 본 시추 현장은 초기부터 최종 심도까지 NQ3K로 시추가 이루어졌던 점도 초기 굴진 방향을 수직으로 유지하는 데 방해 요소로 작용한 것으로 판단된다.

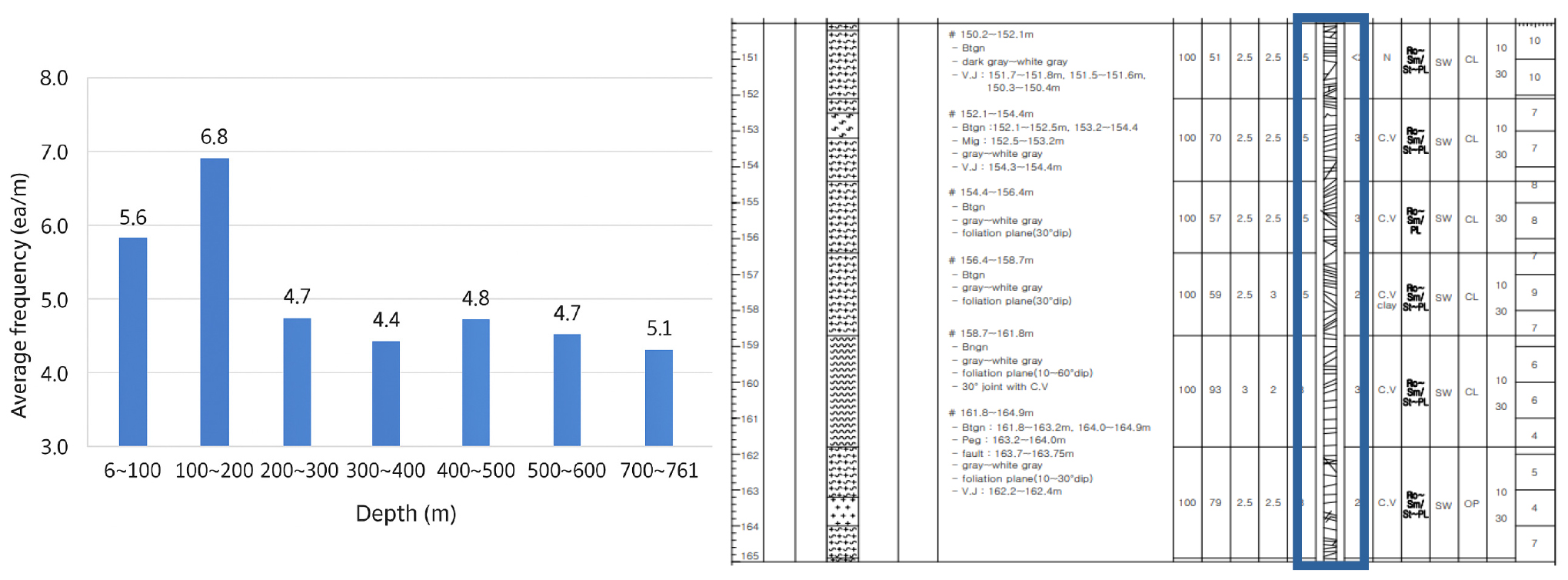
두 번째 원인은 시추공 전반에 걸쳐 빈번하게 분포하는 단층대와 파쇄대의 영향으로 판단된다. 특히, 홍천 지역의 편마암반 시추공에서 171.0~179.1 m에 분포하는 단층대는 전체 시추공 중 가장 넓게 분포하였다. 그라우팅을 수행하지 않고서는 시추공 유지가 어렵다고 판단되어 그라우팅을 시행하였다. 그라우팅을 시행할 때 조사된 바에 따르면 공동과 파쇄대를 확인하였다. 또한 단층대 구간 통과 시 단층점토와 단층각력암 밀집 구간이 확인되었고(Fig. 15), 171.0~179.1 m 구간의 평균 절리 빈도는 m 당 4.1~6.8개(100~200 m 구간의 경우에는 m당 6.8개)로 분석되었다(Fig. 16). 이 구간은 ‘심한균열’~‘보통균열’ 상태로 절리가 분포하고 있다. 단층대의 연약대 발달과 부분적으로 파쇄대와 수직절리가 빈번하게 발생하는 등의 불량한 암반이 전체적으로 흩어져있고, 대상 암반인 편마암의 전체적인 엽리 발달도 공곡 발생에 영향을 끼친 것으로 분석된다.

4.2 시추공 공곡 향상 방안
여러 암종에 대한 750 m급 심부 시추 경험을 토대로 시추공의 공곡을 향상하는 방안을 시추 전과 시추 중으로 나누어 제안하면 다음과 같다.
4.2.1 시추 전 공곡 향상 방안
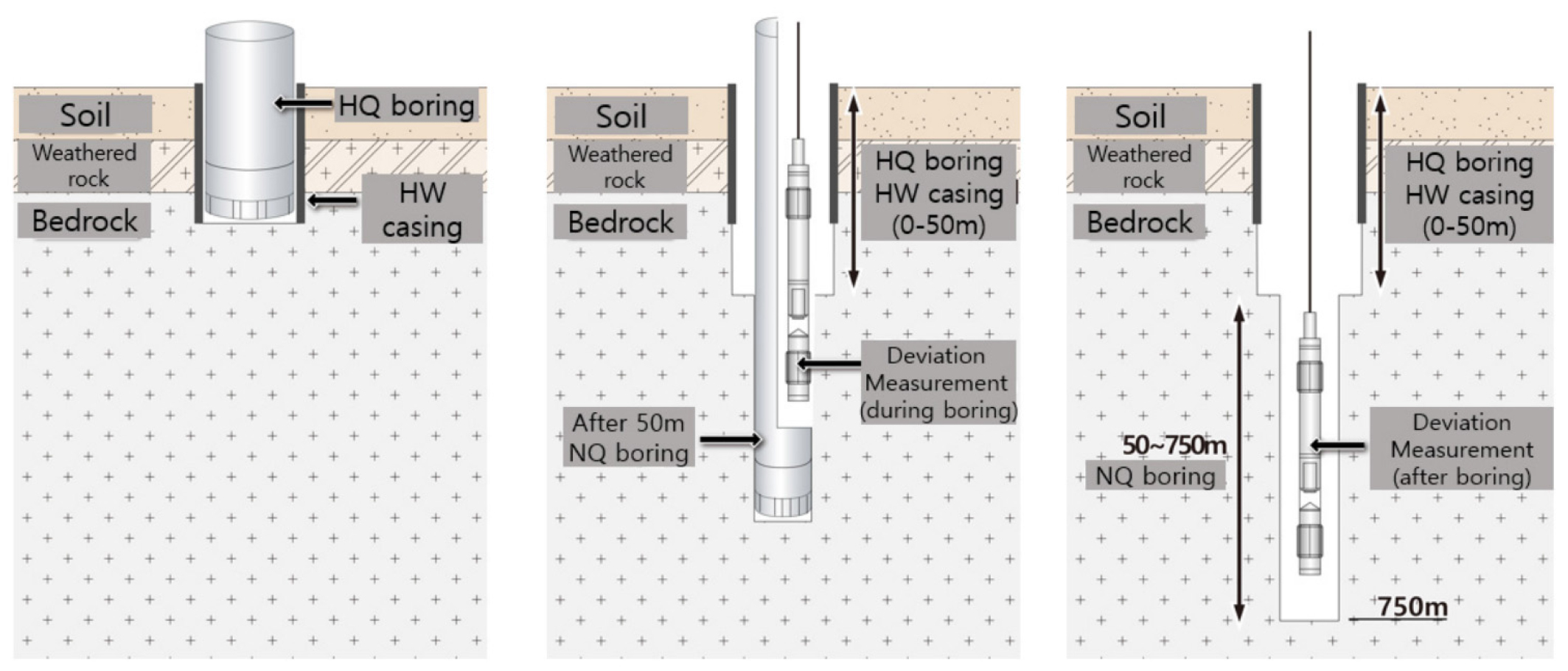
첫 번째로 심부 시추를 고려하여 구경을 달리하는 다단식 시추를 계획하며, 보호 케이싱을 설치하는 것이다. 일반적으로 심부 시추에서는 시추 중 발생하는 공벽 무너짐 등을 고려하여 초기에 대구경의 시추를 수행한 후 점차 소구경의 시추를 수행한다. 이는 비용 및 공기와도 관련이 있지만 퇴적암이나 화산암 등 상대적으로 연약할 것으로 예상되는 암종에서는 다단식 시추가 반드시 요구된다. 여건상 초기에 대구경으로 충분한 심도의 시추가 어려울 때도 토사 및 풍화암 구간에서는 케이싱 보강 등의 시행이 요구된다. 미고결 지반이나 토사층 내 전석, 자갈 등은 시추 시 공곡 발생 원인으로 작용하므로, 보호케이싱을 이중 또는 삼중으로 설치하는 것이 추천된다. Fig. 17은 다단식 시추와 보호 케이싱이 설치된 도시적 모습의 예로, 토사와 풍화암을 통과하여 모암까지 HQ 구경으로 시추를 수행한 후 HW 케이싱을 설치한 모습이다. 이후 HQ보다 작은 NQ로 시추하는 모습을 나타내고 있다.
두 번째 방안은 시추장비를 지탱할 수 있도록 충분히 지반을 보강하는 것이다. 심부 시추가 가능한 장비는 대체로 중량이 15~25 ton 또는 그 이상이며, 로드 등 중량물을 부착하면 30 ton에 육박한다. 또한 시추 과정에서 진동을 동반하므로 시추장비를 지탱하는 지반이 약하면 부분적인 침하를 발생시킨다. 특히, 우기 때 집중 호우에 의한 지반 함수비 증가나 동절기의 지반 동결·융해는 지반 침하의 원인이 된다. 따라서 시추장비 설치 지점에 콘크리트 패드를 타설하여 견고한 지지 지반 확보를 해야 한다. Fig. 18은 시추장비 설치 지점에 콘크리트 패드를 설치하는 예이다. 콘크리트 패드는 시추장비의 중량과 크기를 견딜 수 있도록 충분한 깊이와 면적을 확보하여 설치해야 한다.

세 번째 방안은 시추 전과 시추 중에 수시로 디지털 수평계 등을 이용하여 장비의 수직, 수평을 검사하여 수직, 수평이 이루어지도록 관리하는 것이다. Fig. 19는 시추장비의 각 부분에서 수직과 수평 등을 확인하고 있는 모습이다. 아울러 시추를 진행하면서 일정 간격으로 공곡 검층을 수행하여, 발생한 공곡을 확인하고 공곡 발생량이 큰 경우 목표 공곡을 달성할 수 있는지 검토한다.

네 번째 방안은 적절한 시추 속도를 유지하는 것이다. 암종이나 시추 구경에 따른 적절한 시추 속도가 현재까지 명확하게 제안되지 않았으나 빠르게 시추를 진행하면 고각의 절리나 엽리, 층리 등에 쉽게 영향을 받아 이들 방향으로 시추공이 휠 가능성이 높아진다. 따라서 시추 작업 공기를 줄이기 위해 과도하게 시추 속도를 높이는 것은 지양해야 한다.
4.2.2 시추 중 공곡 향상 방안
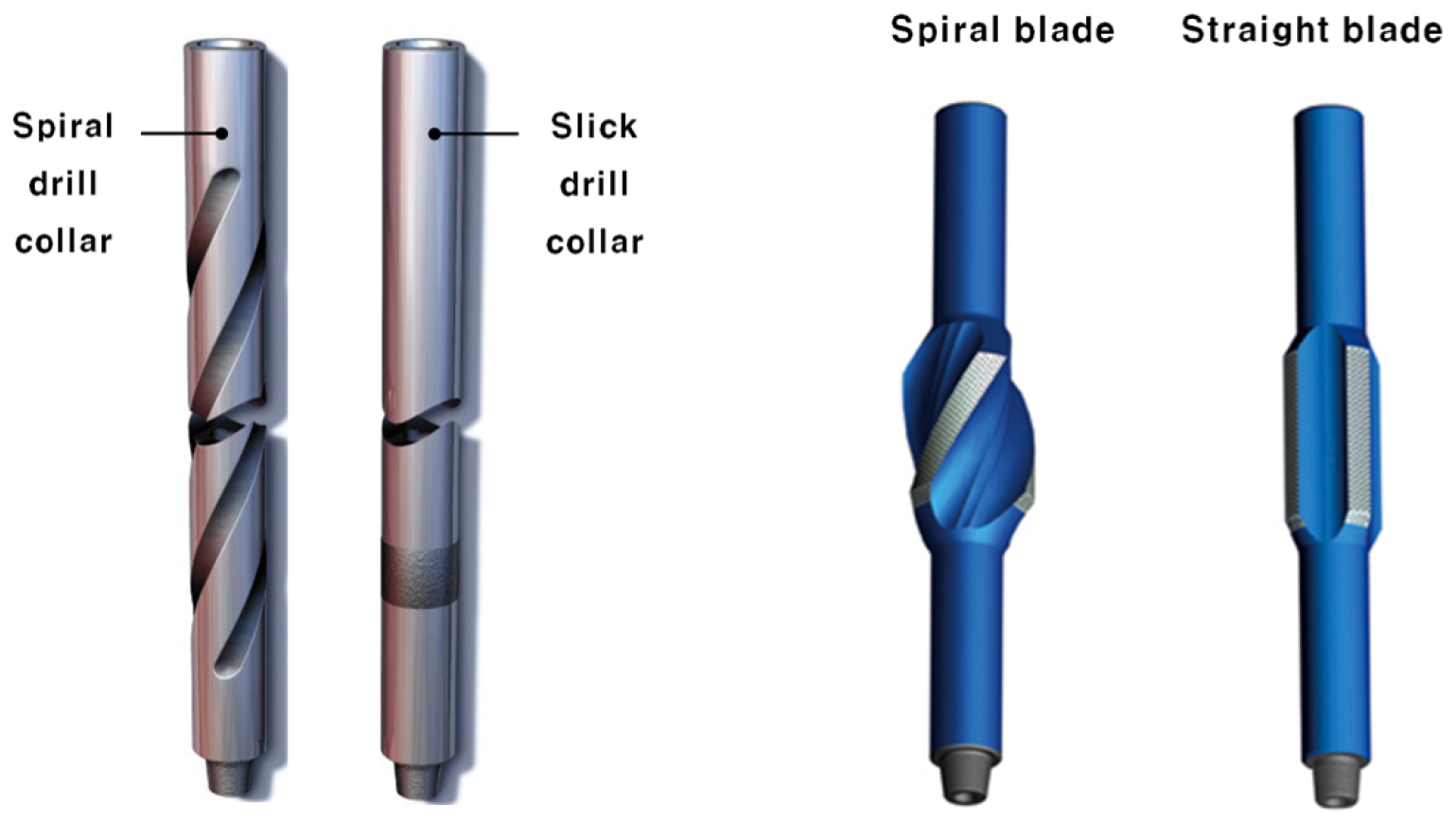
시추 중 공곡이 과다하게 발생한 경우, 공곡을 완화하는 것은 쉽지 않다. 따라서 앞서 서술한 바와 같이 시추 전에 수행할 수 있는 작업을 통해 공곡이 과다하게 발생하지 않도록 주의를 기울여야 한다. 공곡이 발생한 경우는 드릴칼라 또는 스테빌라이저를 시추장비에 장착하고 시추를 진행하여 공곡을 완화할 수 있다. 드릴칼라는 주로 굴진부에 장착하여 하중을 추가로 가함으로써 수직방향으로 굴진이 이루어지도록 도움을 주어 공곡을 제어하는 방식이며, 스테빌라이져는 로드 중간에 장작하여 로드 하중 중심을 공 중앙으로 맞추어 공벽과의 이격을 완화하여 공곡을 제어하는 방식이다. Fig. 20은 드릴칼라와 스테빌라이져의 예를 보여준다. 그러나 와이어 형식의 시추에서 드릴칼라나 스테빌라이져를 사용하는 경우, 시추가 진행하면서 로드 전체를 인양 후 추가 작업이 수행되기 때문에 공기가 지연되는 문제가 있다.
5. 결 언
고준위방사성폐기물 처분장 부지선정이나 부지조사 등에 있어 지표에서 수행되는 지질조사, 물리탐사 등과 함께 심도에 따른 암반의 상태를 직접 확인할 수 있는 시추는 필수적이다. 특히 고준위방사성폐기물 처분장이 위치할 것으로 예상되는 심부 500 m 이하를 조사하기 위해서는 심부 시추가 요구된다. 심도가 깊어질수록 적은 공곡이라도 심부에서는 실제 목표 위치와 많은 차이가 발생하기 때문에 심부 시추에서 공곡을 관리하는 것은 조사에서 기본 사항에 해당한다.
본 보고에서는 핀란드와 스웨덴에서 수행했던 심부 시추에서 공곡 측정 사례와 단층대를 만나 공곡이 크게 변화된 경우 등을 소개하였다. 또한 국내에서 2020년부터 2024년까지 고준위방사성폐기물 처분장의 부지연구에서 수행되었던 약 750 m 심도의 암종별 시추공에서 획득한 공곡 결과를 제시하였다. 국내에서 수행된 심부 시추에서 공곡 관리를 위해 시추 중과 최종 시추 후 공곡 측정을 자이로 기반, 자력계 기반, 초음파 기반의 공곡 측정 장비를 활용하여 수행하였다. 대부분 공곡 관리 목표로 설정된 수치(화강암반의 경우 3° 이내, 퇴적암 또는 편마암의 경우 7° 이내)를 만족하였고, 그 수치는 1° 전후였다. 암종별 10개의 심부 시추공의 사례에서 층리와 엽리, 편리 등이 있는 암종에서 공곡이 약간 크게 발생하는 것을 알 수 있었다. 그러나 시추장비가 위치한 지반 상태가 열악하고, 시추 중 다수의 연약대와 만났던 편마암반의 홍천 지역 시추공의 공곡은 7°를 상회하였다. 이 시추공에 대한 공곡 초과 발생 원인을 분석한 결과, 0~6 m 심도 지반(붕적층) 내 존재했던 큰 규모의 전석들과 여러 변성작용을 받은 편마암반에서 자주 나타난 연약대와 파쇄대 등에 의해 영향을 받은 것으로 파악되었다. 이러한 경험과 국외 시추 사례를 토대로 시추 전과 시추 중으로 구분하여 공곡도 향상 방안을 제시하였다. 제시된 시추 전 방안은 1) 다단식 시추와 보호 케이싱 설치, 2) 시추 장비 위치의 콘크리트 패드 설치, 3) 시추 시작 또는 시추 중 시추 장비에 대한 수평, 수직계를 이용한 측정 및 관리, 4) 적절한 시추 속도 유지 등이었다. 시추 중 공곡 관리 방안으로 드릴칼라나 스테빌라이져를 이용한 공곡 완화가 제시되었다. 그러나 한번 시추공이 휘게 되면 원 상태로 복귀하는 것은 쉽지 않을 뿐 아니라 공기 및 비용 측면에 영향을 미치기 때문에, 시추 전 필요한 작업을 수행하고 지속적인 시추 장비의 수직, 수평 관리와 적정 심도에서의 공곡 검층 등의 관리가 필요한 것을 알 수 있었다.
