

1. 서 론
현대 광산업은 자원 확보 경쟁이 심화됨에 따라 고부가가치 광물의 안정적 공급과 효율적 운영을 위한 기술 혁신의 필요성이 더욱 강조되고 있다. 특히 흑연과 같은 핵심 광물은 2차전지, 전기차, 에너지 저장 시스템 등 전략 산업의 핵심 소재로 활용되면서 그 수요가 급증하고 있으며, 이에 따라 지하에서의 경제적·안정적 채굴이 중요한 과제로 대두되고 있다. 그러나 지하채광 시스템은 복잡한 지하 구조, 제한된 가시성, 비정형적 작업 환경, 다수의 운영 변수 등으로 인해 설계와 운영 최적화가 매우 어렵다. 또한 채굴 방식, 채굴 방향, 공간 배치, 장비 구성에 따라 운영 성능이 크게 달라지기 때문에, 각 광산의 지질·지형적 특성에 적합한 맞춤형 설계가 요구된다(Alford et al., 2007, Newman et al., 2010, Topal and Sens, 2010). 이러한 조건으로 인해 기존의 최적화 알고리즘은 3차원 공간에서의 신뢰성 확보에 한계를 보이며, 실제 작업 환경을 충분히 반영하지 못하는 경우가 많았다.
이 같은 문제를 해결하기 위한 핵심 접근법으로 3D 모델링 기반의 공간 분석 및 시뮬레이션 기술이 주목받고 있다. 3D 시각화 기술은 지하 광산의 복잡한 공간 구조를 이해하는 데 도움을 주고, 광산 설계 및 운영 의사결정 과정에서 중요한 기초자료를 제공하며, 다양한 운영 시나리오를 정량적으로 비교·평가할 수 있도록 한다(Cui, 2019, Liang et al., 2019, Sacha et al., 2019, Boje et al., 2020, Ltifi et al., 2020, Liang et al., 2023). 또한 시뮬레이션 기반의 운영 분석 연구는 장비 구성, 운반 시스템, 출하 계획 등 다양한 운영 인자의 변화를 실험할 수 있어 최적의 운영 전략 도출에 널리 활용되어 왔다(Lee and Choi, 2018, Baek and Choi, 2019, Jung et al., 2020, 2021, 2024).
최근에는 3D 모델링과 시뮬레이션 기술의 융합 개념이 도입되며 광산 산업의 디지털 전환이 가속화되고 있다. 그러나 기존 연구를 살펴보면 3D 모델링 기반 시각화 연구와 시뮬레이션 기반 운영 분석 연구는 활발히 이루어져 왔으나, 광산 설계와 운영 시뮬레이션에 통합하여 실제 현장 수준의 모델을 구축한 연구는 상대적으로 부족하다. 특히, 지하 흑연 광산을 대상으로 한 시뮬레이션 모델 연구는 거의 보고되지 않았다.
따라서 본 연구의 목적은 국내 흑연광을 대상으로 지하채광 시스템의 특성을 분석하고, 이를 구현하여 광산 운영 프로세스를 시뮬레이션할 수 있는 통합 모델을 개발하는 데 있다. 이를 위해 3D 모델링 기술을 활용하여 지하 공간을 정밀하게 재현하고, 이를 기반으로 지하 운반, 지하 파쇄, 출하 시스템으로 구성된 채광 시스템을 설계하였다. 다양한 운영 시나리오를 설정하고 시뮬레이션을 수행함으로써 연구지역의 지하채광 조건에 최적화된 운영 방안을 도출하고자 하였다. 본 연구에서 구축된 모델은 연구지역의 특성을 반영한 현실성 높은 채광 시스템 설계와 함께, 향후 실제 광산 운영 효율성 향상에 기여할 수 있는 기초 연구로서 의의를 가진다.
2. 연구지역
본 연구에서는 흑연광 지하채광 시스템을 특성화하고 프로세스 시뮬레이션 모델을 구축하기 위해 대한민국 경기도 가평군에 위치한 가평 OO 광구를 연구지역으로 선정하였다. 연구지역의 지형은 해발 약 50~125 m 범위에 분포하며, 북측 및 북동측으로 계곡이 형성되어 있어 지형적 기복이 뚜렷하다. 특히 연구지역의 동측에는 북한강변로가 위치하고, 북측에는 마을 진입도로와 농경지가 분포하고 있어 채굴 및 파쇄 공정의 배치, 운반 경로 설정, 소음·진동 관리 계획 수립 시 반드시 고려해야 할 인접 환경 요소로 작용한다. 또한 연구지역 주변은 관광지와 리조트 시설이 밀집해 있어 광산 개발 시 환경 영향 검토 및 지역 주민과의 소통이 중요한 요소로 판단된다.
국내 흑연광은 부존 규모가 제한적이고, 노천채굴 방식을 적용할 경우 분진 발생 등 환경오염을 유발할 가능성이 크므로 지하채광법 적용이 적합하다. 특히 파쇄 공정의 경우 상당한 양의 분진이 발생할 수 있으므로, 갱내 파쇄장을 설치하여 원석을 1차 또는 2차 파쇄한 후 집진 장치를 갖춘 컨베이어로 사일로에 이송하는 방식이 요구된다. 이러한 방식은 환경부하 저감뿐만 아니라 인근 지역과의 갈등을 최소화하는 데에도 기여할 수 있다. 연구지역의 광체 분포와 지하 구조 파악을 위해 지형의 3차원 공간정보와 인터넷에 공개된 문헌 자료(Peninsula Mines Limited, 2019)에서 수집한 물리탐사 및 시추탐사 정보를 통합적으로 분석하였다.
3. 연구방법
본 연구에서는 연구지역의 지형·지질 자료, 위성사진 기반 3차원 공간정보, 물리탐사 결과 및 시추자료 등을 통합하여 지하 흑연광 채광 시스템을 구현하고, 이를 활용하여 공정 시뮬레이션 모델을 개발하였다. 연구 절차는 크게 (1) 지형 및 지질자료 수집과 전처리, (2) 3D 광체 모델링, (3) 지하채광 프로세스의 개념 설계, (4) 이산사건 시뮬레이션 알고리즘 개발, (5) GUI 기반 시뮬레이터 구현, (6) 입력자료 구성 및 시나리오 실험 설계의 단계로 구성된다.
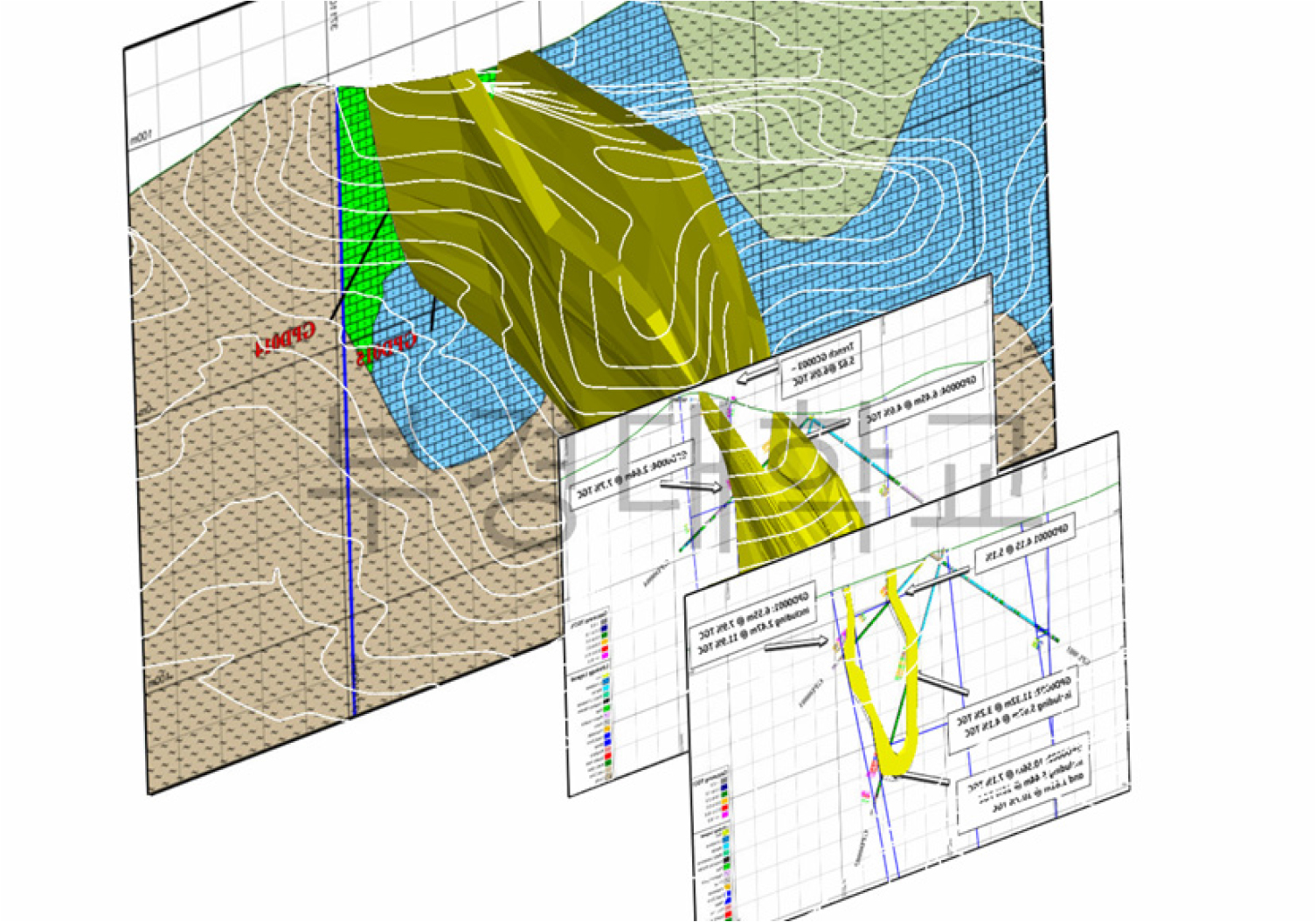
먼저 연구지역의 시추자료(drill log)와 지질단면도(geological cross-sections)를 분석하여 흑연 광체의 3차원 형태를 복원하였다(Fig. 1). 생성된 광체 모델은 지하채광 시스템의 공간 구조(작업장 위치, 운반 경로, 파쇄장 배치 등)와 연계하여 이후 시뮬레이션 수행의 핵심 기반 데이터로 활용하였다. 광체 3D 모델링 과정에서는 광체의 기하학적 형태뿐 아니라 연구지역에서 확보된 물리탐사(전기비저항 탐사 등) 결과도 고려하여 공간적 불확실성을 최소화하였다.
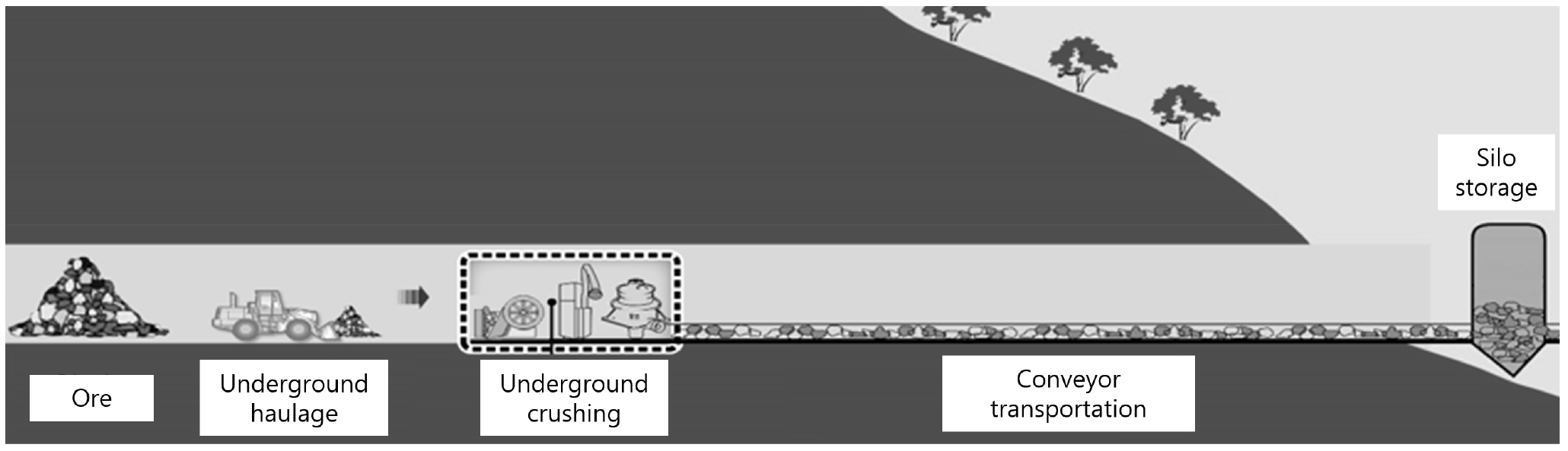
지하 흑연광 채광 프로세스는 실제 현장의 작업 흐름을 반영하여 설계하였다(Fig. 2). 우선 막장과 중단 갱도에서 로더를 이용해 채굴된 원석을 트럭에 적재하여 갱내 파쇄장으로 운반하는 과정으로 시작된다. 갱내 파쇄장에서는 원석을 1차 또는 2차로 파쇄하고, 파쇄된 원석은 집진 장치가 설치된 컨베이어 벨트를 통해 사일로(silo)로 이송된다. 마지막으로 사일로에 저장된 원석은 외부에서 진입하는 덤프트럭이 상차하여 인근 흑연 가공공장으로 운반된다. 이와 같은 전체 물류·생산 흐름은 공간적 제약, 장비 간 간섭, 장비 용량, 작업시간 등 복합적인 요소에 의해 좌우되며, 시뮬레이션 수행을 위한 핵심 구조적 토대가 된다.
채광 프로세스를 기반으로 이산사건 시뮬레이션(discrete-event simulation) 알고리즘을 개발하였다(Fig. 3). 시뮬레이션 알고리즘은 원석이 막장에서 생산된 이후 사일로 상차까지 도달하는 과정에서 발생하는 적재, 이동, 대기, 파쇄, 운반 등 주요 이벤트를 시간 순서에 따라 모사하도록 구성하였다. 각 하위 단계에서는 장비의 이용 가능 여부, 장비 간 상호 간섭, 파쇄 처리 속도 등으로 인해 병목(bottleneck)이 발생할 수 있으며, 알고리즘은 이러한 변동성을 동적으로 반영한다. 특히 장비별 대기시간 및 사이클타임(cycle time)을 추적함으로써 생산성 분석 및 최적 장비 조합 도출이 가능하도록 하였다.
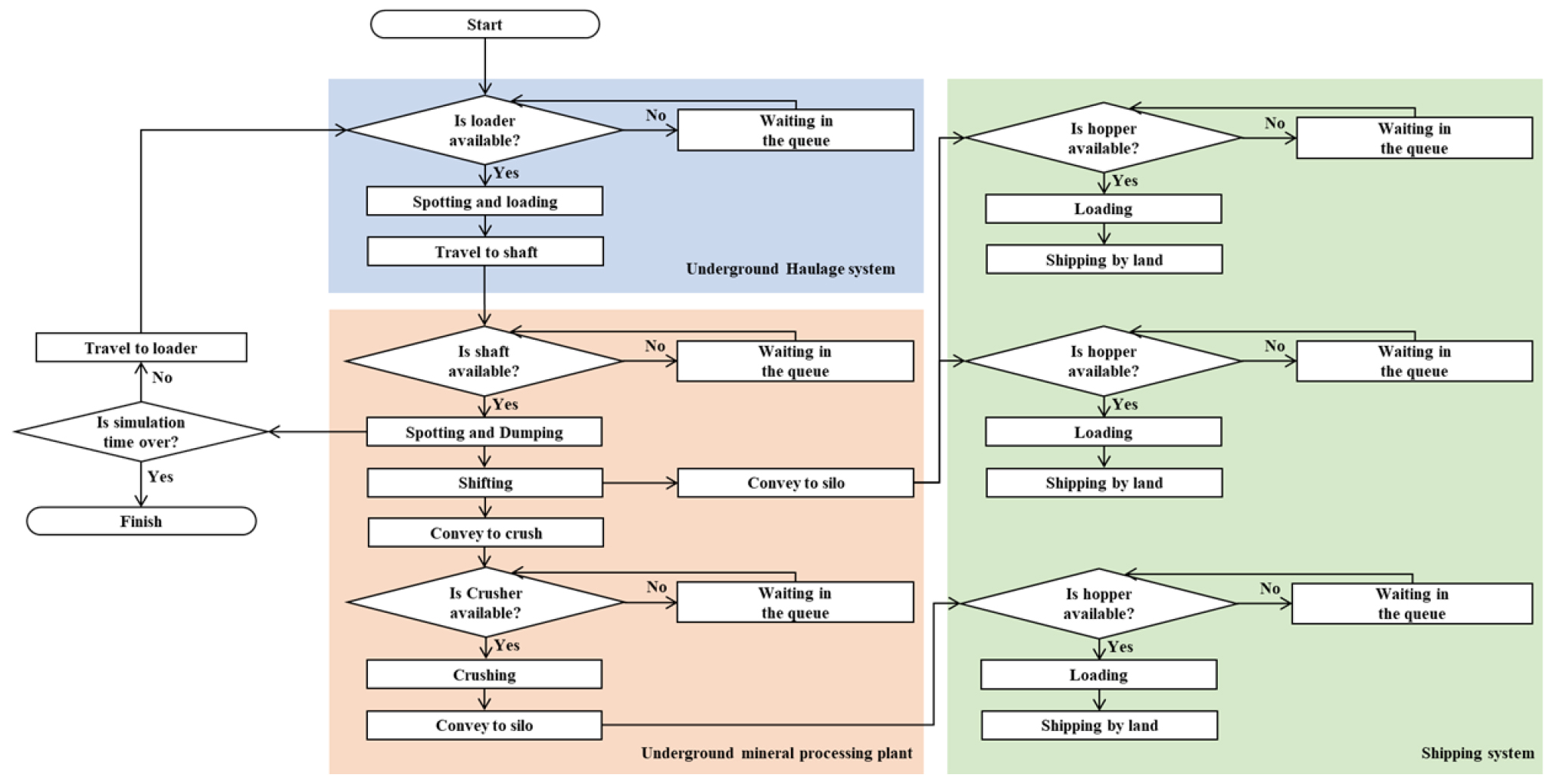
Fig. 3.
Discrete-event simulation algorithm of the underground graphite mining process as shown in Fig. 2
이산사건 시뮬레이션 알고리즘을 실제 분석 도구로 활용하기 위해 AnyLogic 소프트웨어를 사용하여 그래픽 사용자 인터페이스(GUI)를 갖춘 시뮬레이터를 개발하였다. 시뮬레이터는 GUI 모듈과 연산 엔진 모듈로 구성된다. GUI 모듈은 사용자가 시뮬레이션 조건(장비 대수, 작업시간, 컨베이어 속도 등)을 직접 입력하고 결과를 시각적으로 확인할 수 있도록 설계하였으며, 연산 엔진 모듈은 입력된 조건을 기반으로 이산사건 시뮬레이션을 수행하여 생산량, 재고량, 출하량, 장비 이용률 등의 주요 성능 지표를 산출한다. 이를 통해 사용자는 다양한 운영 조건을 비교·평가하며 최적 운영 전략을 도출할 수 있다.
시뮬레이션 입력자료는 크게 시간 관련 인자(time parameters)와 장비 특성 인자(specification of equipment)로 구성하였다(Fig. 4, Table 1). 시간 인자에는 비어 있는 트럭의 주행 속도, 적재 트럭의 주행 속도, 적재 시간, 파쇄 시간이 포함되며, 장비 특성 인자에는 마인트럭 및 로더의 대수, 트럭 및 마인트럭의 적재 용량, 작업시간, 컨베이어 속도 등이 포함된다. Table 1은 이러한 입력 인자의 유형과 단위를 정리한 것이다.
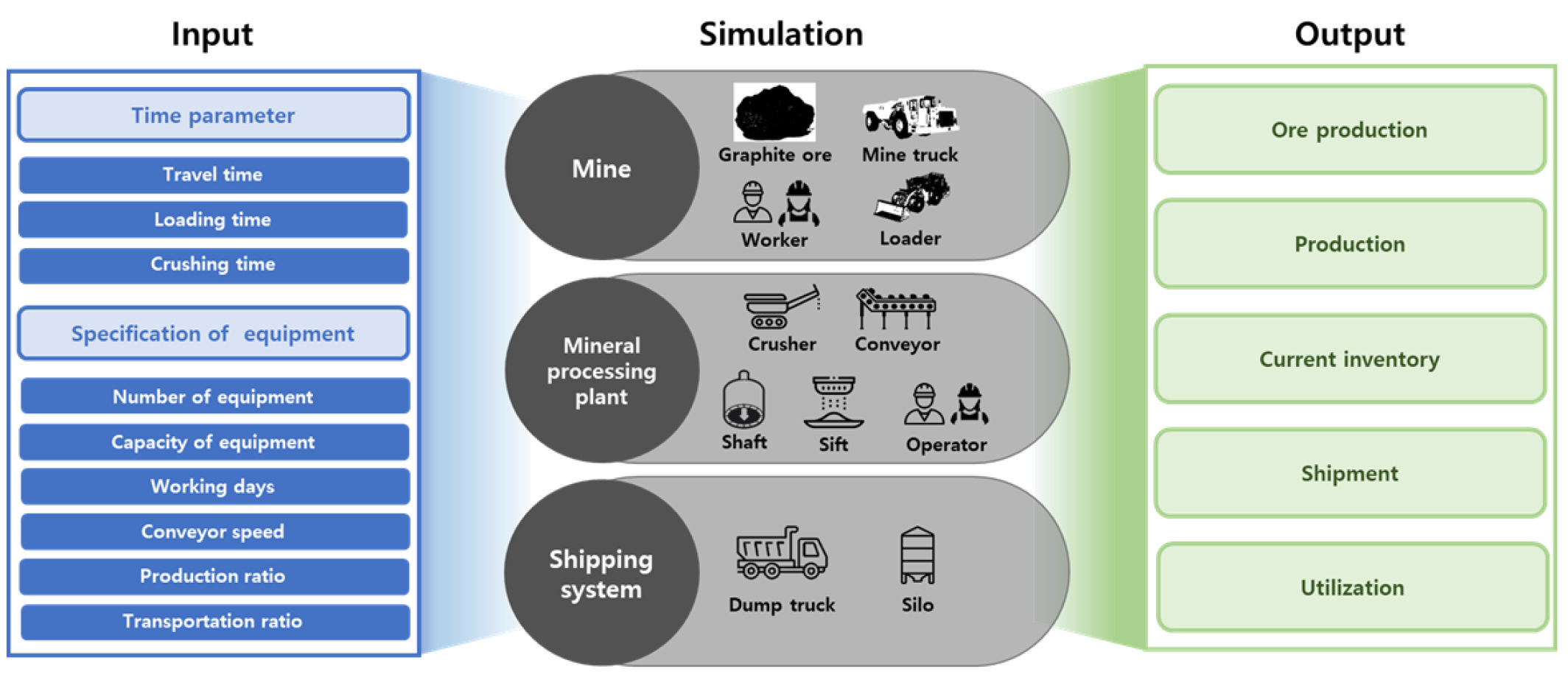
Table 1.
Types and characteristics of simulator input parameters
입력 인자의 구체적인 수치값은 실제 지하 광산에 적용 가능한 장비 제원과 일반적인 작업 조건을 참고하여 설정하였다. 시간 관련 인자와 장비 제원의 대표값은 Table 2에 정리하였다. 예를 들어 비어 있는 트럭의 평균 주행 속도는 25.8 km/hour, 적재된 트럭의 평균 주행 속도는 10.8 km/hour로 설정하였으며, 원석 적재 시간은 4.3분, 파쇄 시간은 톤당 10.3초(sec/tonne)로 가정하였다. 장비 특성 인자의 경우, 갱내 투입되는 마인트럭의 적재 용량은 40 tonnes, 제품 출하용 덤프트럭의 적재 용량은 25 tonnes, 1일 작업시간은 8 hours, 컨베이어 속도는 1 m/sec로 설정하였다.
Table 2.
Simulation input data used in the graphite mining system simulator
개발된 시뮬레이션 모델을 활용하면 연구지역에서의 시간 경과에 따른 흑연광 원석 생산량, 사일로 재고량 및 출하량, 그리고 로더, 트럭, 파쇄기 등 주요 장비·설비의 이용률을 정량적으로 분석할 수 있다. 특히 다양한 운영 조건에 대한 반복적인 시뮬레이션 실행을 통해 장비·설비 이용률은 극대화하면서 단위 시간당 흑연광 원석 생산량을 최대화할 수 있는 운영 인자 조합을 탐색할 수 있다. 이를 위해 본 연구에서는 시스템에 투입되는 트럭과 로더의 수를 변화시켜 세 가지 운반 시나리오(A, B, C)를 구성하였다. 트럭 및 로더의 수는 시나리오(A, B, C)에 따라 변화하는 변수이다.
시나리오 A는 갱내 작업장 1곳에 로더 1대, 트럭 1대를 투입한 경우이고, 시나리오 B는 갱내 작업장 2곳에 로더 2대, 트럭 2대를 투입한 경우이며, 시나리오 C는 갱내 작업장 2곳에 로더 2대, 트럭 3대를 투입한 경우이다. 세 시나리오 모두 파쇄기 1대, 컨베이어 1대, 사일로 1대는 동일한 규격과 성능을 갖는 것으로 가정하였다. 이러한 시나리오 구성은 장비 투입량 증가에 따른 생산성 변화와 병목 발생 양상을 비교·분석하기 위한 것으로, 실제 현장 조건에 근접한 운영 분석과 최적화가 가능하도록 구성하였다.
4. 연구결과
4.1. 채광 시스템 설계 결과
본 연구에서는 연구지역의 흑연 광체를 3차원적으로 분석하고, 이를 바탕으로 지하채광 시스템을 설계하였다. 연구를 위해 먼저 시추자료와 지질단면도를 기반으로 흑연 광체의 3차원 형태를 복원하였다. 3D 모델링 결과, 연구지역의 흑연 광체는 북동–남서 방향으로 연장되어 있으며 경사가 약 90°에 가까운 고각의 수직 구조를 갖는 것으로 나타났다(Fig. 5). 이러한 형태는 흑연 광체가 지질학적 작용에 의하여 변형된 결과로 해석되며, 채광 시 작업면 확보 방식 및 운반 경로 설정에 직접적인 영향을 미친다. 또한 광체는 좌우대칭에 가까운 U자 형태를 보이는데, 이는 광체가 양측으로 굽어 있는 두 개의 연속적인 광체 구간(좌·우 익부)을 형성하고 있음을 의미한다. 따라서 갱도 설계 시 한쪽 익부에만 편중된 단일 수평갱을 굴진할 경우, 반대편 익부의 채굴 접근성이 저하되고 장비 이동 거리 증가, 작업장 간 생산 불균형, 운반·환기 흐름의 편차 등이 발생할 수 있다. 이를 방지하기 위해 본 연구에서는 U자형 광체의 양측 익부를 각각 독립적으로 접근·개발할 수 있도록 두 개의 수평갱을 광체 양측을 따라 평행하게 배치하였다. 이러한 배치는 양측 작업장에서 채굴 및 운반 작업이 유사한 조건으로 수행되도록 하여 장비 배치와 작업 순서를 균형 있게 운영할 수 있게 하며, 결과적으로 작업장 간 생산량 편차를 줄이고 운반 효율과 시스템 안정성을 동시에 확보할 수 있는 구조적 기반을 제공한다.
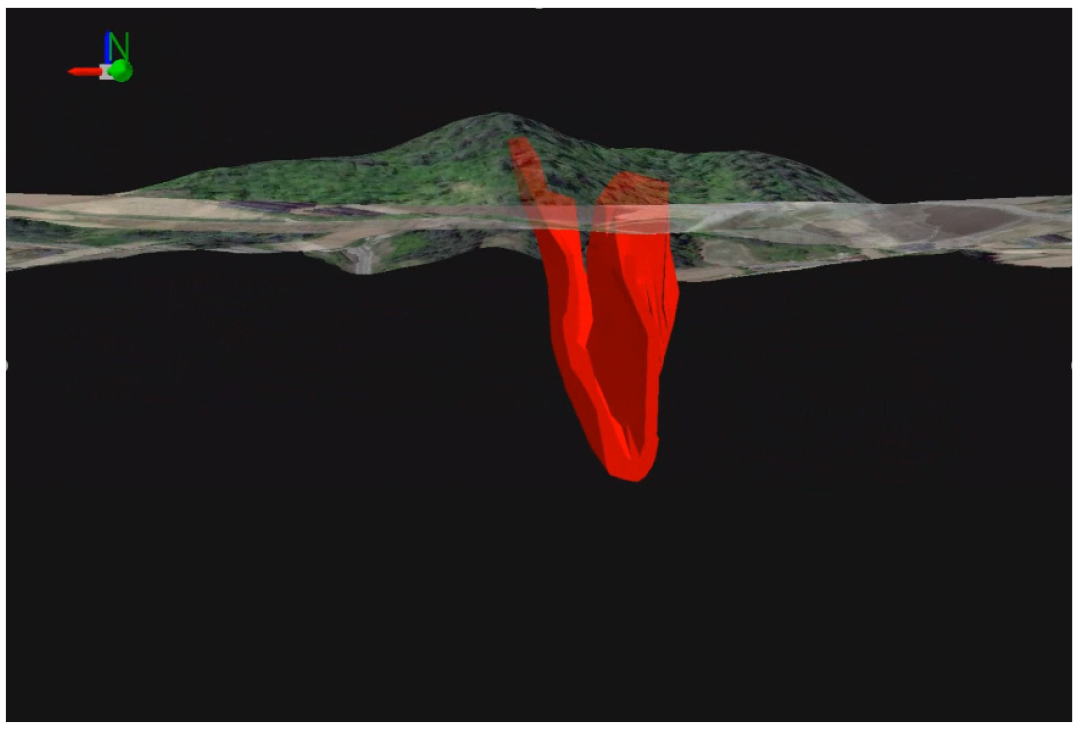
광체는 약 10 ML에서 120 ML 깊이까지 수직적으로 분포한다. 각 깊이 수준에서 광체의 형태, 폭, 방향성 등이 미세하게 변화하는 양상이 확인되었으며, 이는 채굴 레벨 설정과 수평갱의 위치 선정에 중요한 기초자료로 활용되었다. 특히 40 ML~100 ML 구간에서 광체 폭이 비교적 안정적으로 유지되어 본 연구에서는 이 구간을 중심으로 지하채광 시스템을 설계하였다.
갱도 굴진채광 시스템 설계 과정에서는 실제 운영 조건과 지질구조 특성, 작업안전 기준을 반영하여 갱구, 주갱도, 사갱 및 수평갱을 종합적으로 배치하였다. 갱구는 접근성과 환기·물관리 측면을 고려하여 고도 70 ML의 공터에 설치하였으며, 이는 중력 기반 운반 및 통풍 계획 측면에서 유리한 위치였다. 주갱도는 길이 약 150 m의 수평갱으로 설계하였고, 갱구와 사갱 연결구간 모두 동일 고도인 70 ML로 유지하여 진출입 동선의 효율성을 높였다(Fig. 6).
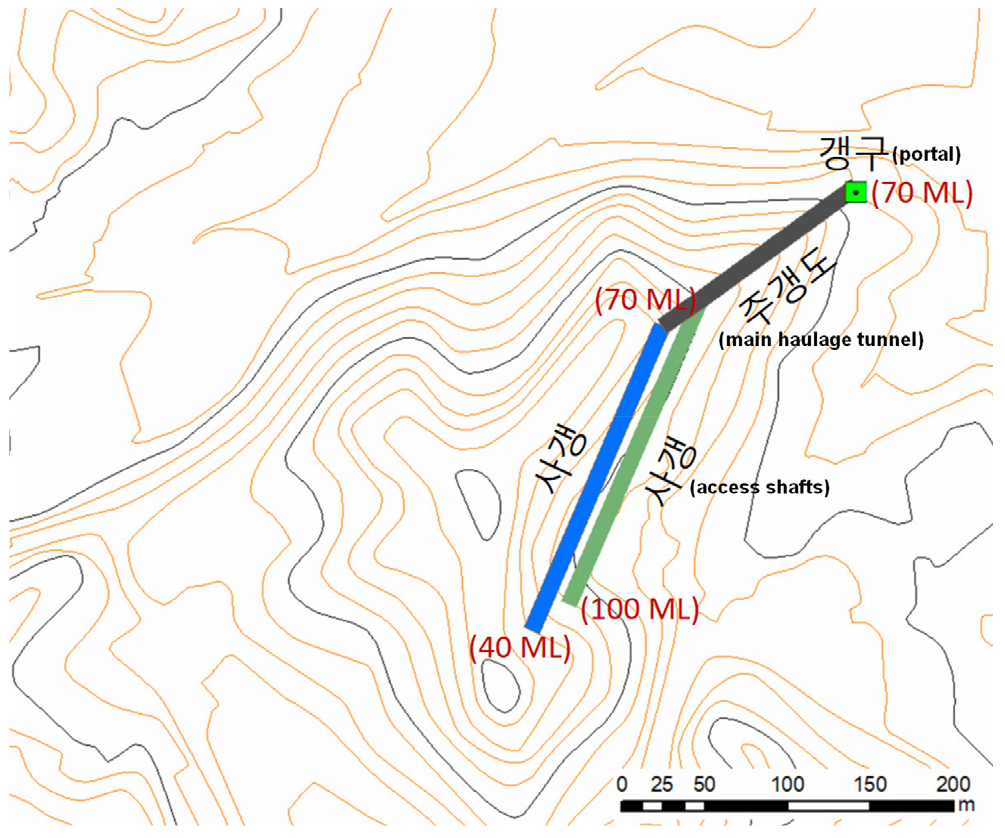
사갱은 상향 사갱과 하향 사갱으로 구분되며, 상향 사갱은 70 ML에서 100 ML까지 연장되도록 설계하였다. 이는 상부 채굴 레벨로의 접근을 가능하게 할 뿐 아니라 환기 흐름을 자연스럽게 형성하도록 돕는 기능도 한다. 반면, 하향 사갱은 70 ML에서 40 ML까지 연결되며, 이는 초기 채굴 단계에서 하부 레벨로 신속하게 접근하기 위한 구조이다. 두 사갱 모두 광체 방향과 병행하여 설계하였으며, 경사는 장비 이동성과 안전성을 고려하여 표준적 기준에 맞추어 배치하였다.
본 연구에서는 연구지역의 광체가 약 90°에 가까운 고각의 수직 경사를 가지며, 좌우가 대칭에 가까운 U자형 형태로 굽어 있는 구조적 특성을 보인다는 점을 채광법 선정의 핵심 조건으로 고려하였다. 이러한 급경사·불규칙 광체는 작업면의 안정성과 광체 추종성이 확보되지 않으면 채굴 과정에서 미채굴 구간이 발생하거나 공동 붕괴 위험이 증가할 수 있다. 따라서 연구지역과 같이 고각으로 연속성이 유지되면서도 곡면 형태를 갖는 광체에는, 작업면을 단계적으로 형성하고 채굴 직후 공동을 충전하여 지반 안정성을 확보할 수 있는 충전식(cut-and-fill) 채광법이 가장 적합하다고 판단하였다. 충전식 채광법은 급경사 광체에서 상향·하향 단계 개발이 가능하고, 채굴 후 충전을 통해 공동 안정성을 지속적으로 확보할 수 있으며, 광체 형태를 따라 유연하게 작업면을 조정할 수 있어 U자형 광체 구조에 대한 추종성이 높다. 반면 중단(sublevel stoping) 채광법이나 슈린케이지(shrinkage) 채광법은 비교적 단순하고 연속적인 광체 형상을 전제로 하거나, 대규모 공동 형성이 불가피하여 연구지역과 같은 곡면 고각 광체에서는 안정성 측면의 제약이 크다고 판단하였다. 또한 주방식(room-and-pillar) 채광법은 완만한 광체 및 수평적 확장에 유리한 반면, 본 연구지역처럼 수직에 가까운 광체에는 적용 효율이 낮을 것으로 보인다.
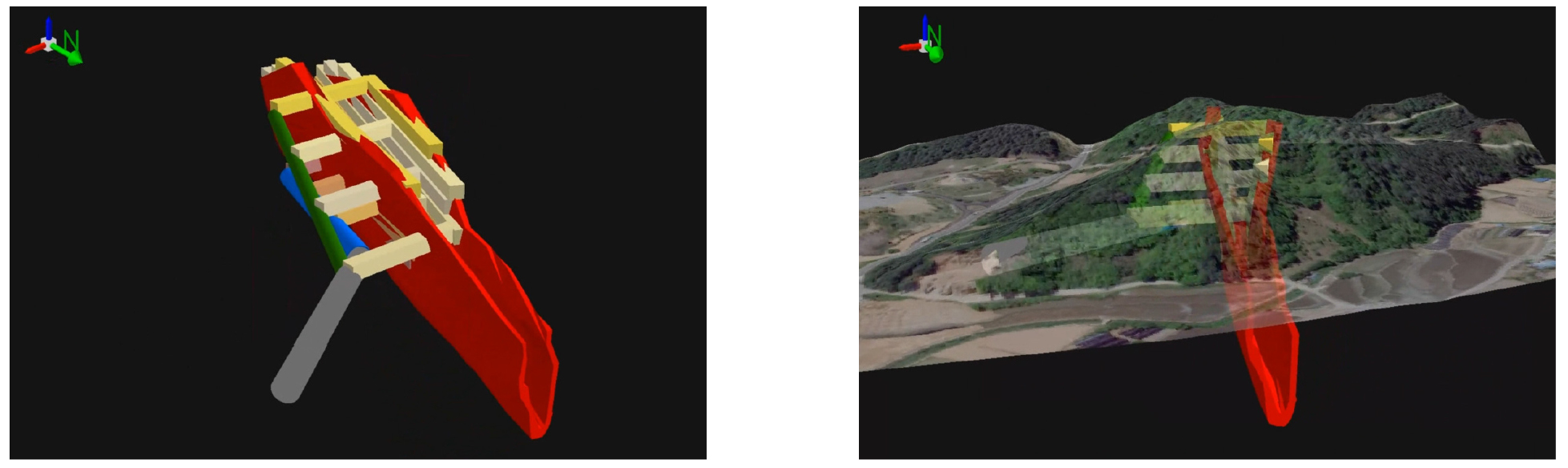
본 연구에서는 U자형 광체 형태를 고려하여 각 레벨에서 양측에 두 줄의 수평갱을 평행으로 굴진하는 방식으로 설계하였다. 이러한 방식은 광체를 양측에서 동시에 접근할 수 있게 하여 채굴 장비의 이동 경로를 최소화하고, 전체 생산성을 향상시키는 데 유리하다. 또한 양측 갱도 간의 간격을 적절히 유지하여 충전식 채광법 적용시 충전 작업이 원활히 이루어지고, 레벨별 안정성이 확보될 수 있도록 하였다. 40 ML부터 100 ML까지 설계된 지하갱도 굴진채광 시스템을 3차원 가시화한 결과는 Fig. 7과 같다.
본 연구에서는 충전식 채광법을 적용하여 단계적 개발 전략을 수립하였다. Fig. 8은 채굴 순서를 나타내며, 40 ML에서 시작하여 50 ML, 60 ML 등 상부로 점진적으로 이동한다. 충전식 채광법은 채굴 후 발생하는 공동을 폐석 또는 충전재로 채워 지반 안정성을 확보하는 방식으로, 급경사 또는 복잡한 광체 형태를 가진 광상에서 널리 사용된다. 연구지역처럼 고각의 U자형 광체의 경우, 상향 채굴 과정에서 발생할 수 있는 붕괴 위험을 줄이고 작업면의 안전성을 유지하는 데 특히 유리하다.
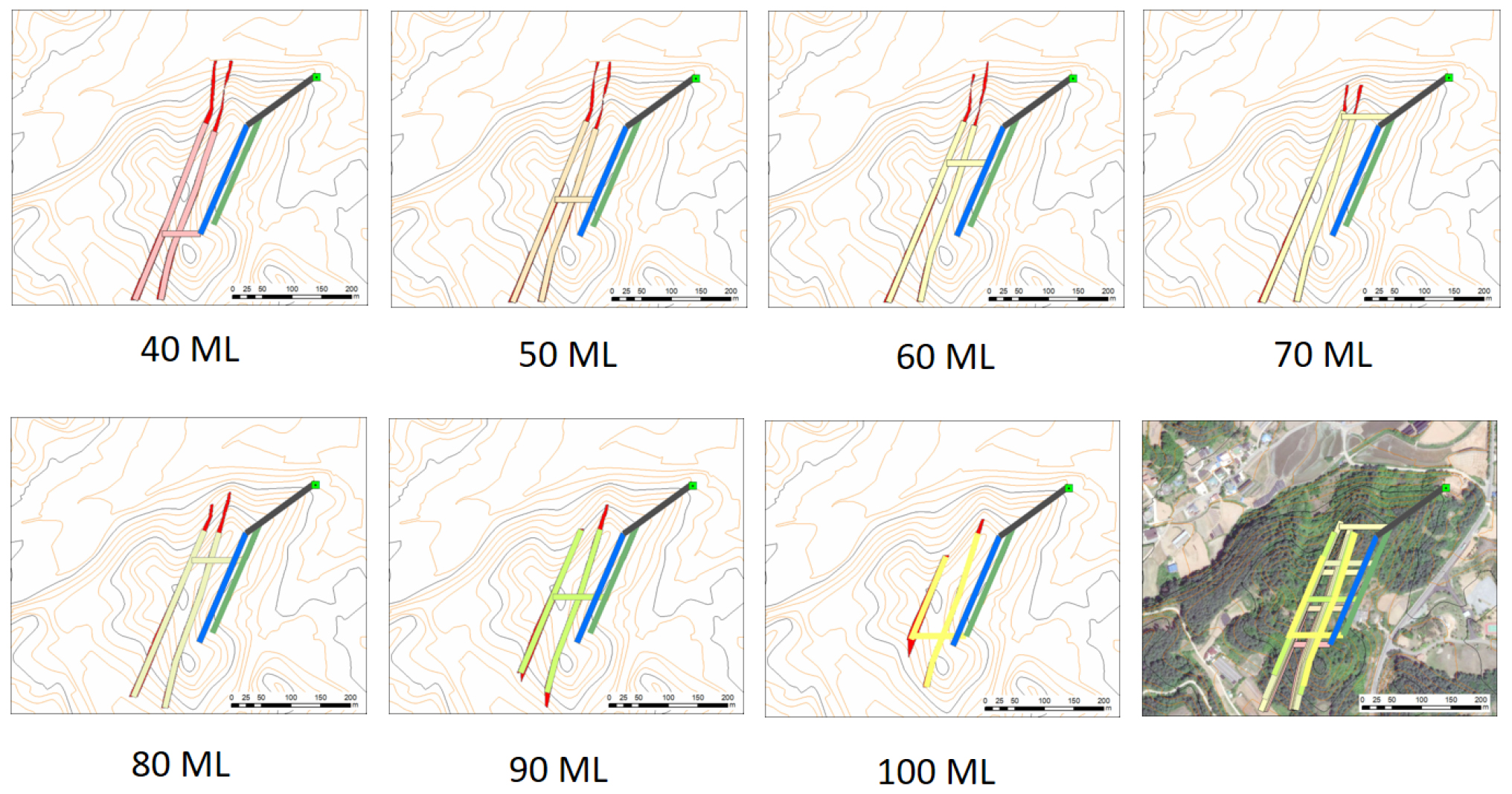
단계별 개발 과정에서는 각 레벨에서 채광–운반–파쇄–저장–출하 작업이 순차적으로 수행되며, 상부 레벨 개발은 하부 레벨의 작업이 완전히 종료된 후 진행된다. 이러한 방식은 작업 간 간섭을 최소화하고 장비 운영의 효율성을 높이는 동시에, 시뮬레이션 모델과 연계하여 운영 병목을 분석하기 위한 구조적 기반을 제공한다.
이와 같은 설계 결과는 향후 공정 시뮬레이션 수행 시 장비 배치, 이동 경로, 운반 거리, 작업 사이클 타임을 정량적으로 평가할 수 있는 기반을 마련하며, 최적의 운영 전략 도출을 위한 필수 단계로 기능한다. 특히 설계를 통해 실제 지하 조건과 유사한 환경에서의 시뮬레이션이 가능해짐으로써, 운영 효율과 안전성을 동시에 확보할 수 있는 시스템 구성이 가능해졌다.
4.2. 시뮬레이션 결과 분석
본 연구에서 구축한 시뮬레이션 모델은 갱도 굴진채광 시스템의 공간적 구조와 운영 프로세스를 반영하여 구현되었다. 시뮬레이터는 각 레벨에서의 작업장 배치, 운반 거리, 장비 구성 조건 등이 실시간으로 반영되며, 장비 간 상호작용·사이클 타임·대기행렬·자원 이용률 등이 동적으로 계산되도록 구성하였다. 특히 AnyLogic 기반의 시각화 환경을 통해 트럭과 로더의 이동 경로, 파쇄기 처리 과정, 사일로 적재 및 출하 흐름을 직관적으로 확인할 수 있어, 시스템의 운영 흐름과 병목 위치를 명확하게 파악할 수 있다.
시뮬레이션은 연구지역의 대표적인 세 개의 레벨(40 ML, 70 ML, 90 ML)을 대상으로 수행하였다. 각 레벨은 작업장 A와 B 두 개의 적재지점을 포함하며, 적재지점에서 갱내 파쇄기까지의 평균 운반거리는 40 ML에서 약 686 m, 70 ML에서 497 m, 90 ML에서 495 m로 산출되었다. 이는 레벨별 운반거리 차이가 생산량 및 장비 이용률에 중요한 영향을 미치는 변수임을 시사한다. 연구에서는 Table 2에 제시한 입력 데이터를 기준으로 삼아, 장비 대수를 변화시킨 세 가지 시나리오(A, B, C)에 대해 총 8시간 작업 기준의 시뮬레이션을 수행하였다.
시나리오 A는 로더 1대와 트럭 1대를 투입하는 가장 기본적인 장비 구성이며, 전체 시스템의 최소 성능 기준을 평가하는 데 활용되었다. Table 3은 시나리오별 시뮬레이션 결과를 제시한다. 90 ML이 모든 레벨 중 가장 높은 생산량을 기록하였으며(A지점 1,960톤, B지점 1,760톤), 이는 90 ML의 상대적으로 짧은 운반거리로 인해 단위시간당 운반사이클이 빠르게 반복되었기 때문으로 해석된다. 반면 40 ML은 운반거리가 가장 길어 A지점 1,720톤, B지점 1,480톤으로 가장 낮은 생산량을 기록하였다. 로더 이용률 역시 거리효과와 생산량에 비례하는 경향을 보여 90 ML이 A지점 49%, B지점 45%로 가장 높았다. 주목할 점은 모든 레벨에서 파쇄기 앞 대기행렬과 대기시간이 0으로 나타났으며, 이는 단일 장비 체계에서는 파쇄기의 처리용량이 병목요인이 되지 않음을 의미한다. Fig. 9는 40 ML에 대해서 시나리오 A와 같이 시뮬레이션을 수행했을 때 8시간 경과 시점의 주요 지표를 시각적으로 보여준다.
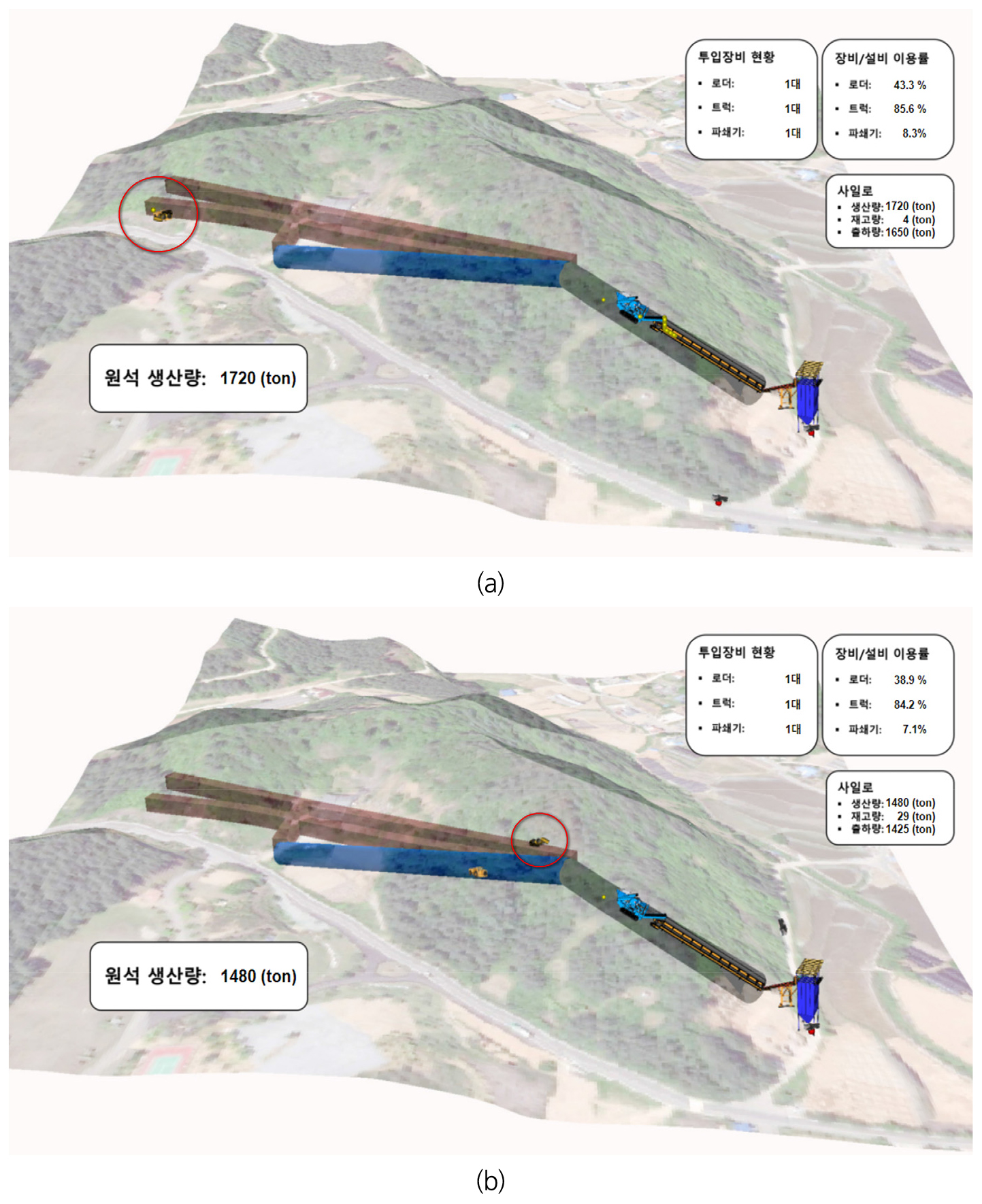
Table 3.
Simulation results for Scenarios A–C, summarizing ore transport, shipment, loader utilization, and crusher queue indicators by level and location
시나리오 B에서는 작업장 A와 B에 각각 로더 1대와 트럭 1대를 배치하여 장비 투입량을 두 배로 증가시켰다. 그 결과 전체 생산량과 출하량은 시나리오 A 대비 크게 증가하였으며(예: 70 ML의 경우 3,575톤으로 최대 출하량 기록), 장비 간 균형 잡힌 투입이 시스템 효율을 향상시키는 것으로 확인되었다(Table 3). 그러나 시나리오 A와 달리 파쇄기 앞 대기행렬과 대기시간이 발생하였으며, 특히 70 ML 작업장에서 약 5분의 대기시간이 확인되었다. 이는 트럭과 로더 증가로 인해 파쇄 시스템에 부담이 가중되면서 병목현상이 시작됨을 의미한다. 그럼에도 로더 이용률은 시나리오 A와 유사한 수준을 유지하면서도 90 ML 작업장에서 가장 높은 이용률을 보였는데, 이는 해당 레벨의 운반거리가 짧아 로더가 상대적으로 높은 빈도로 적재 작업을 수행했기 때문으로 분석된다.
시나리오 C에서는 트럭 3대를 투입하여 작업장 B에 2대를 배치하는 강화된 운영조건을 적용하였다. 그 결과 전체 생산량과 출하량은 세 가지 시나리오 중 가장 높았으며, 특히 70 ML 작업장이 5,200톤으로 최대 출하량을 기록하였다. 로더 2대 투입으로 인해 로더 이용률은 전반적으로 높아졌으며, 90 ML B지점에서 최대 88%의 이용률을 기록하여 장비 과부하에 가까운 높은 활용도를 나타냈다. 그러나 트럭 증가로 인해 파쇄기 처리부하가 크게 증가하면서 모든 레벨에서 대기행렬·대기시간이 가장 길게 나타났고, 90 ML에서는 약 7분의 대기시간이 기록되었다(Table 3). 파쇄기 병목현상의 심화는 시스템 생산성을 제한하는 주요 요인으로 작용했으며, 이는 트럭 및 로더 투입만으로는 시스템의 처리용량을 지속적으로 향상시키기 어려움을 시사한다.
본 연구에서 설정한 시나리오 A, B, C는 장비 투입량 변화에 따른 시스템 거동과 병목 발생 여부를 1차적으로 파악하기 위한 대표 조합으로 구성되었다. 그러나 장비 투입 수 변화에 따른 생산성 증가는 선형적이지 않을 수 있으므로, 최적 장비 조합은 단순한 증설이 아니라 공정 간 처리능력 균형이 성립하는 조건에서 도출되어야 한다. 즉, 운반 시스템의 처리율(트럭·로더 조합에 의해 결정되는 단위시간당 원석 공급량)이 파쇄 시스템의 처리율(파쇄기 용량)에 근접하거나 이를 초과하기 시작하는 시점부터 대기행렬과 대기시간이 급격히 증가할 가능성이 높다. 따라서 최적점은 ‘운반 처리율 ≈ 파쇄 처리율’이 만족되는 장비 조합 구간에서 형성될 개연성이 크며, 이 구간을 중심으로 장비 수를 세분화하여 탐색하는 접근이 필요하다. 향후 연구에서는 트럭 1–4대, 로더 1–3대 수준에서 조합을 확장한 다수의 시나리오를 수행하거나, 공정별 단위 처리율을 이용해 탐색 범위를 사전에 제한한 뒤 해당 범위에서 반복 시뮬레이션을 수행하는 방식으로 최적 장비수를 체계적으로 도출할 필요가 있다. 이는 장비 투입량 증가에 따른 생산성 변화를 단순 비교하는 수준을 넘어, 공정 처리능력 밸런스를 기반으로 한 논리적 최적화 전략의 필요성을 뒷받침한다.
한편 Location A와 B의 결과 차이는 확률적 변동보다는 작업장–파쇄기 간 운반거리와 동선 구조 차이에 의해 발생한 것으로 해석된다. 레벨별 레이아웃에서 Location B는 Location A보다 파쇄기까지의 평균 운반거리가 길거나(예: 40 ML에서 A=595 m, B=777 m) 교차·굴곡 구간이 상대적으로 많은 경로로 구성되어, 트럭의 유효 주행 속도를 저하시킬 가능성이 높다. 이에 따라 B 작업장의 트럭 사이클 타임이 증가하고, 동일한 장비가 투입되더라도 단위시간당 운반 및 적재 횟수가 감소하여 생산량과 출하량이 A보다 낮게 나타난다. 또한 운반거리 증가에 따른 트럭 귀환 간격 확장은 로더 대기시간을 증가시키므로, B 작업장에서 로더 이용률이 A보다 낮게 산출되는 경향을 설명할 수 있다. 즉, Location 간 성능 차이는 광체 자체의 품위나 가행성 차이보다 운반거리 및 경로 효율이 장비 사이클을 지배하는 구조적 요인으로 작용한 결과이며, 향후 최적화에서는 레벨 단위 장비수 조정뿐 아니라 Location별 운반경로 단축, 교차구간 최소화, 파쇄기 배치 최적화 등 공간적 설계 개선이 병행되어야 함을 시사한다.
세 가지 시나리오를 종합하면, 트럭·로더 증가에 따라 출하량은 향상되지만 일정 수준 이상에서는 파쇄 공정이 병목으로 전환되며 시스템 효율을 제한한다. 특히 시나리오 C는 최대 생산량을 달성했으나 파쇄기 대기행렬이 가장 크게 증가하여 운영 효율 측면에서는 불리할 가능성이 높다. 반면 시나리오 B는 생산성과 대기 수준이 균형을 이루는 구간으로 평가되며, 실운영 적용을 위한 현실적 최적 조합 후보로 판단된다. 따라서 향후 생산성의 추가 향상을 위해서는 장비 증설보다 파쇄 용량 확대 또는 다중 파쇄기 운영과 같은 병목 완화 전략이 우선적으로 검토될 필요가 있다.
5. 결 론
본 연구에서는 경기도 가평군에 위치한 가평 OO 광구를 대상으로 흑연광 지하채광 시스템을 구축하고, 이를 활용한 공정 시뮬레이션 모델을 개발하였다. 연구는 먼저 지형·지질 정보, 물리탐사 자료, 시추자료를 통합하여 흑연 광체의 3차원 모델을 구현하였으며, 이를 기반으로 연구지역에 적합한 갱도 굴진채광 시스템을 설계하였다. 모델은 실제 지하 구조와 운영 환경을 정밀하게 반영함으로써 채광 시스템의 설계 타당성을 검증하고, 시뮬레이션 기반 운영 분석이 가능하도록 하는 핵심 플랫폼으로 활용되었다.
흑연 광체는 약 90도에 가까운 고경사 구조를 가지고 있으며, 단면 형태가 좌우 대칭에 가까운 U자형을 이루고 있었다. 이러한 지질적 특성을 고려하여 두 개의 평행한 수평갱을 조성하고, Cut-and-Fill 채광법을 적용하는 시스템을 설계하였다. 설계된 채광 구조는 지하광산에서의 안전성 확보와 채굴 효율 증대를 동시에 고려한 결과이며, 이를 기반으로 현실적인 갱도 개발 전략을 마련할 수 있었다.
개발된 시뮬레이션 모델은 설계된 갱도 구조와 공정 흐름을 반영하여 장비 배치, 운반 거리, 파쇄 공정, 출하량 등 다양한 운영 요인을 정량적으로 평가할 수 있도록 구성되었다. 시나리오 A(로더 1대·트럭 1대), 시나리오 B(로더 2대·트럭 2대), 시나리오 C(로더 2대·트럭 3대)에 대한 시뮬레이션 결과, 트럭 수가 증가함에 따라 원석 운반량과 출하량은 지속적으로 개선되었으나, 시나리오 B와 C에서는 파쇄기 앞에서의 대기행렬이 증가하며 병목현상이 발생하였다. 특히 시나리오 C는 최대 생산량을 달성하였음에도 불구하고 파쇄기 병목으로 인해 시스템 전체 효율성이 저하되는 양상을 보였으며, 로더 이용률이 일부 작업장에서 75% 이상을 기록하여 과부하 운영 가능성을 보여주었다. 반면 시나리오 B는 일정 수준의 생산성 향상과 장비 효율 사이에서 가장 균형적인 성능을 나타내었으며, 실제 운영에서도 적용 가능한 현실적인 최적화 수준으로 판단되었다.
본 연구는 3차원 공간정보, 이산사건 시뮬레이션을 통합함으로써 지하 흑연광 개발 과정에서의 시스템 설계 및 운영 전략을 기술적으로 분석할 수 있는 기반을 마련하였다. 그러나 본 연구는 경제성 평가, 사업 추진 시 요구되는 인허가 절차, 환경적 영향, 지역사회 수용성, 갱도 규격의 안정성 등 광산 개발의 실제적인 정책·관리적 요소를 검토하지 않았다. 즉, 본 연구는 경제적 타당성과 안전성이 확보되고 법적·환경적 제한 사항이 해소되었다는 가정을 전제로 기술적 관점에서의 최적 채광 시스템 설계 및 운영 효율 분석에 집중하였다. 따라서 본 연구의 결과는 기술적 성능 평가와 운영 최적화 가능성을 제시하는 기본 모델로 해석되어야 하며, 실제 사업 적용 시에는 보다 포괄적인 검토가 필요하다.
향후 연구에서는 본 연구에서 제외된 경제성 분석, 인허가 요건, 환경영향 평가, 지역사회 수용성 등을 포함한 다차원적 검토가 병행될 필요가 있다. 또한 발파 공정, 충전 작업, 지반 안정성, 다중 파쇄 시스템, 환기·배수 시스템 등 실제 지하광산 운영에서 필수적인 요소들을 단계적으로 통합함으로써 모델을 보다 현실적으로 고도화할 수 있을 것이다. 더 나아가 실시간 센서 데이터 연동, 예측 유지보수, 최적화 알고리즘 접목 등을 통해 기술적·경제적·환경적 측면을 아우르는 종합 의사결정 지원 시스템으로 발전시킨다면, 향후 국내외 지하 흑연광 개발과 운영 효율성 향상에 기여할 수 있을 것으로 기대된다.
