

1. 서 론
2. LiDAR의 개요
3. 암반 불연속면 추출 기법
3.1 삼각망 구조의 영역 확장
3.2 점 구조의 영역 확장
3.3 법선 방향을 이용한 영역 확장
3.4 RANSAC(Random Sample Consensus)
4. LiDAR를 이용한 암반 불연속면 추출의 연구 사례
4.1 삼각망 구조의 영역 확장 방법을 활용한 암반 불연속면 추출
4.2 RANSAC 알고리즘을 활용한 암반 불연속면 추출
5. 결 론
1. 서 론
암반은 수많은 불연속면과 무결암으로 이루어져 있어 터널 등의 지하 구조물을 시공하는 경우, 구조물의 안정성을 확보하기 위해 주변 암반에 대한 물리적, 역학적 조사가 필수적이다. 특히 무결암의 강도는 불연속면을 포함하는 암반의 강도보다 크기 때문에 암반의 안정성은 암반 내에 존재하는 불연속면의 특성에 지배적인 영향을 받는다. 즉, 구조물의 안정성을 위협하는 주변 암반의 변형, 붕괴 등은 불연속면에서 주로 발생하게 되므로 암반의 역학적 특성을 분석하기 위해서는 이러한 불연속면의 특성을 충분히 파악할 필요가 있다.
암반의 특성을 분석하기 위해 지금까지는 대개의 경우 수작업을 통한 암반 분류가 수행되어 왔다. 그러나 이러한 암반 분류 작업을 위해서는 숙련된 인력이 필수적이며, 접근 불가능하거나 대규모 지질조사 현장에서는 많은 한계점이 존재한다. 따라서 이러한 문제점을 해결하기 위해 LiDAR(Light Detection And Ranging)를 활용한 암반 불연속면 정보 획득에 관련된 연구가 국내외에서 수행되어 왔으며, 이를 바탕으로 암반 분류로의 적용에 대한 시도가 꾸준히 시도되고 있다(Kim and Kemeny, 2009; Li et al., 2019; Kong et al., 2020).
일반적으로 LiDAR를 이용한 암반 분류를 수행하기 위해서는 LiDAR 촬영으로 획득된 point cloud에서 암반 불연속면을 추출하는 작업이 필수적인데, 이 과정에서 적용되는 표면 재구성 및 추출 알고리즘의 적용방법에 따라 추출된 결과물이 상이하거나(Lee and Jeon, 2016), 또는 수작업에 의한 암반 조사를 완전히 대체할 만큼의 신뢰성을 확보하지 못하여 현장에 적용하기 어려운 상황이 발생하는 경우가 종종 보고되고 있다. 이러한 이유로 인해 국내의 경우 현재까지 LiDAR 촬영은 지하광산 갱내도 작성 및 대규모 사면 도시 정도에만 이용되고 있는 정도이며, 대부분의 도로 및 철도용 지반구조물을 위한 암반 분류는 아직까지도 숙련된 기술자의 직접적인 조사에 의존하고 있는 실정이다. 따라서 LiDAR 촬영을 활용한 암반분류의 신뢰도와 정확도를 향상시킴으로써 다양한 지반구조물 구축 현장에 적용할 경우, 인력 소요 감소는 물론 신속하고 간단한 지보 대책의 수립이 가능해짐에 따라 암반 조사 기간의 단축 및 비용 절감에 큰 도움이 될 것이다. 이를 위하여 본 연구에서는 LiDAR 촬영으로부터 획득된 point cloud를 이용하여 암반 불연속면을 추출하는 기법과 암반 사면을 모사하는 기법 등을 조사하여 각 기법에 대해 설명하고, 분석함으로써 LiDAR에 의한 암반분류법의 적용성 향상을 도모코자 한다.
2. LiDAR의 개요
LiDAR는 레이저 펄스를 지표 등의 대상물에 주사하고 반사된 레이저 펄스의 도달시간을 측정하여 장비와 대상물과의 거리를 계산하고 측정 대상의 공간 위치 좌표 정보를 추출하는 기술이다. LiDAR의 개발은 1930년대 탐조등 빛의 산란 세기를 통하여 공기 밀도 분석을 위해 처음으로 시도되었다. 하지만 1960년대에 레이저의 발명과 함께 비로소 본격적인 개발이 시작되었다(Weitkamp, 2006). 이후 LiDAR는 광학, 전기 및 레이저 기술의 발달에 큰 영향을 받아 발전하였으며, 현재에 이르러서는 정밀한 데이터를 획득할 수 있으며 소형화가 가능하다는 장점을 바탕으로 자율주행차, 증강현실, 스마트 IoT, 드론 산업 등 첨단 산업의 핵심 기술로 각광받고 있다(Choe, 2017).
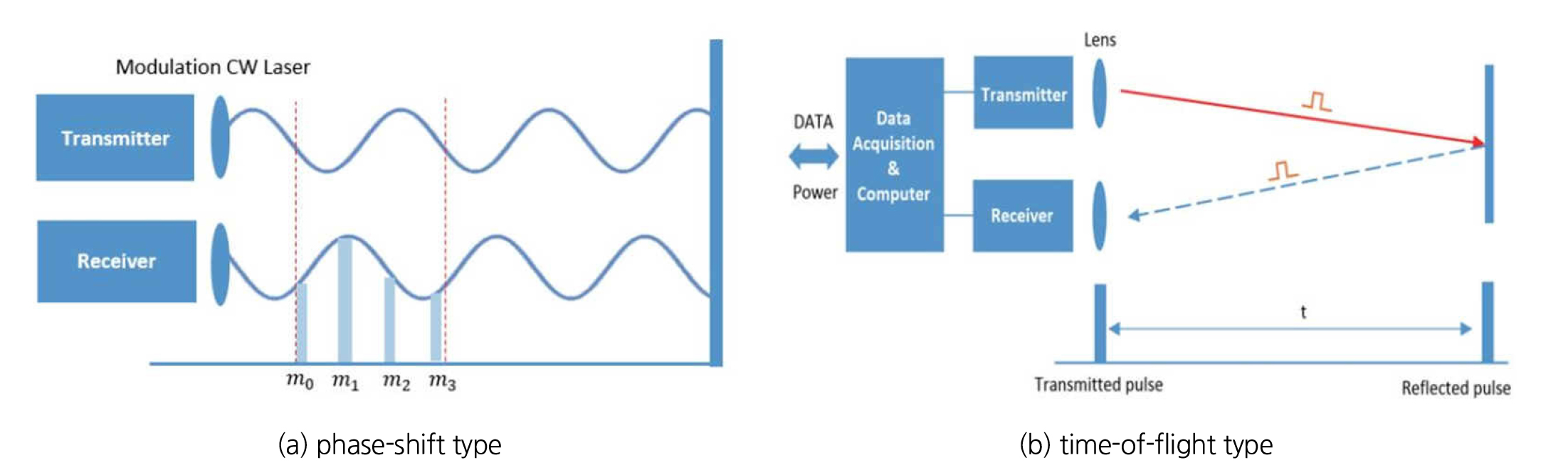
LiDAR는 대상물을 향해 조사된 레이저가 반사되어 다시 돌아오는 시간의 측정을 통해 거리를 계산하는 time-of-flight 방식과, 특정한 주기를 갖는 레이저 파형을 대상물에 조사하여 반사되어 돌아오는 레이저 파형의 위상 차이를 통해 거리를 계산하는 phase-shift 방식으로 분류된다(Fig. 1). 두 형식의 장비를 비교하였을 때, time-of-flight 방식은 수 km의 측정 가능 거리를 가지며, phase-shift 방식의 경우 time-of-filight 방식보다 더 빠른 측정속도를 갖는다는 장점이 있지만 수백 미터의 상대적으로 짧은 측정 가능 거리를 갖는 단점이 있다. 하지만 LiDAR 촬영을 통한 암반 사면 조사의 경우 최대한의 정확도를 확보하기 위해 수십 ~ 수백 미터 이내의 비교적 근거리에서의 촬영이 요구되므로, 비용, 측정거리 및 정확도를 고려하였을 때, 현장에 적합한 다양한 LiDAR를 선택하여 사용하고 있다.
3. 암반 불연속면 추출 기법
암반 사면의 공학적 특성을 분석하기 위해서는 불연속면의 방향, 간격, 거칠기, 절리군의 개수 등 불연속면의 정보를 취득하는 것이 필수적이다. Point cloud에서 이러한 정보들을 획득하기 위해서는 표면에서 절리면을 추출하고, 각 절리면에 대한 세밀한 조사가 수행되어야 한다. 하지만 LiDAR를 통한 암반 사면의 조사는 육안으로 절리면 구분이 가능한 수작업과는 다르게 point cloud와 사진 등의 간접적이고 제한적인 정보를 통해서만 절리면 정보의 획득이 가능하다. LiDAR 촬영을 통해 획득한 point cloud에서 불연속면을 추출, 및 분류하고 이들의 공학적 특성을 분석하기 위한 알고리즘은 매우 중요한데, 이러한 암반 불연속면의 추출 기법에는 대표적으로 삼각망 구조의 영역 확장, 점 구조의 영역 확장, 법선 방향을 이용한 점의 영역 확장, RANSAC 등이 있다.
3.1 삼각망 구조의 영역 확장
Kemeny et al.(2006)이 제안한 삼각망 구조의 영역 확장은 우선 point cloud를 삼각망으로 재구성하고 삼각망을 이루고 있는 삼각요소들을 활용하여 암반 불연속면을 추출하는 방법이다. 삼각망 구조의 영역 확장 기법을 사용해서 point cloud에서 암반 불연속면을 추출하기 위해서는 point cloud를 다수의 삼각형의 집합으로 구성하는 작업이 선행되어야 하는데, 이 삼각형의 집합을 삼각망이라고 한다. 이때 삼각망을 구성하는 알고리즘에는 여러 가지 기법들이 제안되고 있으며 각각의 알고리즘의 차이에 따라 최종 결과물이 상이할 수 있다. Lee and Jeon(2016)의 경우 삼각망의 구성 방법에 따른 암반 사면 조사 결과의 차이를 연구한 바가 있으며, 해당 연구에서 적용된 삼각망 구성 방법으로는 들로네 삼각 분할 기법과 BPA(Ball Pivoting Algorithm)가 있다.
들로네 삼각 분할(Delaunay triangulation; Delaunay, 1934) 기법은 점들을 삼각형으로 연결하여 표면을 재구성할 때 모든 삼각 요소들의 외접원 내에 해당 삼각형을 구성하는 점 이외에 어떤 점도 속하지 않도록 하는 방법이다. 이 방법은 삼각망을 구성하고 있는 삼각형의 내각의 최솟값이 최대가 되도록 함으로써 각각의 삼각형들이 최대한 정삼각형에 가깝게 삼각망이 구성된다는 특징을 가지고 있다. 3차원의 경우에는 Point cloud를 면적을 가지는 표면으로 구성하는 대신, 부피를 가지는 사면체로 구성하여 사면체에 외접하는 구 안에 어떠한 다른 점도 포함하지 않도록 구성하는 알고리즘을 따른다.
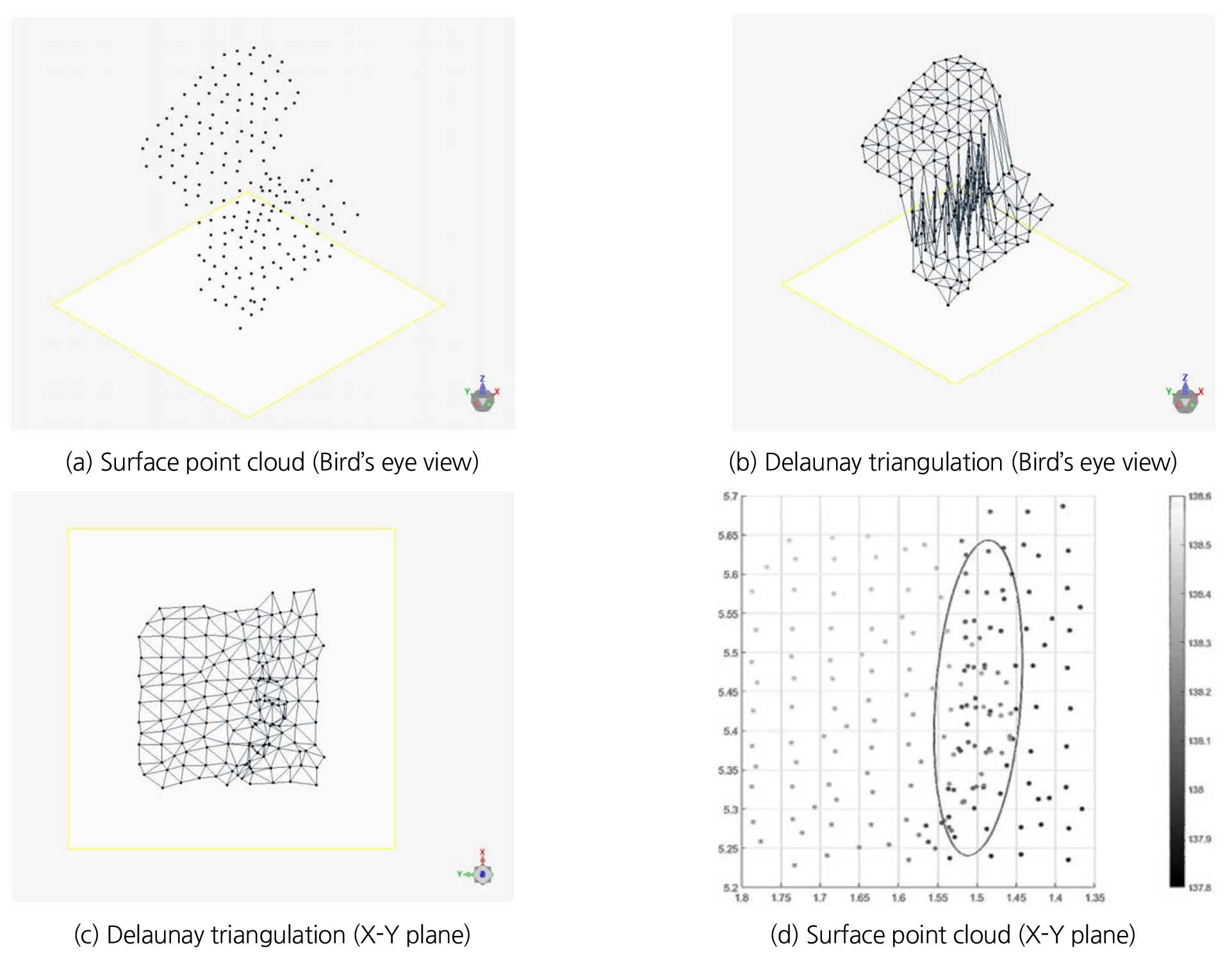
LiDAR의 암반공학적인 활용에 있어 암반 사면을 조사하고 암반 불연속면의 정보를 취득하기 위해서는 건축물이나 문화재 등과 같이 촬영 대상물이 3차원의 부피를 가지는 사면체의 집합으로 표현되는 것이 아니라 2.5차원의 삼각망 구성을 통해 사면이 표현된다. 이때, 2.5차원 들로네 삼각 분할 방법은 Point cloud를 한 평면에 투영하고 2차원 들로네 삼각 분할 기법으로 삼각망을 구성한 다음, 다시 투영 이전으로 되돌려 고저 차가 발생하도록 표면을 구성하는 메커니즘을 적용하게 된다. 2.5차원 들로네 삼각 분할을 통해 고품질의 표면을 획득하기 위해서는 평면에 Point cloud를 투영하기 위한 각도를 세심하게 결정해야 하는데, 평면에 투영하는 각도와 실제 암반 사면에 광원이 도달하는 각도가 일치하는 경우에는 결과물의 품질이 우수하나, 특정 지점에서 방사형으로 레이저를 투사하는 LiDAR를 적용할 경우 들로네 삼각 분할 방식으로는 왜곡 현상의 발생 없이 Point cloud를 면적을 가지는 표면으로 완벽하게 재구성하기는 곤란한 경우가 발생할 수 있다(Fig. 2).
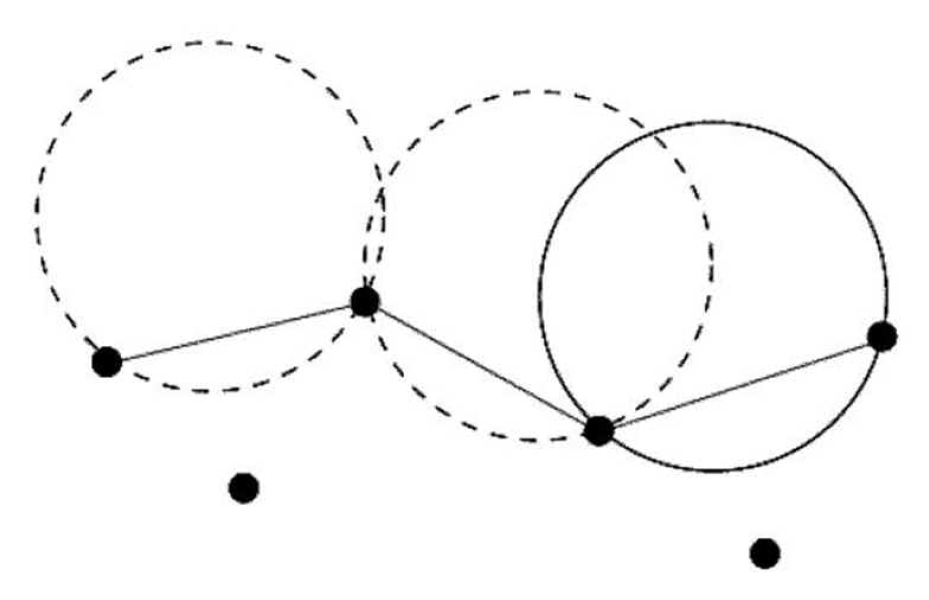
3차원 들로네 삼각 분할은 조밀한 Point cloud를 삼각망으로 구성함에 있어, 과도한 계산 시간 소요 및 높은 컴퓨터 성능이 요구된다는 단점이 있다. Bernardini et al.(1999)은 작업 결과물의 품질을 향상시키고 들로네 삼각 분할 방식의 단점을 보완하고자 새로운 삼각망 구성 알고리즘인 BPA(Ball Pivoting Algorithm)를 제안하였다. BPA는 Point cloud가 충분히 조밀하여 점들의 사이로 ρ-ball(반지름이 ρ인 구)이 통과할 수 없다고 가정한다. ρ-ball이 삼각망을 구성하는 세 개의 점 외에 다른 점에 닿지 않았을 때, 이때 세 개의 점이 하나의 삼각망을 이루고 ρ-ball은 Point cloud 위를 구르면서 새로운 삼각망을 탐색하여 모든 점이 삼각망으로 구성될 때까지 반복하는 기법이다(Fig. 3).
이때 ρ-ball 내부에는 어떠한 점도 존재하지 않다는 조건을 만족해야 하며, 구의 반지름 ρ는 연구자의 재량에 따라 결정할 수 있다. 센서가 회전하면서 방사형으로 레이저를 투사하는 LiDAR 촬영의 특성상 샘플링을 거치지 않은 데이터는 점들의 중첩으로 인해 point cloud 표면에서의 점의 밀집도가 부분별로 상이하게 나타난다. 이때 연구자는 구의 반지름 ρ의 변화를 통해 점의 밀집도를 고르게 분포하도록 할 수 있다.
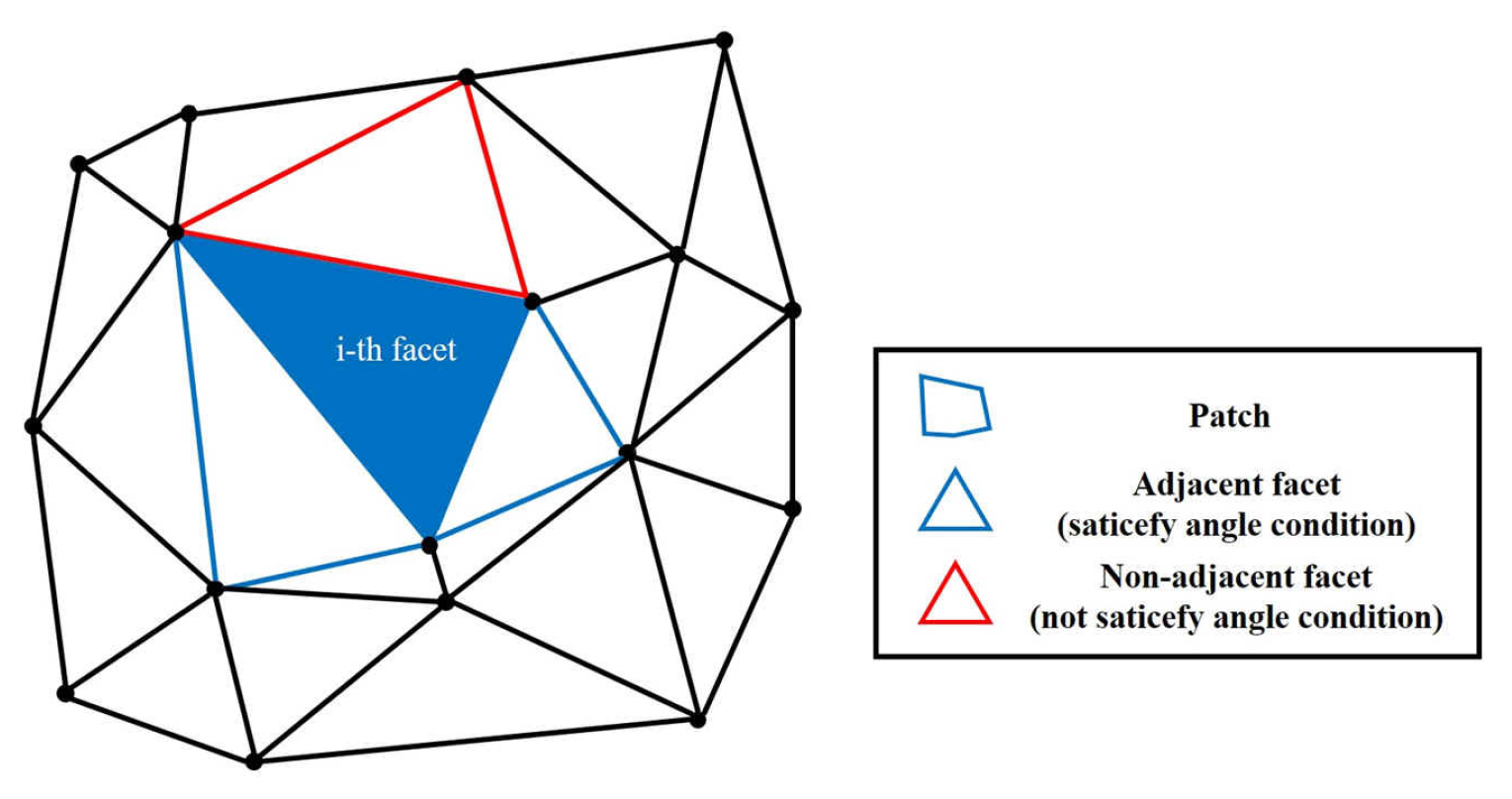
위에 서술된 두 가지 방법 외에도 삼각망을 구성하는 알고리즘은 여러 가지가 있으며, 삼각망 구조의 영역 확장 방법은 point cloud를 삼각망으로 구성한 뒤에 다음과 같은 순서로 진행된다. 우선 삼각망의 임의의 삼각 요소를 선택하고 이에 대해 일정 각도 조건을 만족하는 인접 삼각 요소를 병합한다(Fig. 4). 이 과정을 병합되는 삼각 요소가 존재하지 않을 때까지 반복하고, 이때 병합된 삼각 요소의 개수가 일정 개수 이상인 경우 병합된 삼각 요소들을 패치(Patch)라고 하며 이를 불연속면으로 확정하게 된다. 전체 삼각망에 이 과정을 반복하여 생성된 패치들을 활용하여 암반 불연속면의 정보를 획득하게 된다. Kemeny et al.(2006)은 삼각망 구조의 영역 확장에서 패치 형성 조건을 인접 삼각 요소들이 이루는 각도를 10°로 하고, 병합된 패치의 삼각 요소 개수가 최소 5개 이상인 경우에 하나의 패치로 보았다.
3.2 점 구조의 영역 확장
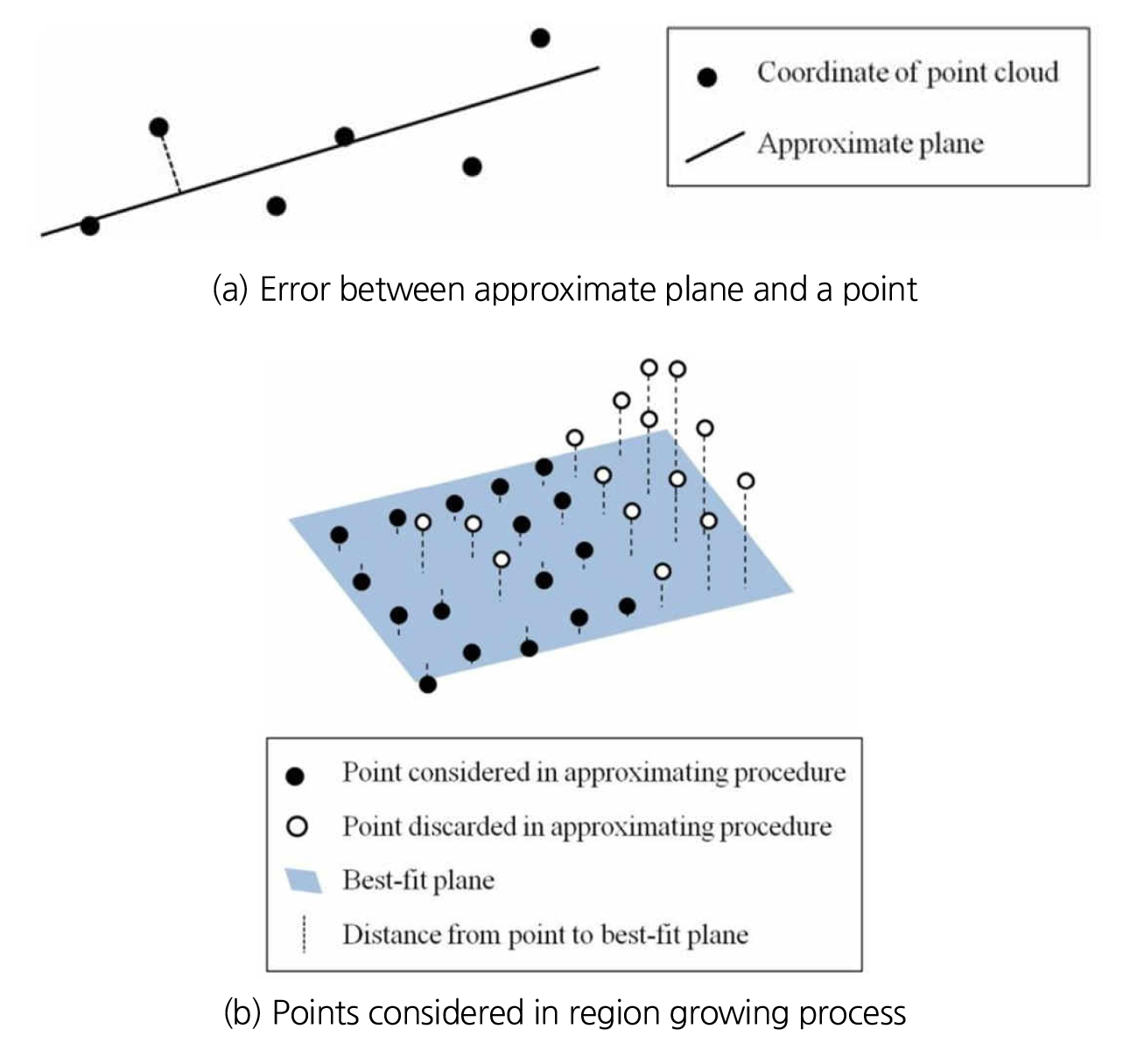
평균 오차 제곱(mean square error, MSE)은 점과 근사 평면 사이 거리의 제곱의 평균으로, 점의 분포가 근사 평면에서 벗어날수록 큰 값을 갖는다는 특징이 있다(Fig. 5(a)). Poppinga et al.(2008)은 평균 오차 제곱을 활용하여 point cloud의 영역 확장(region growing)과 방향성 계산에 대한 기법을 제안하였다. 점 구조의 영역 확장은 임의의 세 개의 시작점으로부터 근사 평면을 구성하고 조건에 부합하는 인접 점들을 병합시켜 점 집합을 확장시키는데, 집합의 점의 수가 일정 수준 이상인 경우 삼각망 구조의 영역 확장과 유사하게 이를 하나의 평면으로 간주한다.
Oh(2011)는 이 방법을 처음으로 암반의 불연속면 추출에 활용하였는데, 이때의 병합 조건은 평균 오차 제곱과 점과 근사 평면까지의 거리로 하였다. 근사 평면의 법선 방향은 평면상에 분포하는 점들의 무게중심으로부터 구해진다. 병합 조건을 만족시키는 새로운 점을 발견할 때마다 평균 오차 제곱을 갱신하고 최종적으로 점의 수가 100개 이상인 경우 충분히 평면에 걸쳐 불연속면이 형성된 것으로 간주하였다. 또한 새로운 점을 점 집합에 병합시키기 위한 두 가지 조건 중 하나인 점과 근사 평면까지의 거리는 평균 오차 제곱만을 조건으로 하였을 때 오류의 발생 가능성을 낮출 수 있다고 제안하였는데, 병합과정에서 평균 오차 제곱의 경우 점 집합이 커질수록 새로 추가되는 점의 오차가 다소 낮게 반영될 가능성이 있다. 하지만 점과 근사 평면 간의 거리는 점의 개수와 무관하게 독립적으로 계산되므로 서술된 두 조건의 상호 보완을 통해 다수의 점을 병합한 경우에도 점 개수의 증가에 의한 오차를 최소화시켜 평면과의 근사 정도를 정밀하게 파악할 수 있다는 것을 강조한 바 있다(Fig. 5(b)).
3.3 법선 방향을 이용한 영역 확장
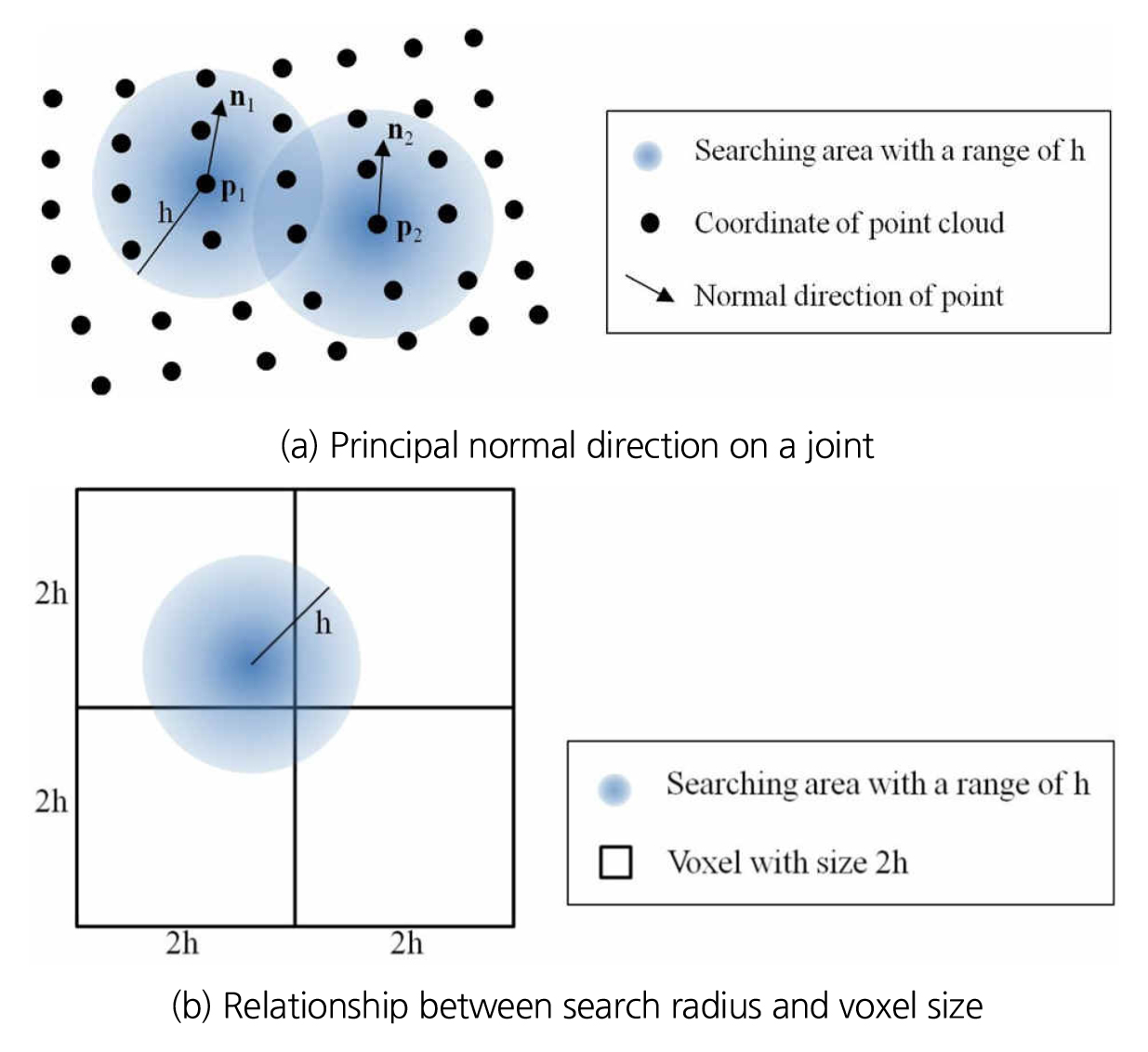
Oh(2011)는 Poppinga et al.(2008)이 제안한 점 구조의 영역 확장 기법을 암반 불연속면에 적용함과 동시에 유사한 방법인 법선 방향을 이용한 점의 영역 확장 기법도 함께 제안한 바 있다. 즉, 이 기법에서는 암반 사면에 대해서 LiDAR 촬영을 통해 획득한 point cloud의 점들이 가지는 법선 방향은 불연속면 상의 방향으로 가정하며, 이 법선 방향은 점 구조의 영역 확장 기법과 동일하게 평면을 이루고 있는 점들의 무게중심에서 구해지고, 또한 중심점으로부터 일정 반경 이내의 모든 점이 계산에 사용되는 과정을 포함하고 있다(Fig. 6(a)). 이때, 각 점의 방향성을 구한 뒤 Fuzzy K-means clustering analysis를 이용하여 점들을 유사한 절리군에 배정하게 되며, 동일 절리군에 배정된 point들을 병합하여 절리면을 생성한다.
또한 Oh(2011)에 의하면, point의 방향성을 계산하기 위해 전체 point cloud에서 일정 반경 이내의 모든 점을 검색하는 것은 비효율적이므로 point cloud를 가상의 육면체인 복셀(voxel)에 나누어 배정함으로써, 해당되는 점들을 검색하는 것이 아닌 중심점 근처의 복셀 만을 이용해서 검색하는 Roncella and Forlani(2005)의 원리를 적용한 바 있다. 즉, 평면상의 중심점에서 반경 h 이내의 점을 검색할 때, 한 변이 2h인 복셀 구조를 구축하면 검색 영역이 전체 point cloud에서 중심점 근처의 4개의 복셀로 한정되게 되는 방법이다(Fig. 6(b)).
3.4 RANSAC(Random Sample Consensus)
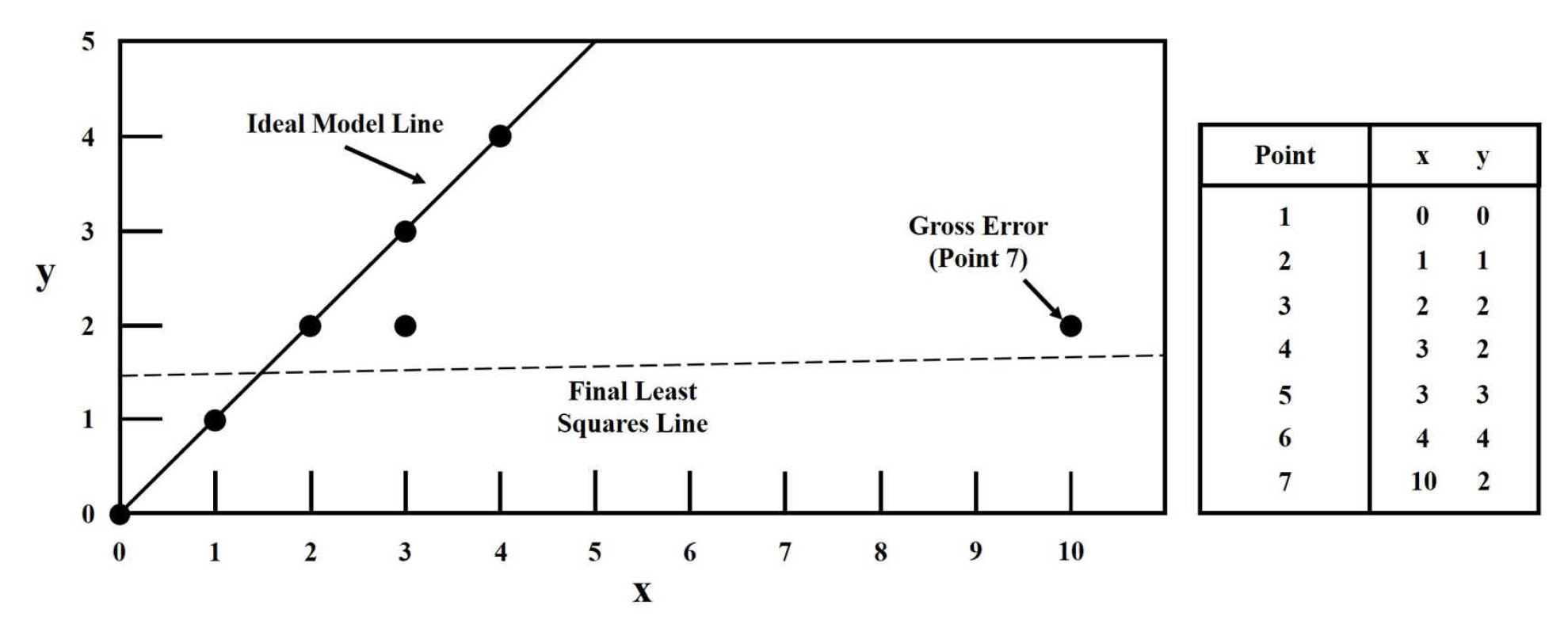
RANSAC은 데이터의 비정상 분포영역에 해당하는 outlier들을 필터링하고 정상 분포인 inlier들을 활용하여 전체를 가장 잘 대표하는 모델을 찾는 알고리즘이다(Fischler and Bolles, 1981). 따라서 RANSAC 알고리즘에서는 획득된 데이터로부터 임의로 샘플 데이터를 추출한 뒤 이 샘플 데이터들을 만족하는 모델을 구하는 과정을 취하고 있다. 이때, 이 모델들과 가까이에 있는 데이터들의 개수가 많다면 이를 저장해둔 뒤 이 과정을 여러 번 반복하며, 이후 가장 높은 경향을 띠는 모델을 최종 결과로 획득하게 된다. 관측 혹은 실험을 통해 획득한 데이터에는 대개 noise와 threshold를 넘어선 비정상 영역의 값들이 다수 존재하게 되며, 데이터 전체를 사용해서 모델을 획득하는 최소자승법 등의 경우 outlier들이 데이터의 분석을 방해하게 되므로(Fig. 7), RANSAC 알고리즘은 이러한 outlier를 필터링해서 이상적인 모델을 예측하도록 하는 유용한 도구이다.
RANSAC 알고리즘은 두 가지 파라미터를 설정해야 하는데, 데이터 샘플링을 몇 번 반복할 것인지를 결정하는 파라미터 N과, inlier와 outlier를 구분하는 파라미터 T이다. RANSAC의 성공 여부는 N, T의 두 가지 파라미터를 어떻게 설정하느냐에 달려 있는데, 데이터 샘플링은 N번의 시도 중 최소한 한번은 inlier 안에서 이루어져야 하며, outlier를 구분하기 위한 T의 범위가 너무 넓을 경우 데이터의 변별력이 취약할 수 있고 너무 좁을 경우에는 모델 형성이 제대로 되지 않는 문제점이 나타날 수 있다.
Roncella and Forlani(2005)는 이 알고리즘을 처음으로 암반 point cloud 자료의 평면 탐지에 활용하였다. 평면 탐지에서의 RANSAC 알고리즘은 먼저 point cloud 상의 임의의 세 점을 반복적으로 선택하여 이 세 점이 이루는 평면의 방향을 구한다. 이 과정을 반복하여 가장 잦은 빈도를 갖는 방향을 구하고 이 방향을 갖는 평면을 추출한다. point cloud에서 추출된 평면의 점들을 제거하면 새로운 RANSAC 단계가 실행되고 새로운 평면이 추출된다. 따라서 확률적으로 가장 높은 빈도를 갖는 평면이 우선적으로 추출되고 가장 적은 빈도를 갖는 평면을 맨 마지막에 추출하여 point cloud를 평면들의 집합으로 재구성한다. RANSAC 알고리즘을 활용한 절리면 추출작업은 높은 정확도를 보였지만, 매우 불규칙한 표면을 갖는 암반의 특성상 두 가지 파라미터 N과 T를 결정하기 위해 다수의 시행착오가 요구되어 과정의 자동화는 용이하지 않은 것으로 나타났다.
4. LiDAR를 이용한 암반 불연속면 추출의 연구 사례
3장에서 서술한 대표적인 암반 불연속면의 추출 기법으로는 삼각망 구조의 영역 확장, 점 구조의 영역 확장, 법선 방향을 이용한 점의 영역 확장, RANSAC 등이 있다. 삼각망 구조의 영역 확장은 point cloud 처리에 있어 암반공학적인 특성을 반영한 상용 소프트웨어인 Split-FX 및 Lee and Jeon(2016)의 연구에도 적용되는 등 국내외적으로 널리 사용되고 있으며 RANSAC의 경우 국내에서는 아직 활용된 사례가 없으나 García-Cortés et al.(2012) 등 국외 연구에서는 활발히 적용되고 있는 방법이다. 하지만 이 외의 점 구조의 영역 확장, 법선 방향을 이용한 점의 영역 확장의 두 가지 방법은 아직 연구 사례가 부족하여 추가적인 연구가 필요한 실정이다. 따라서 최근까지 국내외에서 널리 적용되었으며, 연구 사례가 풍부한 삼각망 구조의 영역 확장 및 RANSAC을 활용하여 point cloud에서 암반 불연속면을 추출한 사례를 분석하였다.
4.1 삼각망 구조의 영역 확장 방법을 활용한 암반 불연속면 추출
지하 구조물 혹은 사면의 안정성을 파악하기 위해서는 암반 분류를 수행해야 한다. 암반 분류에는 Q 분류법, RMR 분류법 등 여러 가지 방법이 있으나, 공통적으로는 수작업을 통해 수행되어 숙련된 기술자의 작업이 필수적이고 대규모 지질조사에 적용하는 것은 현실적인 어려움이 있다. Lee(2020)는 측정자의 개입을 최소화하고 적은 인력으로 빠르게 암반 분류를 수행하기 위해 LiDAR를 활용한 GSI 암반 분류 연구를 수행하였다.
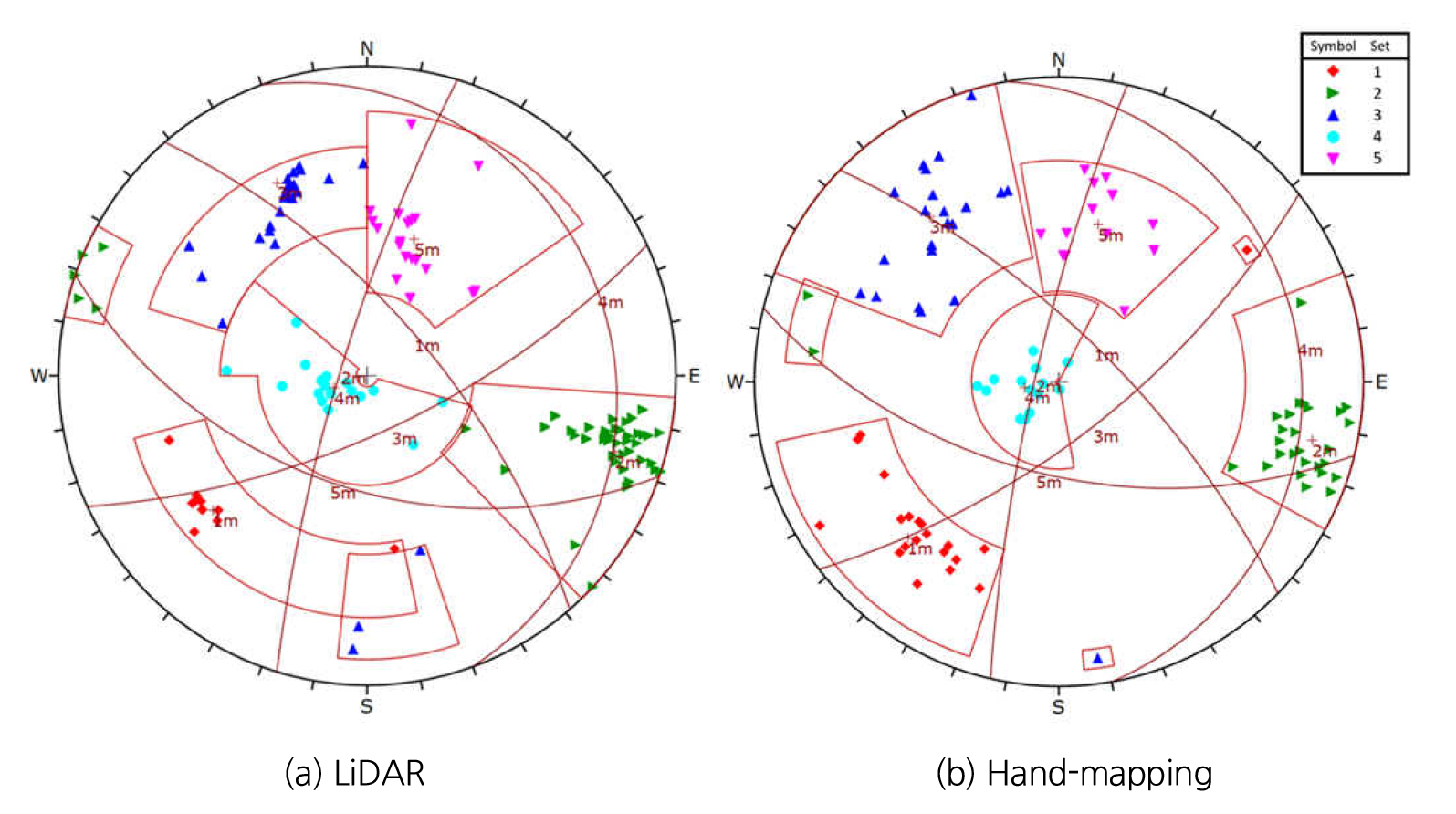
Lee(2020)는 암반 사면을 대상으로 LiDAR 촬영을 수행하고 취득한 point cloud를 바탕으로 불연속면을 추출하고(Fig. 8) 절리면의 방향, 거칠기, 만곡, 절리간격, 블록부피를 산정하여 수작업으로 취득한 결과물과 비교하였다. 이 연구에서 point cloud를 표면으로 재구성하기 위해 사용된 삼각망 구성 알고리즘으로 BPA(Ball Pivoting Algorithm)가 사용되었으며, 불연속면을 추출하는 기법으로는 삼각망 구조의 영역 확장 기법을 활용하였다. 이때 Kemeny et al.(2006)이 제안한 조건(인접각 10°, 병합된 삼각요소 수 5개 이상) 뿐만 아니라 point cloud의 샘플링 간격 조절, 각도 조건을 다양하게 적용하여 최적의 결과물을 획득하고 이를 연구에 활용하였다. Table 1과 Table 2는 point cloud에서 획득한 절리면의 방향 및 암반 분류를 수행하기 위한 파라미터들에 대해 수작업으로 획득한 결과와 비교한 표이며, Fig. 9은 조사 대상 암반 사면을 대상으로 두 가지 방법을 적용하여 취득한 절리들을 stereonet에 도시한 결과이다. 수작업으로 조사한 불연속면의 정보와 point cloud에서 추출된 불연속면의 정보는 유사한 결과를 나타내어 신뢰성이 있는 것으로 판단되었고, Cai et al.(2004)의 연구를 토대로 정량화된 불연속면의 특성을 활용해 GSI 암반 분류를 수행하였으며, 이 과정을 자동화하는 알고리즘을 개발하였다.
Table 1.
Joint orientation measured by LiDAR processing and hand-mapping (Lee, 2020)
Table 2.
Parameters for rock mass classification measured by LiDAR processing and hand-mapping (Lee, 2020)
4.2 RANSAC 알고리즘을 활용한 암반 불연속면 추출
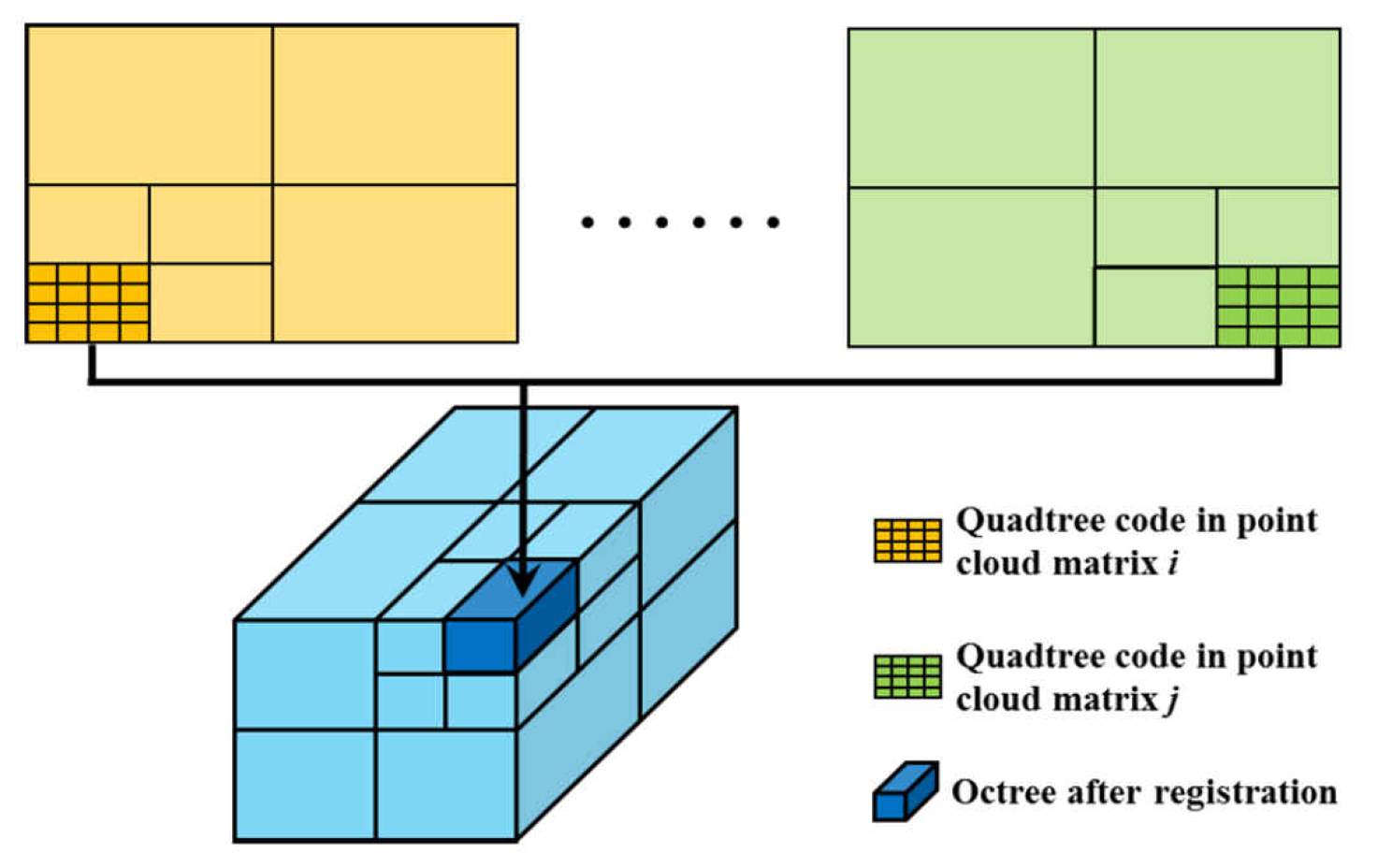
Han et al.(2017)은 고해상도 LiDAR point cloud를 활용하여 효과적인 암반 불연속면을 추출하는 기법을 제안하였다. 이 기법은 point cloud를 계산의 효율성을 증대시키기 위해 Quadtree-Octree 자료 구조로 변환하고, 점들의 법선 벡터를 계산한 뒤, extended RANSAC 알고리즘을 통해 불연속면을 추출한다(Fig. 10). extended RANSAC 알고리즘은 기존의 Roncella and Forlani(2005)가 사용했던 알고리즘과는 약간의 차이점이 있는데, 최소자승법으로 획득된 초기평면과 알고리즘상의 선택된 점을 활용해서 그 둘이 이루는 각도와 거리를 비교하여 다음 RANSAC 알고리즘의 실행을 결정한다는 것이다. 이를 통해 T(Threshold)값 설정의 문제를 보완하여 RANSAC 알고리즘을 활용한 암반 불연속면 추출에 있어서 자동화된 알고리즘의 개발 가능성을 보였다.
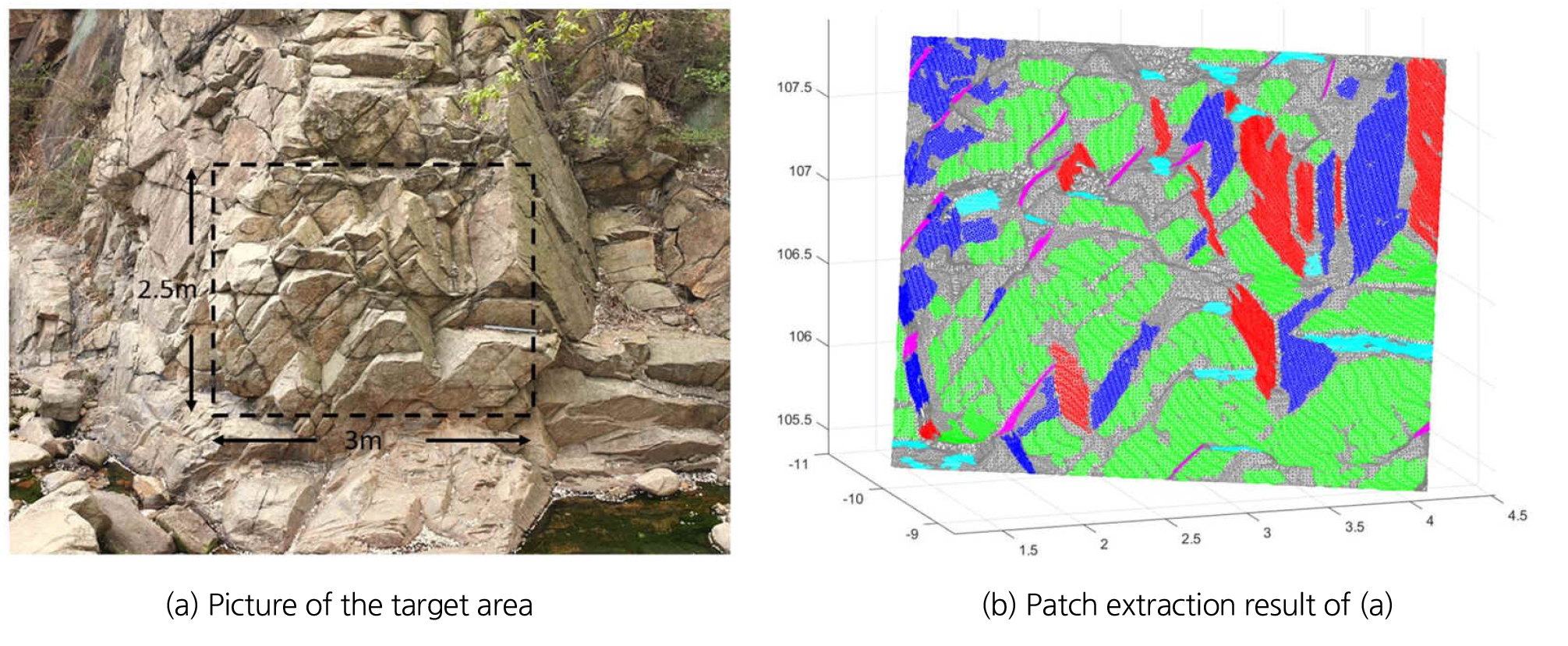
Han et al.(2017)는 중국 우한 지역의 폐광산을 대상으로 수작업으로 획득한 현장 데이터와 RANSAC 알고리즘을 활용한 암반불연속면 추출 결과와 비교한 바 있다. Fig. 11과 Fig. 12는 폐광 현장의 사진과 LiDAR 촬영을 통해 획득한 point cloud, 연구에서 제안된 암반 불연속면 추출 기법으로 추출된 절리군의 그림이다. 4개의 절리군이 존재하고 있음이 뚜렷하게 나타나 있으며, Fig. 12에서 나타난 4개의 절리군에 대해 조사한 경사 방향과 경사각 정보와 수작업으로 획득한 정보를 Table 3에 정리하였다. 수작업으로 획득한 값과 LiDAR 촬영을 통해 획득한 값의 오차를 RMS Error로 계산한 결과 Fernández(2005)의 연구 결과에서 제시한 오차범위 이내로 나타나고 있어, 제안된 기법은 신뢰성이 있는 것으로 판단되었다. 또한, 해당 연구에서는 Riquelme et al.(2014)의 연구 결과와도 비교하였는데, 이들이 제안한 기법을 이용하여 Fig. 13의 암반사면에 대해 불연속면을 추출한 결과, Fig. 14(a)에서와 같이 5개의 절리군 중 4개의 절리군에 대해서는 유사한 경향을 나타내어 신뢰성이 있는 것으로 판단되었지만, J3 절리군에서는 조금 다르게 나타났다(Fig. 14(b)). 이는 인접한 다수의 평면의 법선 벡터 방향이 비슷하다면, RANSAC에서는 단일 절리군으로 파악될 가능성이 크기 때문인 것으로 판단된다. 각각의 방법으로 조사된 암반불연속면의 분포양상 결과는 Table 4에 정리한 바와 같다.
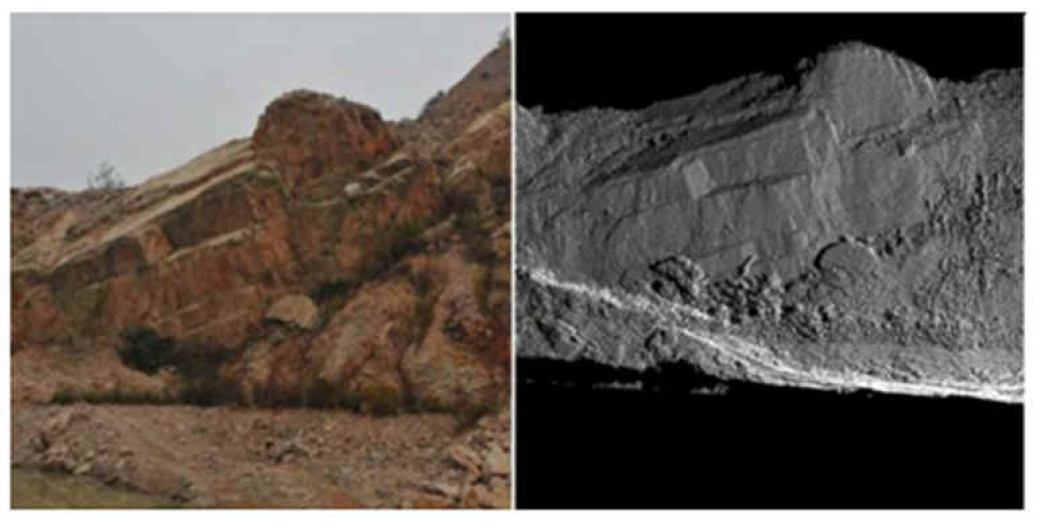
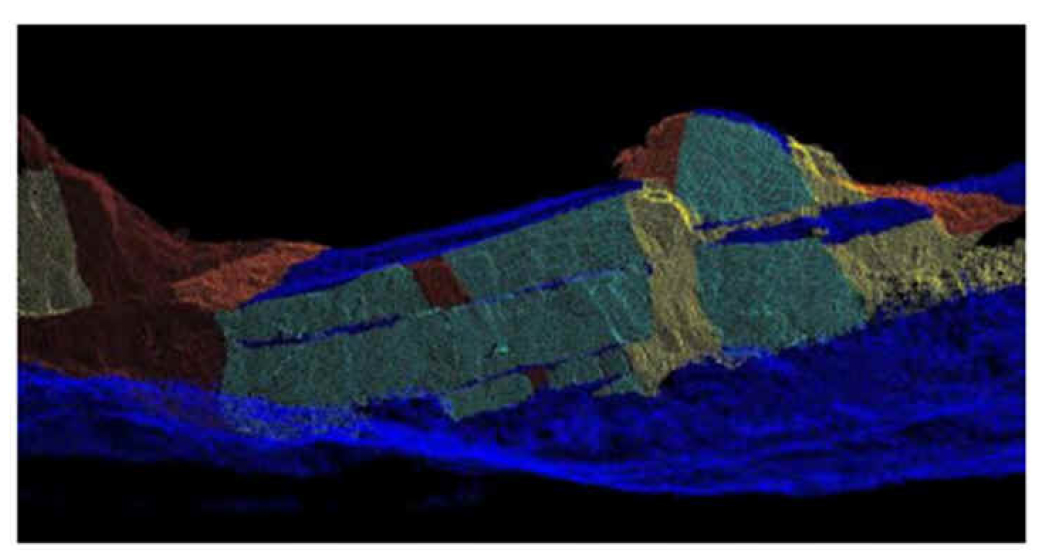
Table 3.
Comparison between proposed method and hand mapping (Han et al., 2017)
Table 4.
Comparison between proposed method and Riquelme method (Han et al., 2017)
| Discontinuity set | Riquelme et al. (2014) | Proposed method |
Dip direction difference | Dip difference | ||
| Dip direction | Dip | Dip direction | Dip | |||
| J1 | 249.04 | 36.66 | 256 | 39 | 6.96 | 2.34 |
| J2 | 172.29 | 83.16 | 168 | 80 | -4.29 | -3.16 |
| J3 | 137.33 | 77.87 | 145 | 74 | 7.67 | -3.87 |
| J4 | 92.96 | 48.74 | 96 | 52 | 3.04 | 3.26 |
| J5 | 288.45 | 68.22 | 284 | 71 | -4.45 | 2.78 |
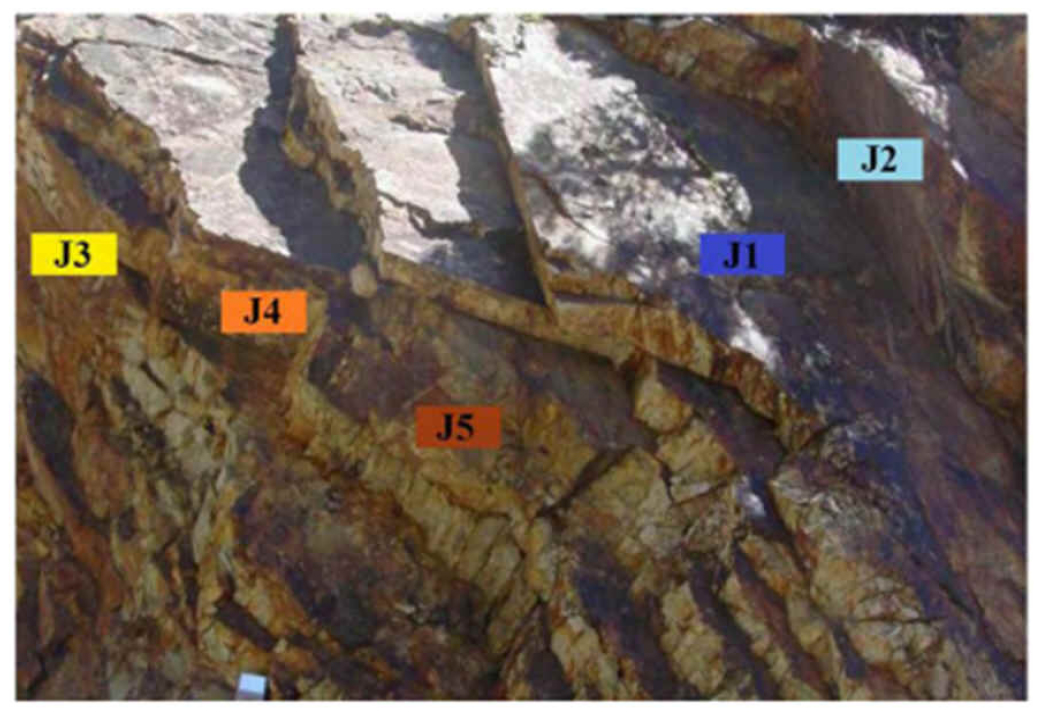
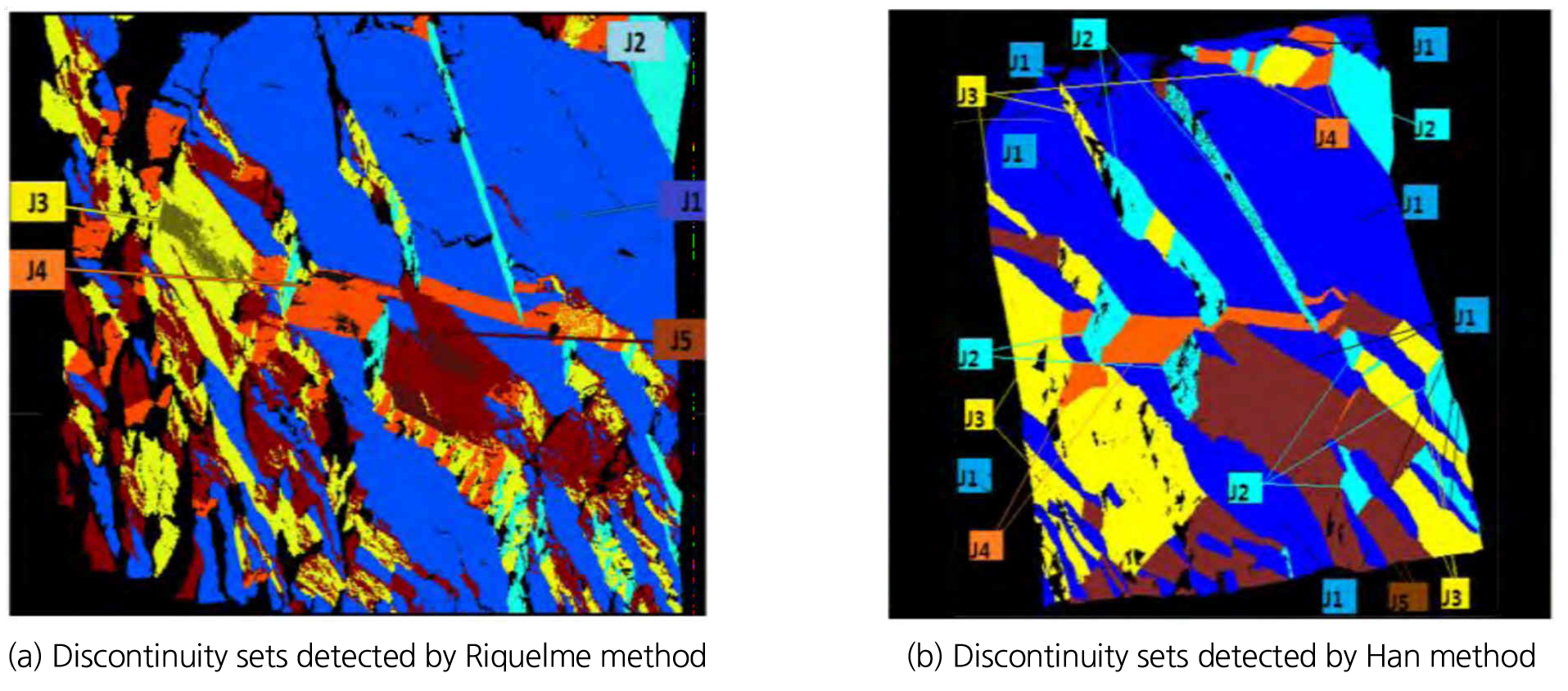
Fig. 14
Five principal discontinuity sets detected by each method (Riquelme et al.(2014) and Han et al., 2017)
5. 결 론
LiDAR를 이용한 암반 사면 및 사면 내 불연속면의 조사 기술은 접근 불가능한 사면에 대한 조사 혹은 대규모 지질조사에 있어 유용하게 사용될 수 있는 전도유망한 기술이지만, 절리군을 분류하고 불연속면에서 데이터를 취득하는 것은 현재로서도 숙련된 기술자의 작업이 필수적으로 요구되는 매우 어려운 과정이다. 특히 LiDAR 촬영으로 획득된 point cloud를 활용함에 있어 사진 또는 점 좌표 정도의 제한된 정보를 이용하여 수행해야 하는 작업인 만큼, 적용되는 알고리즘의 정확도와 신뢰도는 대단히 중요한 요소이다.
따라서 본 연구에서는 LiDAR로부터 획득된 point cloud에서 불연속면을 추출하는 몇 개의 알고리즘들과 이를 연구에 적용한 사례들(Lee, 2020, Han et al., 2017)에 대해 각각의 특징을 설명 및 분석하였다. 분석 결과, 국외에서는 사진 정합과 연계하거나, 또는 기존에 알려진 알고리즘을 변형시키는 등의 다양한 방법들이 시도되고 있는 반면, 국내에서는 Split-FX 소프트웨어 등의 삼각망 구조의 영역 확장 알고리즘을 사용하는 방법이 주로 연구되고 있으며 그 외의 방법에 대한 연구는 아직까지 미진한 실정임을 알 수 있었다. 따라서 본 연구를 통해 LiDAR를 이용한 암반 불연속면 추출 기법 중에 어떤 방법이 현재 더 우수하다고 결정을 내리는 것 보다는 향후 LiDAR 등을 이용한 암반 불연속면 조사 연구 등에서 이러한 알고리즘의 적용에 대한 세계적인 추세를 소개하고자 하였다.
또한 암반 사면의 불연속면 조사는 궁극적으로 암반 분류 수행이라는 최종 목표로 귀결된다. 현재 주로 사용되는 암반 분류 방법으로는 RMR 분류법, Q 분류법 등이 있으나 이 방법들은 암반에 대한 시추 조사를 필수적으로 요구한다. 하지만 point cloud를 활용하는 암반 분류법은 관측을 통해 암반을 분류하는 GSI 분류법 정도로 제한되며, 이 방법은 수많은 불확실성을 내포하고 있는 암반의 특성상 상대적으로 제한된 현장에서만 사용되는 실정이다. 따라서 LiDAR를 이용한 암반 분류를 수행하기 위해서는 GSI 분류법의 광범위한 현장에 대한 적용성 증진 연구 혹은 이를 대체할 수 있는 관측에 의해서만 수행이 가능한 새로운 암반 분류법이 제시되고 이에 대한 현장 적용성이 확보되어야 할 것이다. 따라서 이러한 기법을 통해 LiDAR를 활용한 자동화된 암반 분류 시스템을 구축할 경우 터널 굴진 현장 또는 광산 개발 현장 등에서 인건비를 절감하고 안전을 담보할 수 있는 최적의 지보 대책을 수립할 수 있을 것으로 기대한다.
