1. 서 론
2. 연구 방법
2.1 타워크레인 구조 및 주요 점검 부위 분석
2.2 점검 항목의 드론 및 AI 적용성 평가 기준 설정
2.3 타워크레인 드론 영상 촬영
2.4 손상 유형 분류 체계 수립
3. 연구결과 및 토의
3.1 드론 및 AI 활용 타워크레인 외관검사 점검 항목 정의
3.2 AI 모델 개발을 위한 손상 유형 체계화
3.3 드론 및 AI 기반 외관검사의 적용성 분석
3.4 AI 학습 데이터 구축을 위한 정의서 활용 방안
4. 결 론
1. 서 론
고용노동부(Ministry of Employment and Labor, MOEL)에 따르면, 2025년 상반기 기준 우리나라 산업재해 사망자는 총 1,120명으로 전년 대비 8.4% 증가하였으며, 이 중 건설업이 189명(42.1%)으로 업종별 최다를 기록하였다(MOEL, 2025a). 사망의 주요 원인은 떨어짐(34.1%), 끼임(9.1%), 물체에 맞음(8.7%) 등으로 대부분이 고소작업 및 기계‧설비 운전 중 발생하는 것으로 보고되었다. 또한 국토안전관리원(Korea Authority of Land & Infrastructure Safety, KALIS)의 2024 국토 안전 통계 연보에 따르면, 국내 건설 현장 사고 중 약 75%가 건축 분야로 가장 높은 비중을 차지하고 있으며, 이 중 건설기계 관련 사고는 전체의 5.7%에 불과하지만 사망사고 비중은 21.7%에 달해 건설기계 사고의 위험성을 보여준다(KALIS, 2024).
특히 건설기계 중 타워크레인(tower crane)은 고층 건축물 시공에 필수적인 장비로, 마스트(mast)·지브(jib) 등의 주요 구조부 손상(균열, 부식, 휨 등)이나 체결 불량으로 인한 전도 및 붕괴 사고가 빈번하게 보고되고 있다. 실제로 국내 여러 건설현장에서 마스트 및 턴테이블(turntable) 체결 불량, 기초부 침수, 부식, 전기‧기계장치 결함 등 구조적 손상이 원인으로 지목된 사고가 발생하였다(Maeil Safety News, 2020). 또한 2023년 여주시 물류센터 공사 현장에서는 타워크레인 점검 중 작업계획서 미준수와 상부 구조물 지지볼트 체결 불량으로 인한 인양 중 구조물 이탈 사고가 발생해 근로자가 사망하였다(Safety First News, 2023). 이처럼 타워크레인 관련 사고는 매년 발생하고 있으며, 이를 예방하기 위해 주기적인 안전점검이 수행되고 있으나, 현재 점검은 대부분 근접 육안검사(visual inspection) 방식으로 이루어진다. 육안검사의 경우 검사자가 접근 가능한 부위에 한정되어 수행되므로 작업자의 안전 위험과 점검 효율 저하의 한계가 존재한다.
최근에는 드론(Unmanned Aerial Vehicle, UAV) 촬영 기반 원격 점검 기술과 AI 영상 분석 기술의 발전으로, 다양한 구조물에 대한 비접촉식 외관검사 자동화 연구가 활발히 진행되고 있다(Forkan et al., 2022, Ameli et al., 2023, Liang et al., 2023). 예를 들어, 철제 송전탑의 부식 탐지(Savino et al., 2025, Barreiro et al., 2022), 항만 크레인의 표면 열화 분석(Chen et al., 2019), 컨테이너 크레인의 구조 건전성 모니터링(De Arriba López et al., 2024) 등 다양한 인프라 구조물에 UAV–AI 기반 외관검사 기술이 적용되고 있다. 또한 Yang et al.(2025)은 이러한 기술을 종합적으로 분석하여, UAV-AI 기술의 고위험 건설기계로의 확장 가능성을 제시한 연구도 보고된 바 있다.
그러나 이러한 UAV-AI 기반 외관검사 연구들은 주로 부식이나 표면 결함 등 단일 손상 유형 탐지에 집중되어 있으며, 손상 유형의 세분화, 점검 항목의 표준화, AI 학습 데이터셋 구축 체계화에 대한 연구는 미흡한 수준이다. 특히 타워크레인을 대상으로 한 연구는 거의 이루어지지 않아, AI 기반 자동점검을 위한 데이터 구축과 손상 정의 체계가 부재한 실정이다.
따라서 본 연구는 타워크레인을 대상으로 드론과 AI를 활용한 비접촉 외관검사 체계를 구축하는 것을 목표로 한다. 이를 위해 타워크레인의 주요 구조부(기초부, 마스트, 텔레스코픽 케이지, 턴테이블, 운전실, 카운터붐, 메인붐, 훅블록)를 중심으로 표준 점검 항목을 정의하고 손상 유형을 체계화하였다. 본 연구는 기존 인프라 구조물 중심의 UAV–AI 외관검사 연구를 타워크레인이라는 고위험 건설기계로 확장하고, 손상 유형 정의 및 점검 항목 표준화를 체계적으로 제시했다는 점에서 학술적·기술적 의의가 있다.
2. 연구 방법
2.1 타워크레인 구조 및 주요 점검 부위 분석
타워크레인은 구조와 기능적 특성에 따라 10개의 주요 구조 부위, 즉 기초부(foundation), 마스트(mast), 브레싱(bracing), 안전플랫폼(access platform), 텔레스코픽 케이지(telescopic cage), 턴테이블, 운전실(operator’s cabin), 카운터붐(counter jib), 메인붐(main jib), 훅블록(hook block)으로 구성되어 있다. 각 구성요소는 서로 다른 임무를 수행하며, 구조적 건전성과 작동 안전성 확보는 타워크레인의 안전성에 직접적인 영향을 미친다. Fig. 1은 실제 타워크레인의 사진과 도면을 통해 각 구성요소를 시각적으로 나타낸 것이다.
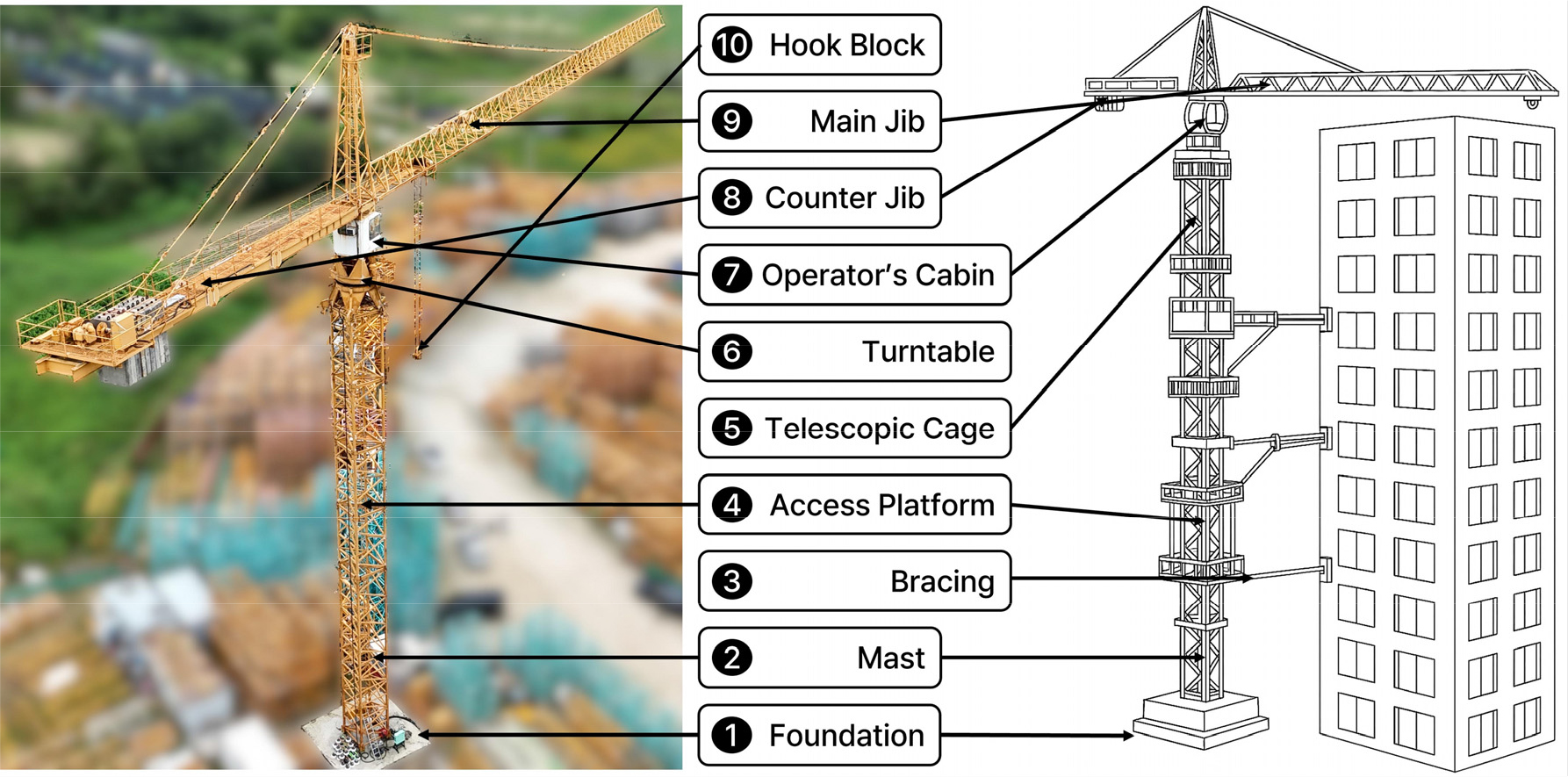
Fig. 1.
Structure and main inspection components of a tower crane
타워크레인의 각 구성요소별 점검 항목을 도출하기 위해, 본 연구에서는 건설기계관리법의 시행규칙과 건설기계 검사 기준(MOLIT, 2025), 한국산업안전보건공단(Korea Occupational Safety and Health Agency, KOSHA)의 기술 지침서(KOSHA, 2022, KOSHA, 2012), 산업안전보건기준에 관한 규칙(MOEL, 2025b), 안전작업가이드 및 안전점검표(KOSHA, 2019), 안전관리자 교육자료(Promecha, 2024), 그리고 국토안전관리원의 재해사례집(KALIS, 2024)을 종합적으로 검토하였다. 이를 통해 각 부위별 법정 점검 항목 및 현장 실무 점검 기준을 비교 분석하여 실제 사고 사례에서 빈번히 관찰된 결함 요인을 반영하여 항목을 작성하였다. 도출된 점검 항목은 이후 2.2절에서 제시하는 드론 및 AI 적용성 평가 기준에 따라 적용 가능성을 검토하였으며, 동시에 2.4절의 손상 유형 분류 체계 수립을 위한 기초 자료로 활용되었다.
2.2 점검 항목의 드론 및 AI 적용성 평가 기준 설정
타워크레인의 각 구성 요소별 점검 항목에 대하여 육안검사 가능 여부, 드론 검사 필요성, AI 적용 가능성의 세 가지 기준으로 평가하였다. 각 항목은 높음(○), 중간(△), 낮음(✕)의 3단계의 척도를 기반으로 평가하였다. 먼저 드론 검사 필요성의 경우, ‘○ 높음’은 검사자가 직접 접근하기 어렵거나 시야 확보가 제한된 부위로, 드론 촬영을 통해 육안검사를 대체할 수 있는 항목을 의미한다. ‘△ 중간’은 검사자가 접근은 가능하거나, 드론 영상을 통해 확인되는 시각적 특징이 불분명하거나 조명 또는 거리 등 환경 제약이 존재하는 항목이다. ‘✕ 낮음’은 타격 검사나 수동조작 등 직접적인 접촉 검증이 필요한 항목으로, 드론을 활용한 외관검사로는 대체 불가능한 경우를 의미한다.
다음으로, AI 적용 가능성은 드론으로 촬영된 영상 데이터를 활용하여 손상, 이상 징후, 구성요소 존재의 유무 등을 자동으로 인식할 수 있는 정도를 기준으로 나누었다. ‘○ 높음’은 균열, 부식, 부품의 유무 등과 같이 영상에서 명확한 형태적 특징, 색상 변화 또는 패턴 차이를 통해 인식이 가능한 손상 유형이다. ‘△ 중간’은 AI가 인식할 수 있는 특징은 존재하지만, 조명, 해상도, 촬영 거리 등 환경 조건에 따라 탐지 성능이 변동될 가능성이 있는 항목이다. ‘✕ 낮음’은 AI가 인식할 수 있는 특징이 모호하거나, 내부 결함 또는 전기적 이상 등과 같이 영상 데이터만으로 탐지가 불가능 항목이다.
2.3 타워크레인 드론 영상 촬영
타워크레인의 드론 영상 촬영은 여주시 가남읍 하귀리에 위치한 타워크레인 야적장에서 수행되었다(Fig. 2). 촬영에는 DJI Mavic 3E 드론이 사용되었으며, RGB 광학 카메라(해상도 5280 × 3956)를 탑재하여 고해상도 이미지를 획득하였다. 비행 방법은 타워 마스트 구간에서는 자동비행, 메인붐 및 카운터붐 구간에서는 수동비행을 병행하여 구조물 형상과 부위별 접근성을 고려한 효율적인 촬영 경로를 구성하였다. 전체 비행 시간은 약 27분이었으며, 총 1,335장의 이미지를 촬영하였다. 촬영은 마스트 하부에서 상부 방향으로 진행하였고, 이어서 턴테이블, 운전실, 메인붐 및 카운터붐 등 상부 구조물을 다양한 각도와 거리에서 추가 촬영하였다. 특히, 자동비행 구간에서는 사전 지정된 경로를 기반으로 반복 촬영이 가능하도록 설정하였다. 또한, AI 기반 영상 분석에 영향을 미칠 수 있는 배경 요소의 간섭을 최소화하기 위해, 부위별로 촬영 각도와 방향을 달리하였다. 예를 들어, 마스트 구간은 카메라를 상향 조정하여, 마스트 연결부 및 볼트 손상 부위를 명확히 식별할 수 있도록 촬영하였으며, 메인붐 구간은 지면 장애물과 구조물이 함께 촬영되지 않도록 아래에서 위 방향으로 경사 촬영하여 구조물과 배경을 명확히 구분하였다.

Fig. 2.
Field operation of the DJI Mavic 3E drone during tower crane inspection at the Yeoju storage yard
2.4 손상 유형 분류 체계 수립
본 연구에서는 드론을 활용하여 촬영 가능한 손상 유형을 체계적으로 분류하고, 각 손상 유형의 정량적 특성과 탐지 난이도, 적용 가능한 AI 탐지 방식(Detection, Segmentation, Anomaly Detection 등)을 분석하였다. 또한, 기존 문헌자료, 드론 영상 분석 결과, 교육자료(Promecha, 2024), 사고사례(KALIS, 2024, Jeong, 2024, Korea Construction Safety Institute, 2025) 등을 종합하고, 국제표준(API and ASME, 2016, ASME, 2023, AWS 2016, CEN, 2018, IEC, 2016, ISO, 1998, ISO, 2012, ISO, 2013, ISO, 2016a, ISO, 2016b, ISO, 2017, ISO, 2023)에 제시된 허용치와 평가 방법을 참고하여 정량기준을 설정하였다. 이를 기반으로 타워크레인 외관검사에 적합한 표준화된 손상 유형 정의 체계를 제안하였다.
2.4.1 드론 기반 탐지 가능 손상 유형
타워크레인의 각 구성요소에서는 균열(crack), 부식(corrosion), 휨(bending) 등 외형적 이상과 연결 부품(볼트, 핀 등)의 결손, 유압 장치의 누유, 전력 계통 관련 이상 등 다양한 형태의 손상이 발생할 수 있다. 기존 안전 검사에서는 이러한 손상을 육안검사, 타격검사, 조작시험 등 인력 중심의 방식으로 수행해 왔다. 반면 본 연구에서는 드론으로 촬영된 고해상도 영상 데이터를 기반으로, 비접촉 방식으로 탐지가 가능한 손상 유형을 선별하였다.
드론 기반으로 탐지가 가능한 손상 유형은 주로 표면에서 시각적 특징이 명확하게 나타나는 유형으로, 균열, 부식, 누유, 부품 결손 등이 이에 해당한다. 이러한 손상들은 색상 변화, 표면 질감, 형상 왜곡, 광택 반사 패턴 등 시각적 지표 특성에 따라 구분이 가능하며, AI 영상 분석 기법을 적용하여 자동 탐지 및 분류가 가능한 항목으로 정의된다.
2.4.2 손상 유형 특형에 따른 AI 분석
손상 유형은 그 시각적 특성과 형태적 특성, 결함 탐지의 목적에 따라 적용할 수 있는 AI 탐지 방식이 달라진다. 기본적으로 시각적 특징이 명확한 경우에는 Bounding Box기반 객체 탐지(object detection) 방식이 적용될 수 있다. 예를 들어 연결 부품 또는 안전장치의 존재 유무, 유압 장치의 누유 여부 등은 Box 형태의 영역 검출을 통해 결함 여부를 효과적으로 확인할 수 있다. 또는, 부식이나 균열 또는 도장 박리 등과 같이 표면의 손상 범위를 세밀하게 구분해야 할 때에는 픽셀 단위의 영역 분할(segmentation) 방식이 적합하다. Segmentation은 손상을 pixel 단위로 탐지하여 손상 면적, 분포, 비율 등 정량적인 지표를 계산할 수 있어, 위험도 평가 및 유지보수 우선순위 결정에 활용할 수 있다. 또한 정상 상태와의 미세한 차이를 분석하여 육안 식별이 어려운 미세 손상이나 초기 결함을 조기 검출하는 경우에는 이상 탐지(anomaly detection)방식이 활용될 수 있다. 이는 구조물의 휨이나 와이어 로프의 꼬임·마모·단선 등을 비정형적 손상 패턴의 탐지에 적용할 수 있다.
3. 연구결과 및 토의
3.1 드론 및 AI 활용 타워크레인 외관검사 점검 항목 정의
본 연구에서는 2장에서 도출한 점검 항목을 기반으로, 타워크레인 10개의 주요 구조 부위별로 드론 및 AI 기반 외관검사가 가능한 세부 항목을 선정하였다. 각 항목은 세부 검사 항목, 드론 검사 필요성, 영상 기반 식별 가능성, AI 적용 가능성 등을 고려하여 정리하였다.
기초부와 훅 블록은 지상에서 접근이 가능하여 드론 검사 필요성은 ‘✕’로 표시하였다. 다만, 이들 부위 또한 영상 기반 AI 분석을 통한 자동 점검 체계의 구성요소로 포함하여 전체 구조물의 점검 항목 정의서를 완성하였다. 이에 기초부와 훅 블록의 점검 항목 정의는 Table 1에 제시하였으며, 그에 대한 이미지 예시는 Fig. 3에 나타내었다.
Table 1.
Inspection items for foundation and hook block components of a tower crane
|
Component
|
Key inspection items
|
Need for drone
inspection
|
AI applicability
|
Applicable AI
detection method
|
|
Foundation
|
① Check for cracks, settlement, or surface damage of the concrete foundation and ensure proper drainage around the base to prevent corrosion or electrical hazards.
|
✕
(Inspectable from
the ground by an
inspector)
|
○
|
Detection,
Segmentation
|
|
② Verify installation of guard fences and door locks for access control, and ensure that safety signs and management labels are properly attached and visible.
|
○
|
Detection
(Optical Character
Recognition, OCR)
|
|
③ Check anchor bolts and bolt caps, loosening, or improper installation at the foundation connection.
|
○
|
Detection,
Segmentation
|
|
④ Inspect the power distribution panel and grounding system to ensure proper insulation and verify that the leakage breaker operates normally.
|
○
|
Detection
|
|
Hook block
|
① Verify that rated load marking.
|
△
(Inspectable from
the ground by an
inspector)
|
○
|
Detection (OCR)
|
|
② Inspect the hook body for cracks, corrosion, or surface wear, and verify that the hook throat opening is within the allowable limit without deformation.
|
△
|
Detection,
Segmentation,
Line Detection
|
|
③ Check that safety latch (hook lock device) is securely installed and operational.
|
△
|
Detection
|
|
④ Check for bolt, key-plate, and pin looseness in the assembly.
|
△
|
Detection
|
|
⑤ Inspect sheaves for groove wear, cracks, or deformation.
|
○
|
Detection,
Anomaly Detection
|
|
⑥ Check the clearance between sheave and cover for abnormal gap.
|
△
|
Anomaly Detection
|
|
⑦ Inspect wire rope anti-disengagement device for proper installation and function.
|
○
|
Detection
|
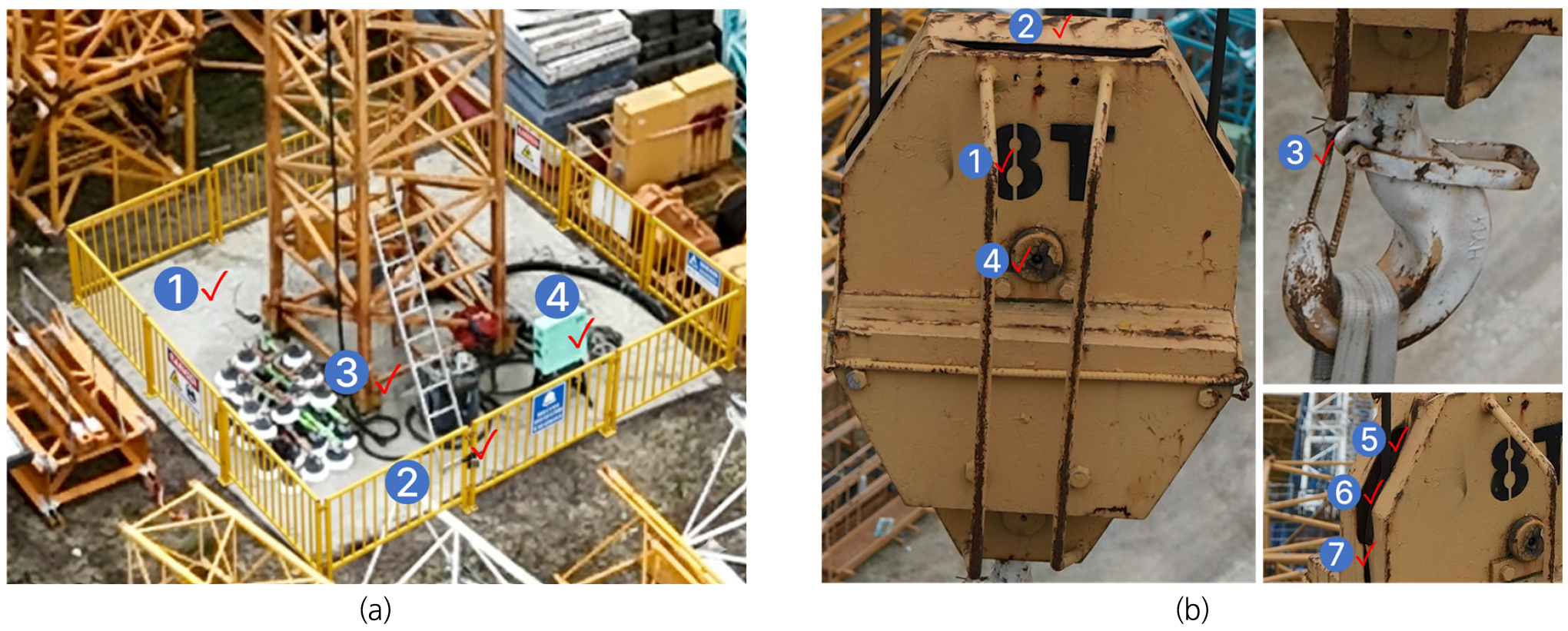
Fig. 3.
Representative inspection items for the foundation and hook block components of a tower crane (a) Foundation, (b) Hook block
마스트는 타워크레인의 중심 구조체로, 전체 하중을 지지하는 부위이다. 구조적 안전성 확보를 위해 균열, 휨, 부식, 용적부 결함, 체결 불량 등과 같은 손상이 주요 점검 대상이다. 마스트는 대부분 기초부 상부에 위치하여 검사관이 운전실로 사다리를 통해 올라가며 확인해야 하므로, 드론을 이용한 영상 점검이 매우 효과적이다. 또한 AI 기반 객체 탐지 및 영역 분할(segmentation) 기법을 활용하면 손상을 자동으로 인식할 수 있다. 마스트 부위의 주요 점검 항목 정의 결과를 Table 2에 정리하였으며, 그에 대한 이미지 예시는 Fig. 4에 나타내었다.
Table 2.
Inspection items for mast of a tower crane
|
Component
|
Key inspection items
|
Need for drone
inspection
|
AI applicability
|
Applicable AI
detection method
|
|
Mast
|
① Inspect for bending, corrosion, cracks, and weld defects.
|
○
(Elevated structure
with limited visibility
to inspectors)
|
○
|
Detection,
Segmentation
|
|
② Inspect mast joints for bolt loosening, missing nuts, or misalignment, verify bolt head orientation for uniform tightening direction, and confirm the presence of bolt caps for corrosion protection.
|
○
|
Detection
|
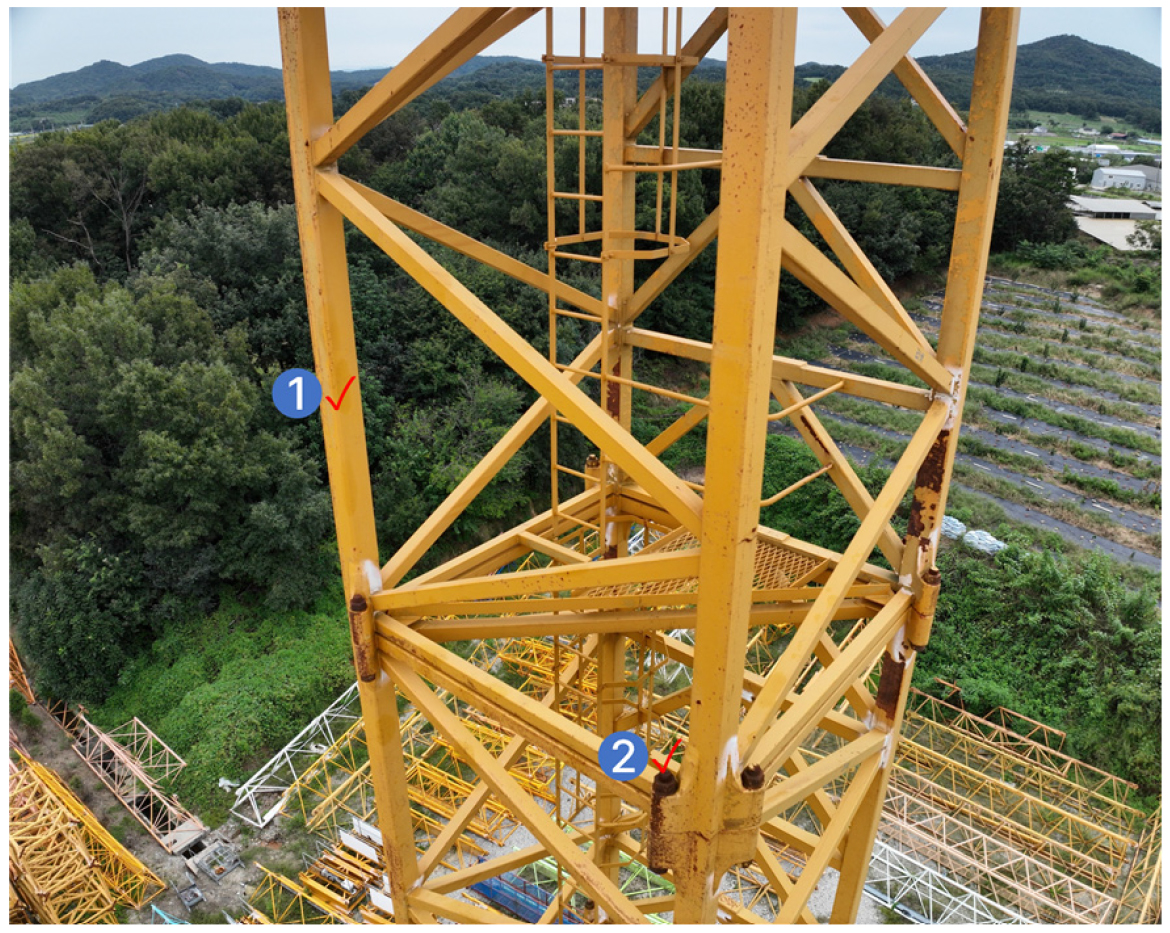
Fig. 4.
Representative inspection items for the mast component of a tower crane
브레싱은 마스트를 건물 구조체에 고정하여 수평하중을 분산시키는 구조 부재로, 연결부 체결 상태, 벽체 고정부의 변형, 부식, 용접결함 등이 주요 점검 항목이다. 특히 브레싱의 볼트 풀림, 핀 누락, 벽체 고정부의 균열·이격은 타워크레인 전도 사고로 직결될 수 있어 정기 점검이 매우 중요하다. 브레싱 부위는 일반적으로 중·상부 구조에 설치되어 접근성이 제한되나, 건물 벽체에 고정된 경우에는 외벽 또는 내부 작업대를 통해 점검이 가능하다. 하지만 드론 영상 기반 AI 분석을 통해 부식, 볼트 풀림, 변형 등의 손상을 자동 탐지할 수 있다. 이에 브레싱 부위의 세부 점검 항목을 Table 3에 정리하였다.
Table 3.
Inspection items for the bracing of a tower crane
|
Component
|
Key inspection items
|
Need for drone
inspection
|
AI applicability
|
Applicable AI
detection method
|
|
Bracing
|
① Inspect for bending, corrosion, cracks, and weld defects.
|
△
(Elevated structure,
but inspectable by an
inspector)
|
○
|
Detection,
Segmentation
|
|
② Inspect wall bracket and anchor bolt for secure installation and no looseness.
|
○
|
Detection
|
|
③ Verify pin and joint connections for missing or loose parts, and ensure correct pin orientation and split-pin installation.
|
○
|
Detection
|
|
④ Inspect welds on bracing joints for defects or discontinuities.
|
○
|
Detection
|
|
⑤ Check for gap or separation between wall bracket and mast.
|
△
|
Detection,
Anomaly Detection
|
|
⑥ Observe rust stains, peeling paint, or watermarks on bracing surfaces.
|
○
|
Detection,
Segmentation
|
|
⑦ Check that the installation position of the wall bracket matches the structural drawing without offset or misalignment.
|
✕
|
-
|
안전플랫폼은 작업자의 이동 및 유지보수 접근을 위해 설치되는 부위로, 안전난간, 발판, 방호울타리 등의 설치 여부가 점검 대상이다. 본 부위는 드론 검사의 필요성은 낮지만 AI 영상 분석을 통해 부식, 난간과 방호울의 설치 여부 등을 자동 인식할 수 있다. Table 4에는 안전플랫폼의 세부 점검 항목을 정리하였으며, 그에 대한 이미지 예시는 Fig. 5에 나타내었다.
Table 4.
Inspection items for the access platform of a tower crane
|
Component
|
Key inspection items
|
Need for drone
inspection
|
AI applicability
|
Applicable AI
detection method
|
|
Access platform
|
① Verify that handrails and toe boards are securely fastened without looseness or deformation, and maintain a minimum height of 1.1 m.
|
✕
(Elevated structure,
but inspectable by an
inspector)
|
○
|
Detection
|
|
② Inspect ladder attachment bolts and clamps for secure installation, and confirm installation of upper guard nets above ladders (≥ 2.2 m height).
|
○
|
Detection
|
|
③ Observe surface rust, paint peeling, or slippery conditions on floor panels.
|
○
|
Detection,
Segmentation
|

Fig. 5.
Representative inspection items for the access platform component of a tower crane
텔레스코픽 케이지는 타워크레인의 마스트 인상 및 해체 작업을 가능하게 하는 장치로, 케이지 내부에는 클라이밍 슈, 유압 장치, 가이드 레일 등으로 구성된다. 이 부위는 높은 곳에 위치해 접근이 어렵고, 사고가 빈번하게 발생하는 부분이기에, 드론과 AI 기반 점검이 유용하다. 드론 영상의 AI 분석을 통해 오일 누유, 부식, 체결 불량 등을 비접촉 방식으로 탐지할 수 있다. Table 5에는 텔레스코픽 케이지의 세부 점검 항목을 정리하였으며, 그에 대한 이미지 예시는 Fig. 6에 나타내었다.
Table 5.
Inspection items for the telescopic cage of a tower crane
|
Component
|
Key inspection items
|
Need for drone
inspection
|
AI applicability
|
Applicable AI
detection method
|
|
Telescopic cage
|
① Inspect welds for cracks, elongation of bolt holes, frame bending, distortion, or misalignment.
|
○
(Elevated structure
with limited visibility
to inspectors)
|
○
|
Detection,
Segmentation,
Anomaly Detection
|
|
② Check pin and bolt connections between mast and cage for tightness and correct positioning.
|
○
|
Detection
|
|
③ Check guide rollers and climbing shoes for wear, deformation, or abnormal contact.
|
○
|
Detection,
Anomaly Detection
|
|
④ Confirm presence of stoppers, deformation of rails, and rope seating conditions.
|
○
|
Detection
|
|
⑤ Verify presence of protective covers and inspect electrical cables or sensors for external damage.
|
○
|
Detection
|
|
⑥ Inspect cylinders and hydraulic hoses for scratches, deformation, cracks, or oil leaks.
|
△
(Elevated structure,
but inspectable by an
inspector)
|
△
|
Detection,
Anomaly Detection
|
|
⑦ Check oil level and contamination, verify pump and motor operation, noise, and vibration.
|
✕
|
-
|
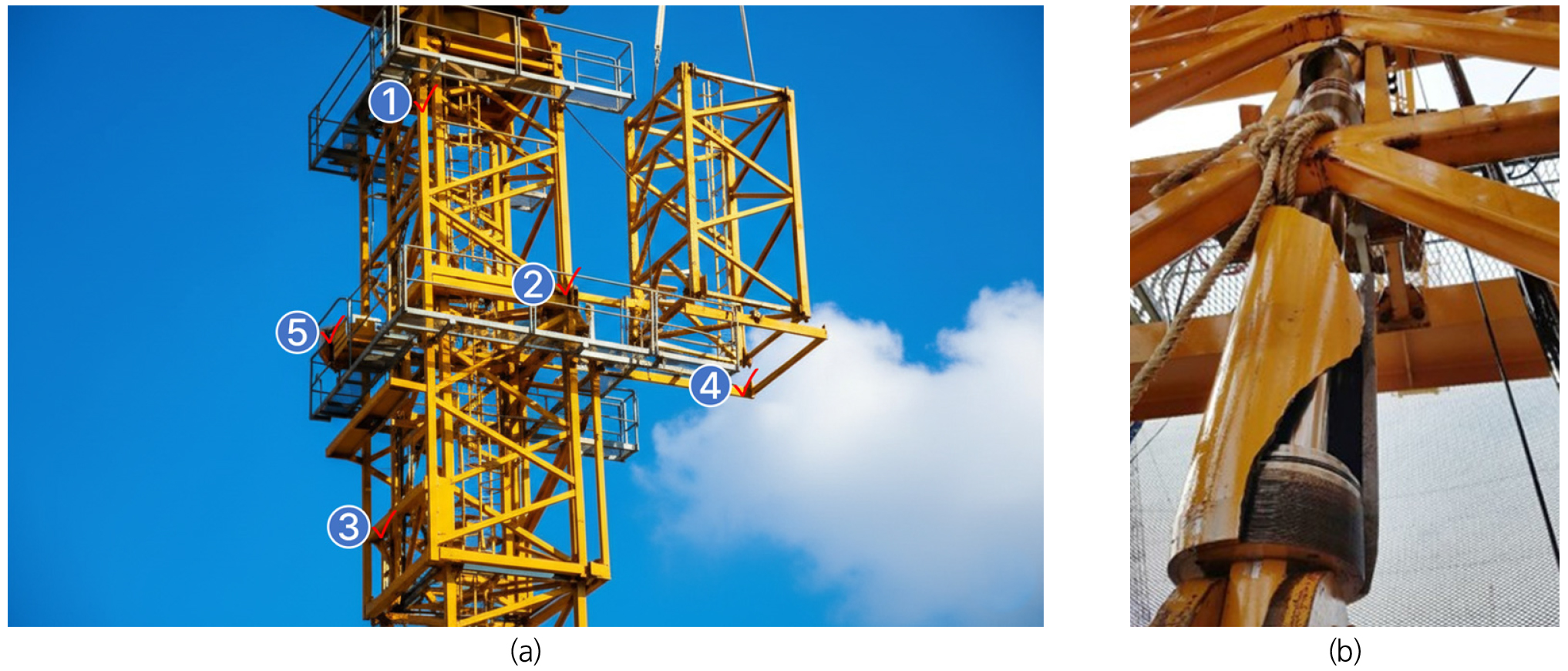
Fig. 6.
Representative inspection items for the telescopic cage component of a tower crane (a) Overview of the telescopic cage, (b) Hydraulic cylinder and hose area showing crack and oil leak conditions (source: Hankook Ilbo, 2018)
턴테이블은 마스트 상부에 설치되어 타워크레인의 회전운동을 담당하는 구동장치로, 선회 베어링, 구동 모터, 감속기, 제동 시스템, 슬립링(slip ring) 등으로 구성된다. 본 부위는 회전부의 윤활 상태, 내부·외부의 볼트 체결, 오일 누유, 전선 및 배선 장치의 손상이 주요 점검 대상이며, 특히 외부 베어링을 포함하여 작업자가 볼 수 없는 부분이 있어 위험성이 높은 영역에 해당한다. 이에 따라 드론 영상 기반 AI 분석을 통해 오일 누유나 윤활 불량 등으로 인한 오염 흔적, 배전선(슬립링)의 손상 등의 이상을 비접촉 방식으로 탐지할 수 있어 점검 효율과 안전성을 확보할 수 있다. Table 6에는 턴테이블의 세부 점검 항목을 정리하였으며, 그에 대한 이미지 예시는 Fig. 7에 나타내었다.
Table 6.
Inspection items for the turntable of a tower crane
|
Component
|
Key inspection items
|
Need for drone
inspection
|
AI applicability
|
Applicable AI
detection method
|
|
Turntable
|
① Check for loosening or missing bolts on internal and external flanges.
|
△
(Elevated structure,
but inspectable by an
inspector)
|
△
|
Detection
|
|
② Inspect for structural deformation or cracks on the turntable frame.
|
○
(Elevated structure
with limited visibility
to inspectors)
|
○
|
Detection,
Segmentation,
Anomaly Detection
|
|
③ Verify motor, gearbox, and brake system for oil leakage or damage.
|
○
|
Detection,
Segmentation
|
|
④ Inspect slip ring and carbon brush for wear, disconnection, or insulation damage.
|
○
|
Detection,
Segmentation
|
|
⑤ Observe lubrication, contamination, or heat marks around the bearing housing indicating overheating.
|
○
|
Detection,
Segmentation
|

Fig. 7.
Representative inspection items for the turntable component of a tower crane
운전실은 타워크레인을 조작 및 제어하는 부위이다. 주요 점검 항목은 난간·출입문 안전 설치, 실외기와 같은 외부 구조물 체결 상태, 조작 및 제어 관련 확인 등이며, 이 중 외관 확인이 가능한 항목은 드론 및 AI 영상 분석을 통해 원격으로 확인할 수 있다. 특히 운전실 외부 구조물의 부식·균열, 안전 난간 설치 여부, 낙하 위험 물체 확인, 표지판 및 경고문 부착 여부는 영상기반 AI 탐지에 적합한 항목이다. 반면, 내부 장비(조작 레버, 스위치, 모니터 등)는 실시간 작동 확인이 필요하므로 AI 기반 자동 탐지는 제한적이다. Table 7에 운전실 구성 요소별 주요 점검 항목과 AI 적용 가능성을 정리하였다. Fig. 8은 운전실의 모습을 보여준다.
Table 7.
Inspection items for the operator’s cabin of a tower crane
|
Component
|
Key inspection items
|
Need for drone
inspection
|
AI applicability
|
Applicable AI
detection method
|
|
Operator’s cabin
|
① Inspect mounting bolts and electrical wiring of external devices (A/C unit, lights, antenna) for loosening, corrosion, or insulation damage.
|
○
(Elevated structure
with limited visibility
to inspectors)
|
○
|
Detection
|
|
② Confirm presence and legibility of safety labels and warning signs on cabin exterior.
|
○
|
Detection (OCR)
|
|
③ Inspect window condition and visibility for cracks, contamination, or obstruction.
|
○
|
Detection,
Segmentation
|
|
④ Check door lock, step, and handle condition for safe access to the cabin.
|
○
|
Detection,
Segmentation
|
|
⑤ Verify proper functioning of operating levers and control pedals.
|
✕
(Inspectable by an
inspector at the Cabin)
|
✕
|
-
|
|
⑥ Check insulation and wiring conditions around control panels and safety switches.
|
✕
|
-
|
|
⑦ Verify indicator lights and instrument gauges for proper function.
|
✕
|
-
|
|
⑧ Check if hook camera monitor displays normally.
|
✕
|
-
|

Fig. 8.
Representative inspection items for the operator’s cabin component of a tower crane
카운터붐은 타워크레인의 균형을 유지하고, 메인붐과 반대 방향으로 하중을 분산시키는 구조 부위이다. 주요 구성요소는, 카운터웨이트, 붐 프레임(안전 난간 및 도보 등), 모터 및 감속기, 브레이크, 와이어 로프 등으로 구성된다. 이러한 부품의 구조적 결함이나 체결 불량은 크레인 전도나 붕괴, 추락사고로 직결될 수 있다. 이때 카운터붐은 작업자가 접근 가능하지만, 고소에 위치하기 때문에 드론 영상 기반 AI 외관 손상 탐지를 활용하면 부식, 균열, 체결 부품 누락, 낙하물 여부 파악 등의 이상을 비접촉 방식으로 탐지할 수 있다. Table 8에는 카운터붐 구성요소별 주요 점검 항목을 정리하였다. Fig. 9는 카운터붐의 주고 구성요소들을 보여주는 사진이다.
Table 8.
Inspection items for the counter jib of a tower crane
|
Component
|
Key inspection items
|
Need for drone
inspection
|
AI applicability
|
Applicable AI
detection method
|
|
Counter jib
|
① Check pin and joint connections for loosening, fatigue cracks, or damage.
|
○
(Elevated structure
with limited visibility
to inspectors)
|
○
|
Detection
|
|
② Inspect handrails and walkway for secure installation and corrosion.
|
○
|
Detection,
Segmentation
|
|
③ Verify counterweight fixation and locking condition.
|
○
|
Detection,
Anomaly Detection
|
|
④ Check motor and gear mounts for secure attachment and oil leakage.
|
○
|
Detection,
Segmentation
|
|
⑤ Check wire rope condition for wear, kink, and anchor fixing.
|
△
|
Detection,
Segmentation,
Anomaly Detection
|
|
⑥ Inspect brake and drum assembly for pad wear, surface damage, or malfunction signs.
|
✕
(Inspectable by an
inspector)
|
△
|
Detection
|

Fig. 9.
Representative inspection items for the counter jib component of a tower crane
메인붐은 타워크레인의 주 하중을 지지하고, 자재를 인양하는 주요 구조 부위로서, 붐 프레임, 지지핀, 훅 트롤리 레일, 와이어로프, 타이로드 등으로 구성된다. 메인붐은 긴 구조와 높은 위치로 인해 작업자의 접근이 어렵고 위험도가 높다. 이에 따라 드론 영상 기반 외관 점검과 AI 영상 분석을 통해 균열, 부식, 트롤리 및 연결 부품 관련 부품 누락 등 다양한 결함을 비접촉 방식으로 탐지할 수 있다. 특히 붐 프레임의 휨, 용접부 균열, 연결 핀 이탈, 로프와 시브 관련 손상, 트롤리 낙하 방지 스토퍼 누락 등은 구조적 안전성에 직접적인 영향을 주는 항목이다. 이러한 항목에 대해 AI 탐지 모델을 적용하면 효율적인 안전 검사 및 모니터링이 가능하다. Table 9에는 메인붐 구성 요소별 점검 항목을 정리하였으며, 그에 대한 이미지 예시는 Fig. 10에 제시하였다.
Table 9.
Inspection items for the main jib of a tower crane
|
Component
|
Key inspection items
|
Need for drone
inspection
|
AI applicability
|
Applicable AI
detection method
|
|
Main jib
|
① Inspect boom frame and weld joints for cracks, deformation, or corrosion.
|
○
(Elevated structure
with limited visibility
to inspectors)
|
○
|
Detection,
Segmentation,
Anomaly Detection
|
|
② Check pin connections and joint angles for loosening or bending over 30°.
|
○
|
Detection
|
|
③ Check tie-rod frame and bolts for corrosion, deformation, or buckling.
|
○
|
Detection,
Segmentation,
Anomaly Detection
|
|
④ Verify end-stopper installation and tightening condition.
|
○
|
Detection
|
|
⑤ Inspect trolley rail, fastening bolts, and sheave assembly for wear or misalignment.
|
△
|
Detection,
Anomaly Detection
|
|
⑥ Inspect sheaves and pins for wear and secure mounting.
|
○
|
Detection,
Segmentation
|
|
⑦ Verify trolley platform and handrail stability, check for loose bolts or vibration.
|
✕
(Inspectable by an
inspector)
|
✕
|
-
|
|
⑧ Check limit-switch and anti-collision device operation.
|
✕
|
-
|
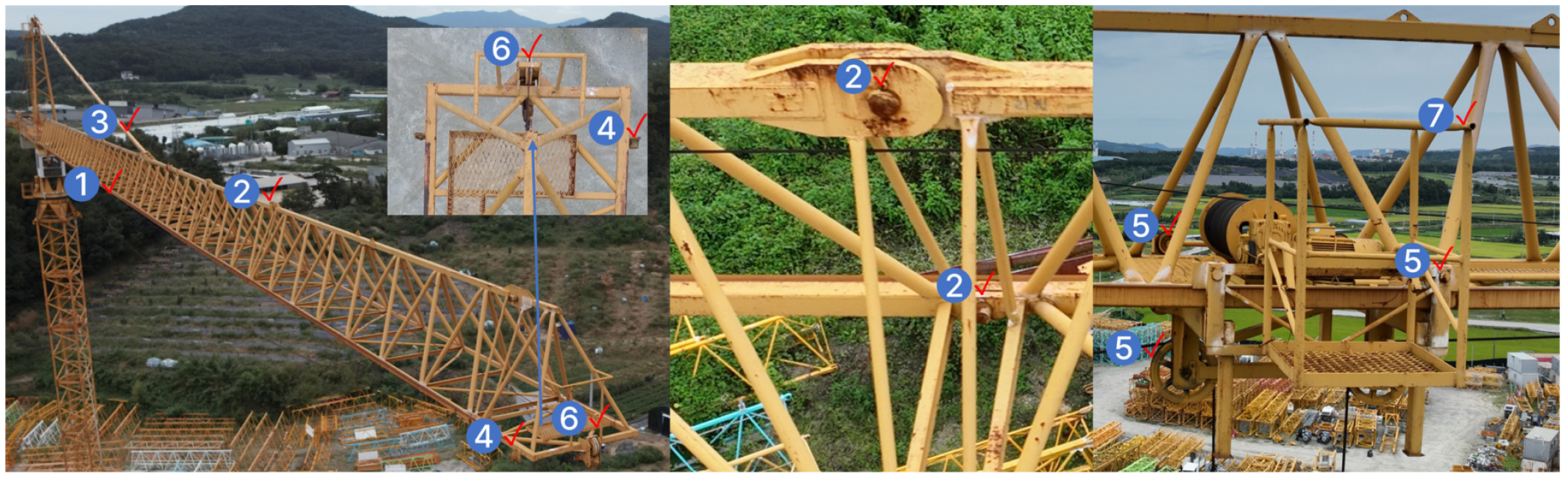
Fig. 10.
Representative inspection items for the main jib component of a tower crane
3.2 AI 모델 개발을 위한 손상 유형 체계화
본 연구에서는 앞서 정리한 타워크레인 외관검사 점검 항목 정의서(Table 1,2,3,4,5,6,7,8,9)를 기반으로, 각 구성요소에서 발생 가능한 손상 유형을 형태적 특징과 시각적 특성에 따라 추출 및 분류하여 손상 유형을 체계화하였다. 또한 각 손상 유형은 AI 탐지의 형태적·시각적 특징을 정의하고, 2.4절에서 제시한 손상 분류 및 기준 설정 절차를 기반으로 손상 정도별 정량 기준을 설정하였으며, 이를 바탕으로 적용 가능한 AI 탐지 유형을 정리하여 Table 10에 손상 유형 정의서를 작성하였다. 손상 유형은 ① 균열 및 파손, ② 부식 및 표면 열화, ③ 변형, ④ 체결 불량, ⑤ 와이어 로프 및 시브 손상, ⑥ 유압, 윤활, 전기 시스템 손상, ⑦ 안전장치 결함 및 부품 손실 등 7개의 대분류로 체계화하였으며, 각 세부 유형별로 AI 영상 탐지에 필요한 특징과 정량 기준을 정리하고 발생할 수 있는 구조 부위를 정의하였다. 특히 손상 특징을 RGB 색차(ΔE), 변위(mm), 각도(°), 면적(cm2) 등의 정량 지표로 표준화하여, 향후 AI 기반 자동 진단모델 개발에 활용가능한 표준화된 학습 기준을 제시하였다.
Table 10.
Integrated definition and AI-oriented classification of tower crane damage types
|
Category
|
Damage type
|
Morphological & visual
characteristics
|
Quantitative criteria
|
Main components
|
AI applicability
|
Crack,
fracture
damage
|
Frame crack
|
Linear fracture with high gray-scale
contrast and clear separation
|
Length ≥ 10 mm,
Width < 1 mm
|
Mast, Main Jib,
Counter Jib
|
Detection,
Segmentation
|
|
Weld crack
|
Linear discontinuity, uneven brightness
and pattern, distinct boundary line
|
Length ≥ 5 mm
|
Mast, Main Jib,
Counter Jib,
Telescopic Cage
|
Detection,
Segmentation
|
|
Metal fracture
|
Localized breakage with sharp edges and
specular contrast
|
Fracture depth ≥ 50% of member
thickness OR visible complete
separation
|
Block, Counter
Jib, Sheave,
Turntable
|
Detection,
Segmentation
|
Corrosion,
surface
deterioration
|
Corrosion
|
Non-uniform surface area, decreased RGB
intensity, rough texture
|
Ri ≥ 3, Area ratio ≥ 1 %,
ΔE ≥ 5 and/or
RGB intensity ↓ ≥ 10 %
|
All exposed
metallic structures
|
Detection,
Segmentation
|
|
Rust stain
|
Local color distortion, irregular stain
pattern, uneven tone
|
ΔE ≥ 5, area ratio ≥ 5 %
|
Detection,
Segmentation
|
|
Paint peeling
|
Irregular surface separation, low
saturation, reduced reflectance
|
Flaking ≥ 3 or area ratio ≥ 5 %
|
Detection,
Segmentation
|
Deformation,
bending,
geometric
deviation
|
Structural
bending
|
Axis deviation, curvature distortion,
visible bending of vertical/horizontal
members
|
Angular deviation ≥ 5°, Linear
displacement ≥ 5 mm,
Out-of-plumb > 1:500
|
Mast, Main Jib
|
Anomaly
Detection, Line
Detection
|
Frame
deformation
|
Asymmetrical frame geometry, misaligned
lattice structure, torsion or twist
|
Deflection ≥ L/500
(beam span ratio)
|
Telescopic Cage,
Access Platform
|
Anomaly
Detection, Line
Detection
|
Member
deflection
|
Downward curvature along beam length,
sagging profile under load
|
Horizontal δ ≥ L/600,
Vertical δ ≥
L/700(tower/bridge)
|
Main Jib,
Counter Jib
|
Anomaly
Detection, Line
Detection
|
Joint,
connection
defect
|
Loose bolt
and nut
|
Positional offset, partial rotation mark,
reflection irregularity
|
Offset ≥ 2 mm
|
Mast, Turntable
|
Detection
|
Missing bolt
and nut
|
Absent fastener, missing clamping part
|
-
|
Mast, Main Jib
|
Detection
|
Pin looseness /
disengagement
|
Missing connection, reflection or
shading inconsistency
|
Clearance ≥ 2 mm or
split pin spread angle < 30°
|
Telescopic Cage,
Main Jib,
Counter Jib
|
Detection,
Anomaly
Detection
|
Wire rope
& sheave
damage
|
Wire wear
|
Linear wear, rough surface, irregular
brightness pattern
|
Diameter reduction ≥
3.5–6.5 % of nominal
(depending on rope type)
|
Counter Jib,
Hook Block
|
Detection,
Anomaly
Detection
|
Wire
misalignment
|
Nonlinear overlapping, irregular
winding interval
|
Pitch deviation >
2 mm or kink presence
|
Counter Jib
|
Line Detection,
Segmentation
|
|
Sheave wear
|
Circular groove damage, crack on
rim surface
|
Groove depth ↓ ≥ 20 %,
Groove diameter >
110 % of rope diameter
|
Main Jib,
Hook Block
|
Detection,
Segmentation
|
Hydraulic,
lubrication,
electrical
damage
|
Oil leakage
|
Diffused reflection loss, surface stain,
color change, Wet or glossy pattern
|
Color ΔE ≥ 10,
Stain area ≥ 5 cm2 |
Turntable,
Counter Jib
|
Detection,
Segmentation
|
Water ingress
(slip ring)
|
Irregular wet spots, moisture marks,
increased reflectivity
|
ΔE ≥ 10
|
Turntable
|
Detection,
Segmentation
|
Wiring
damage
|
Linear rupture, color discontinuity,
insulation exposure
|
Exposed wire length ≥ 10 mm
OR insulation damage ≥
20% of circumference
|
Foundation,
Mast, Turntable
|
Detection
|
Safety device,
component
loss
|
Missing
stopper
|
Missing object, absence of rubber pad
|
Binary Presence/Absence Check
|
Main Jib
|
Detection
|
|
Missing cap
|
Point loss, change in local reflectivity
|
-
|
Mast
|
Detection
|
Missing
handrail
|
Linear structural discontinuity,
broken outline
|
-
|
Counter Jib
|
Detection
|
Label, warning
damage
|
Area loss, text unreadable or
contaminated
|
Legibility ≤ 80 %
|
Foundation,
Operator’s Cabin
|
Detection(OCR)
|
Foreign object,
drop hazard
|
Irregular protrusion, abnormal contour,
asymmetric shading
|
Area ≥ 5 cm2 |
Operator’s Cabin,
Counter Jib
|
Detection
|
3.3 드론 및 AI 기반 외관검사의 적용성 분석
앞서 정의된 타워크레인의 구성요소별 외관 점검 항목(Table 1,2,3,4,5,6,7,8,9)과 손상유형 정의서(Table 10)를 바탕으로, 드론 영상 촬영 및 AI 영상 분석 기술의 적용 가능 범위를 정량적으로 평가하였다. 평가 항목은 각 구성요소에 대한 드론 검사의 필요성과 AI 적용 가능성의 두 지표로 구분하였다.
드론 검사의 필요성은 각 부위별로 ‘○ 높음(100점)’, ‘△ 중간(50점)’, ‘× 낮음(0점)’의 3단계 척도를 적용하여 수치화하였으며, 이를 통해 전체 점검 항목 중 드론 기반 점검으로 대체 가능한 비율을 산정하였다. AI 적용성 역시 동일한 척도를 사용하여 각 항목의 AI 탐지 가능성을 정량화하고, 평균값으로 환산하였다. 이렇게 산정된 두 지표를 기반으로 구성요소별 드론 대체성과 AI 분석 적용성을 통합적으로 비교하였으며, 그 결과를 Table 11에 제시하였다.
Table 11.
Feasibility analysis of drone and AI application for each tower crane component
|
Component
|
Need for drone
inspection
|
AI applicability
|
Feature
|
Necessity of Drone/
AI Inspection
|
|
Foundation
|
0.0
|
100.0
|
Easily accessible from the ground for direct inspection.
|
Low
|
|
Hook block
|
50.0
|
71.4
|
External surfaces and mechanical connections can be effectively inspected from the ground.
|
Moderate
|
|
Mast
|
100.0
|
100.0
|
Limited accessibility to outer tower sections.
|
High
|
|
Bracing
|
50.0
|
78.6
|
Visually accessible from adjacent structures.
|
Low
|
|
Access platform
|
0.0
|
100.0
|
Easily inspected by maintenance personnel during climb-up
|
Low
|
|
Telescopic cage
|
85.7
|
78.6
|
Located in high-altitude areas and requires periodic observation
|
High
|
|
Turntable
|
90.0
|
90.0
|
Contains critical elements that are not directly visible from the operator’s view.
|
High
|
|
Operator’s cabin
|
50.0
|
50.0
|
Exterior components (guardrails or dropped-object) risks can be visually assessed.
|
Moderate
|
|
Counter jib
|
83.3
|
83.3
|
Rear section requiring periodic visual inspection.
|
High
|
|
Main jib
|
75.0
|
68.8
|
High elevation component requiring periodic drone-based inspection.
|
High
|
분석 결과, 드론 검사가 필요하지 않다고 평가된 기초부 및 안전 플랫폼을 제외한 나머지 검사 항목들의 드론 검사 필요성은 평균 73점, AI 적용성은 평균 77.6점으로 나타났다. 특히 마스트, 텔레스코픽 케이지, 턴테이블, 카운터붐, 메인붐은 드론 촬영과 AI 분석 모두에서 높은 효율성을 보이는 고소부 구조로, 향후 타워크레인 외관검사의 자동화 우선 적용 대상으로 평가되었다. 반면, 기초부와 안전플랫폼은 검사자가 직접 접근 가능한 부위로서 드론 및 AI 기반 검사의 필요성이 상대적으로 낮게 분석되었다. 또한 운전실의 경우 외부 난간이나 낙하 방지 장치 등은 AI 영상 분석이 유효하지만, 내부 제어장치 및 스위치 등은 여전히 인력 중심의 직접 점검이 필요한 것으로 나타났다. 훅 블록 또한 외부 손상이나 부품 결손 탐지에는 AI 분석이 효과적이지만, 구조적 특성상 타격 검사 및 작동 시험 등 기계적 점검은 인력에 의존해야 함을 확인하였다.
종합적으로, 타워크레인의 고소부 구조일수록 드론 및 AI 기술의 적용성이 높았으며, 검사자가 직접 접근 가능한 지상 구조에서는 그 필요성이 낮은 경향을 보였다.
3.4 AI 학습 데이터 구축을 위한 정의서 활용 방안
본 연구에서 제시한 타워크레인의 구성요소별 외관 점검 항목 정의서(Table 1,2,3,4,5,6,7,8,9)와 손상 유형 정의서(Table 10)는 AI 학습용 영상 데이터 구축의 기준으로 활용될 수 있다. 각 구성요소별 점검 항목은 객체 인식 및 영역 분할 단계에서의 클래스 정의 기준으로, 손상 유형 정의서는 AI 학습 데이터의 라벨링 지침으로 적용된다. 특히, 손상 유형 정의서의 정량적 특성은 영상 내 손상 부위의 정량적 경계값으로 활용될 수 있어 데이터셋 구축 및 AI 모델의 학습 일관성을 높이고, 탐지 신뢰도를 정량적으로 평가할 수 있는 기반을 제공한다. 또한, 본 정의서를 활용하면 데이터셋 구축 단계에서의 라벨링 일관성 확보뿐 아니라, 향후 AI 모델의 학습 및 추론 과정 및 성능 검증 단계에서도 활용이 가능하다.
4. 결 론
본 연구에서는 타워크레인 외관검사에서 드론 및 AI 영상 분석 기술을 효과적으로 활용하기 위한 표준 점검 항목 정의 체계와 손상 유형 분류체계를 정립하였다. 타워크레인의 10개 주요 구성요소를 대상으로 법정 검사 기준, 기술 지침, 사고 사례 등을 종합 분석하여 구성요소별 세부 점검 항목을 도출하고, 각 항목에 대해 드론 접근성과 AI 적용 가능성을 정량적으로 평가하였다.
또한 외관검사 과정에서 발생할 수 있는 손상 유형을 형태적·시각적 특징에 따라 7개 대분류로 체계화하고, 각 유형별 정량적 기준을 제시함으로써 AI 기반 영상 인식 및 학습 데이터셋 구축에 활용 가능한 표준 정의 체계를 마련하였다. 이 결과는 향후 타워크레인뿐만 아니라 다른 건설기계나 대형 구조물의 외관검사 분야에도 확장 적용이 가능하며, AI 객체 탐지용 데이터셋 구축, 스마트 점검 플랫폼 개발, 건설기계 안전진단 자동화 기술 고도화를 위한 핵심 기초 자료로 활용될 수 있다.
향후 연구에서는 본 연구에서 정의한 점검 항목 및 손상 유형 체계를 기반으로 드론 촬영 데이터를 활용한 AI 학습 데이터 구축 및 탐지 모델 검증을 수행할 예정이다. 또한 다양한 조명, 기상, 촬영 거리 조건에서의 AI 인식 성능을 평가하고, 이를 최적화하기 위한 알고리즘 개발로 연구를 확장할 계획이다.


